
Current Articles
Display Method: |
2025, 39(2)
:191-208.
doi: 10.1007/s13344-025-0015-8
Abstract:
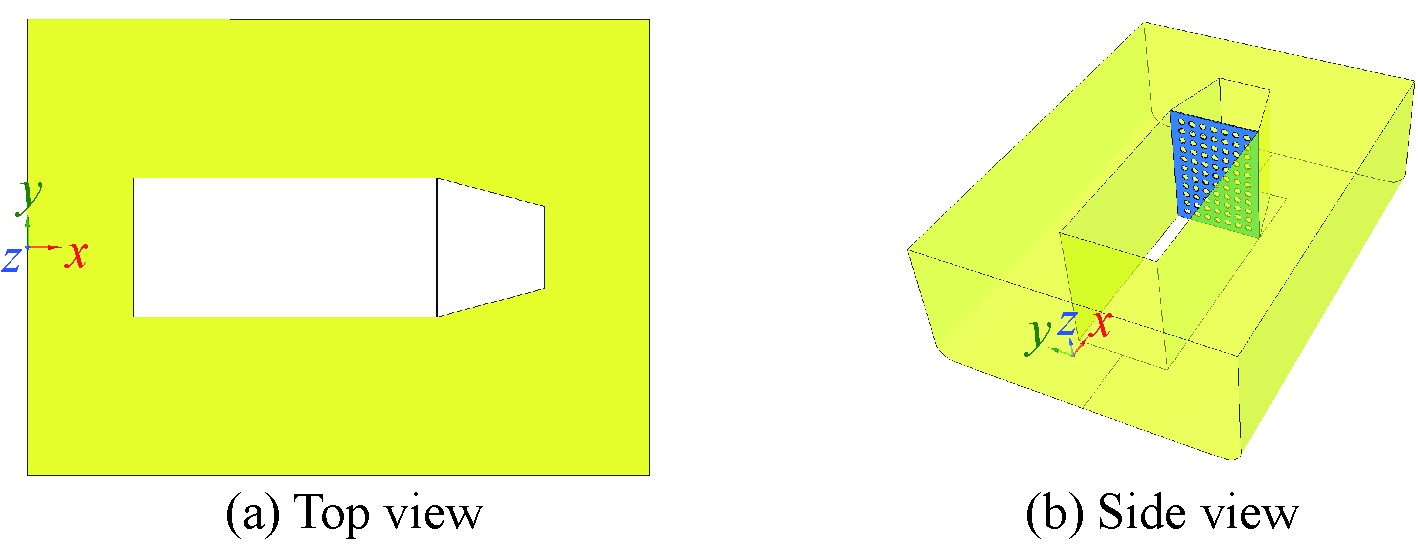
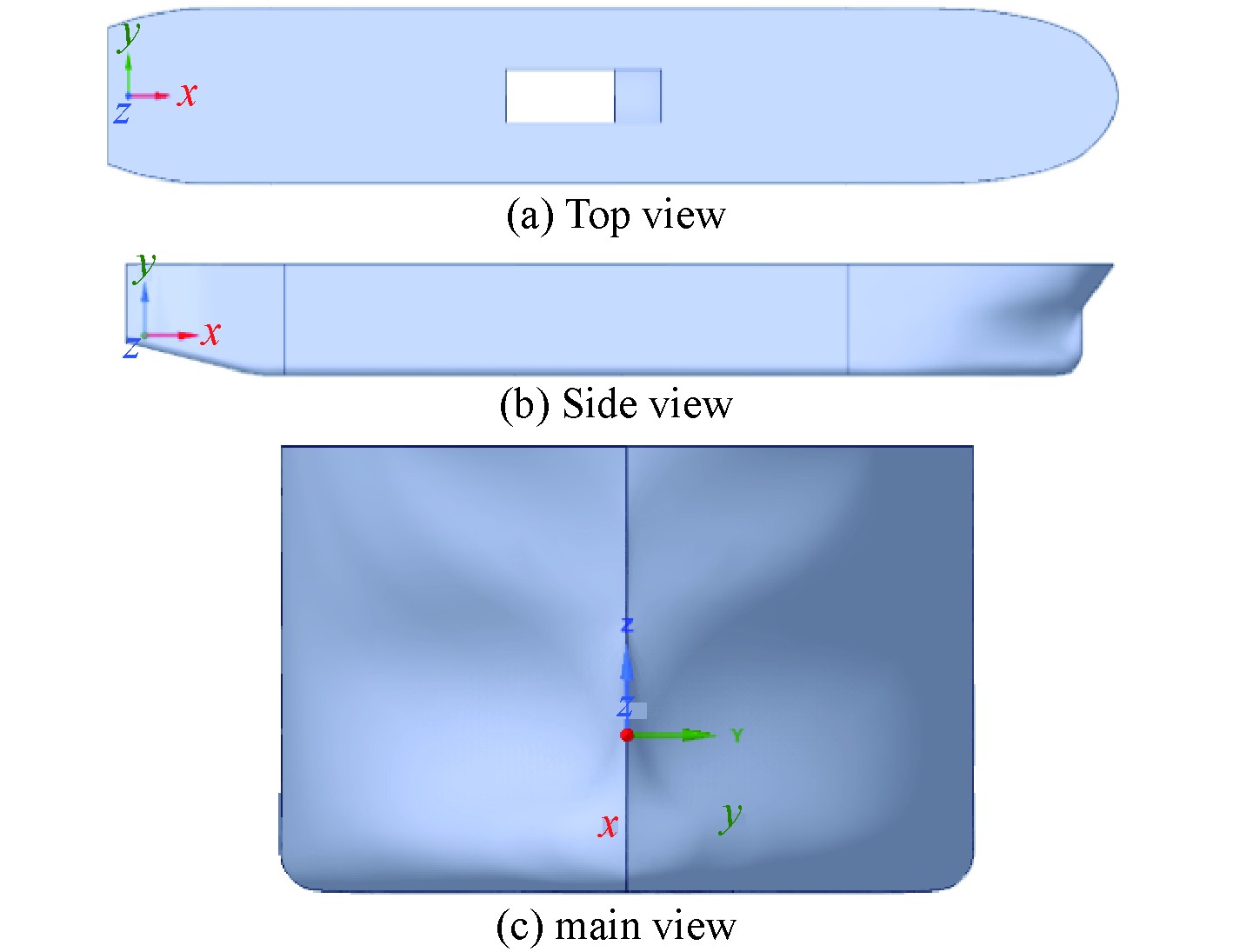
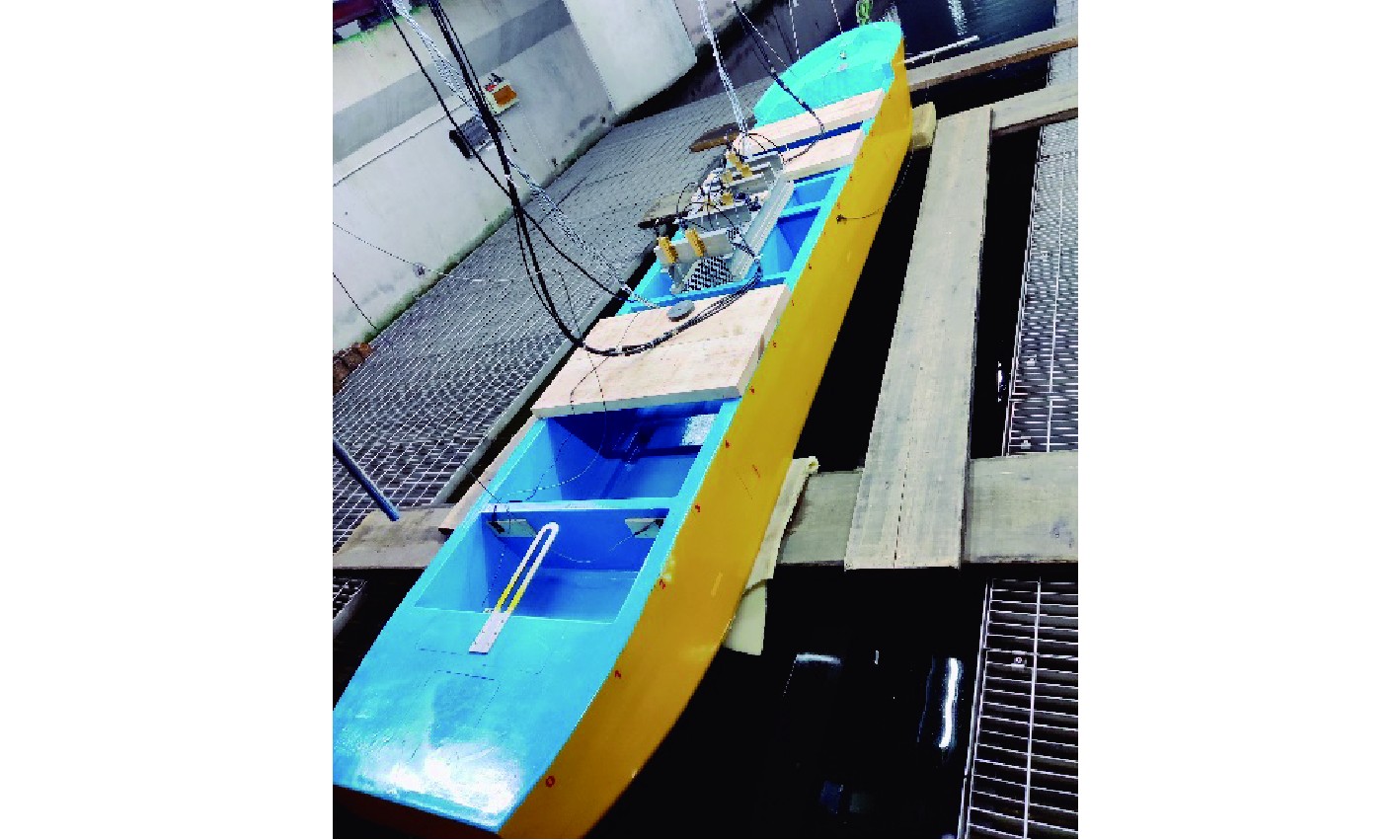
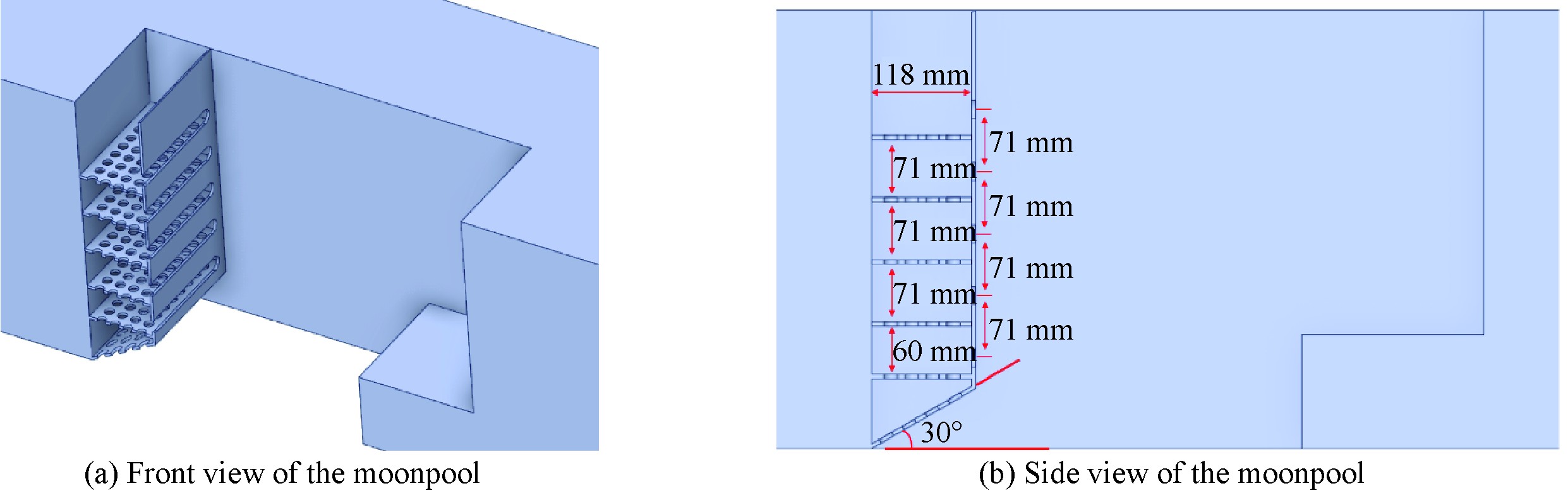
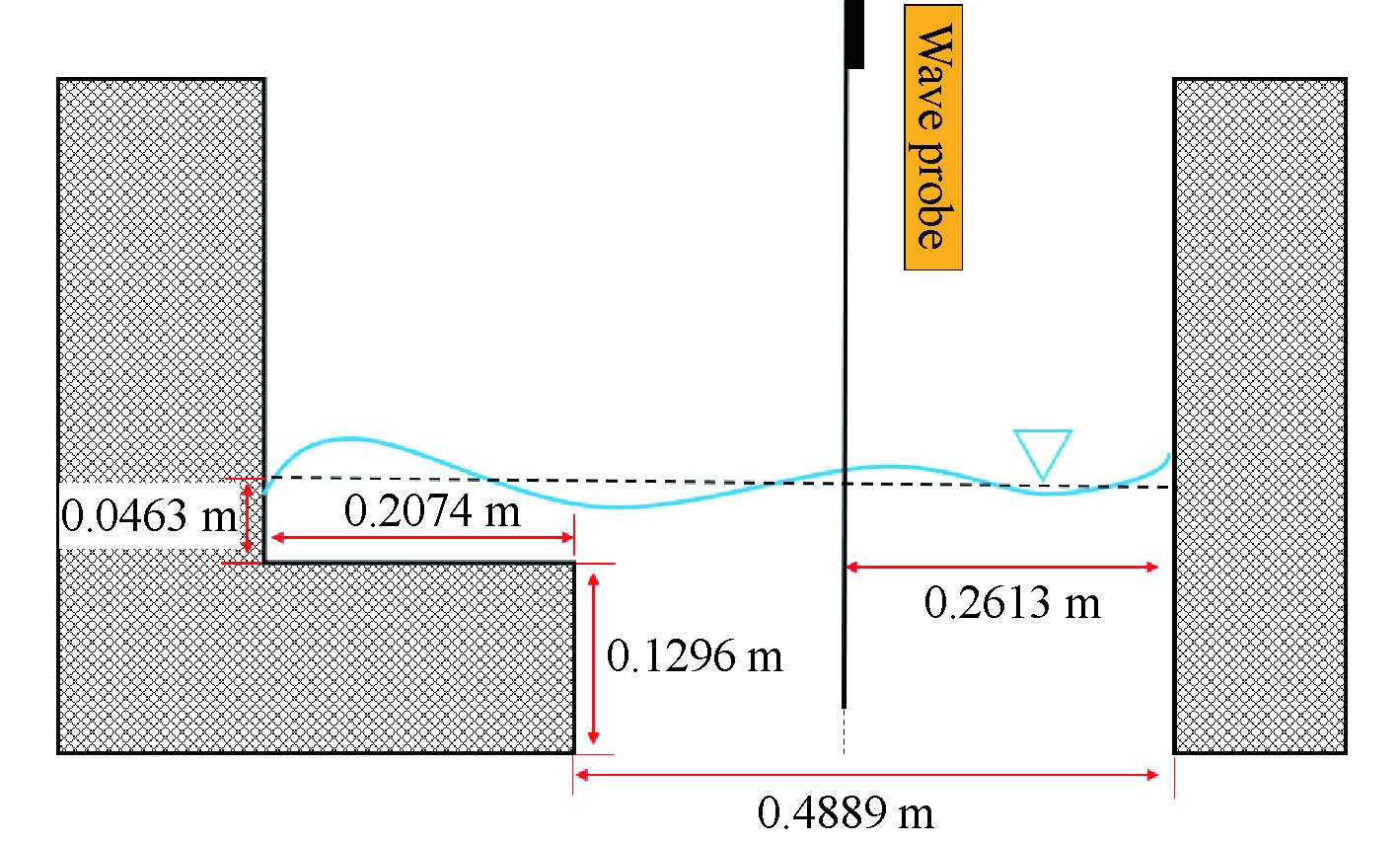
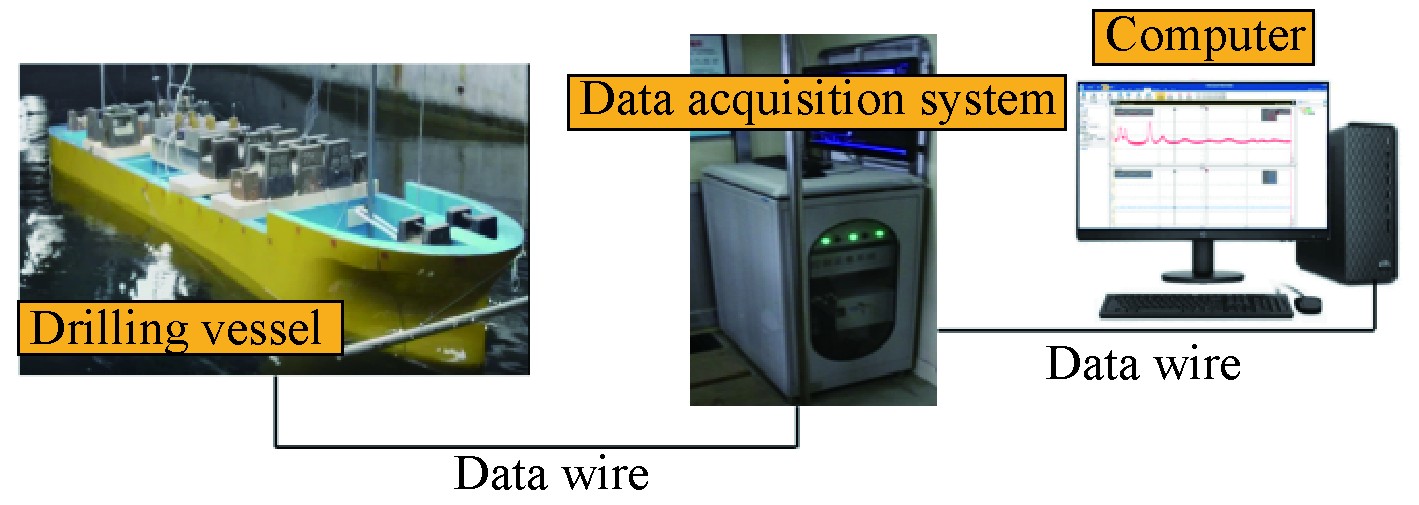
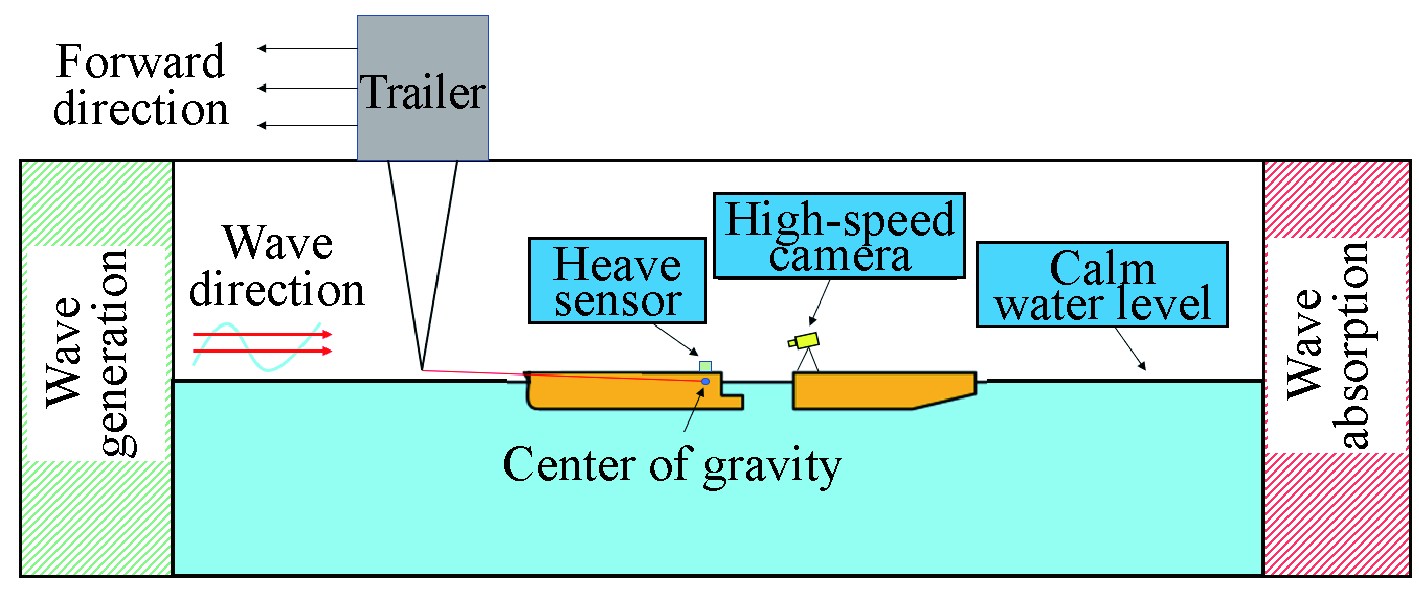
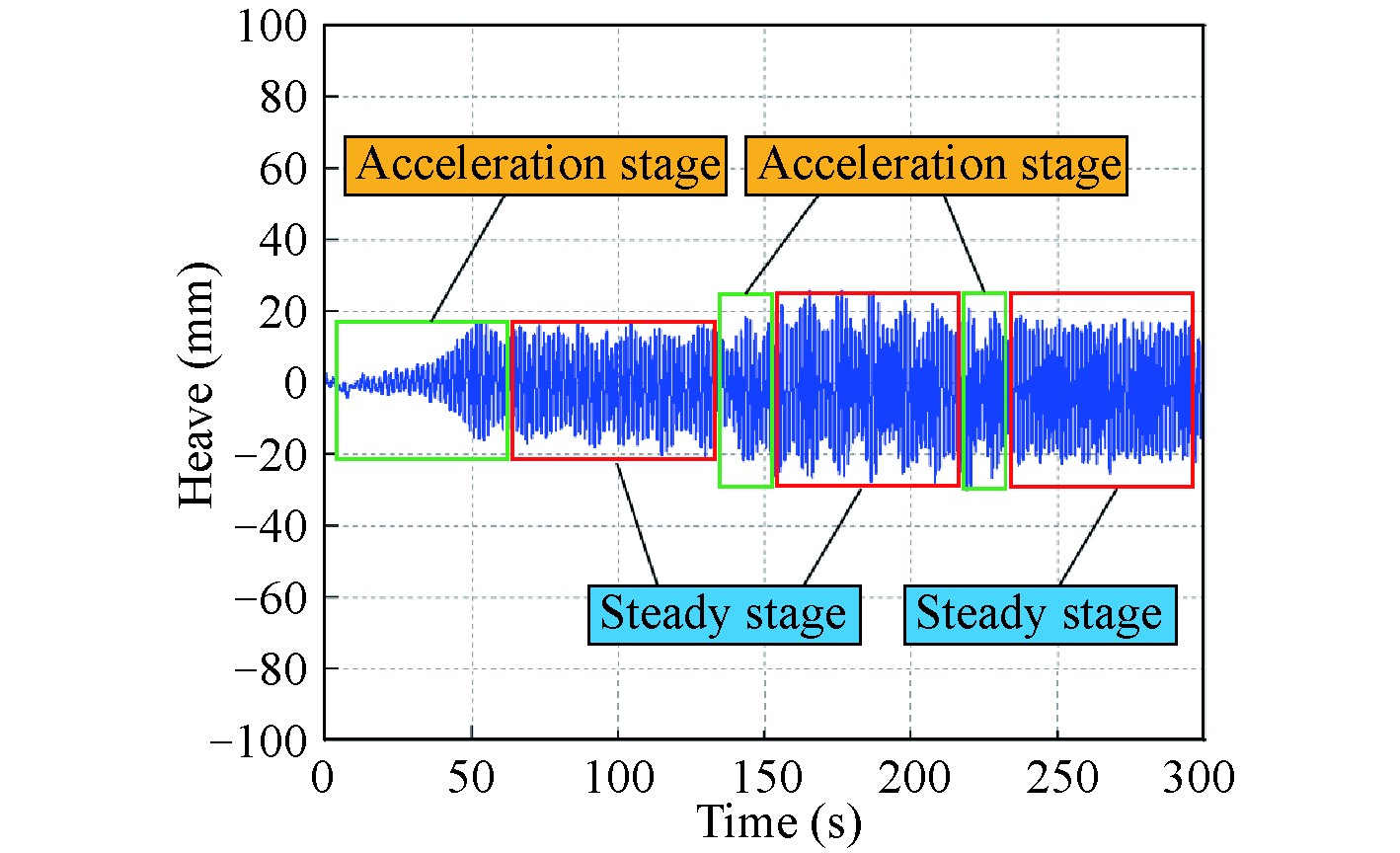
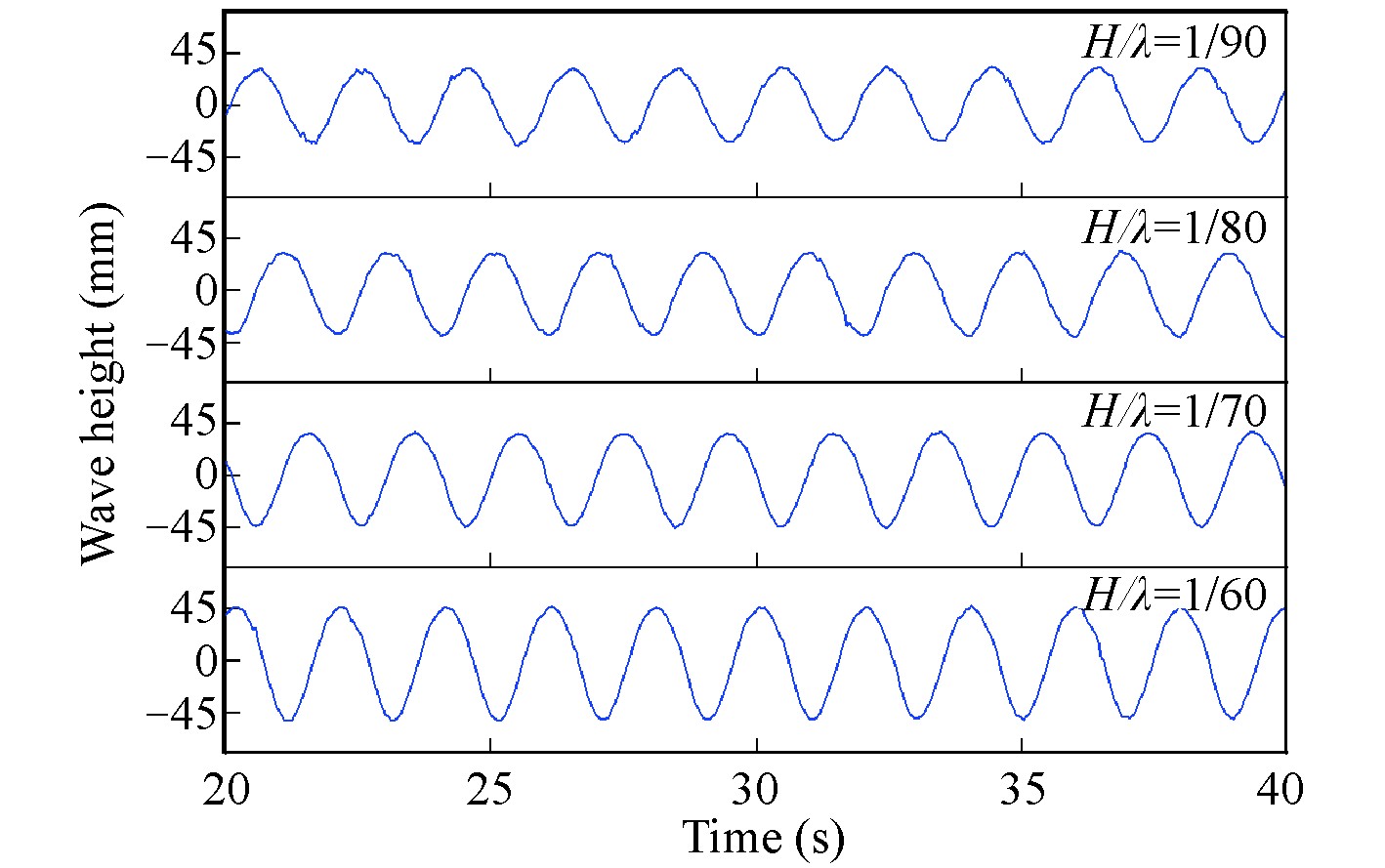
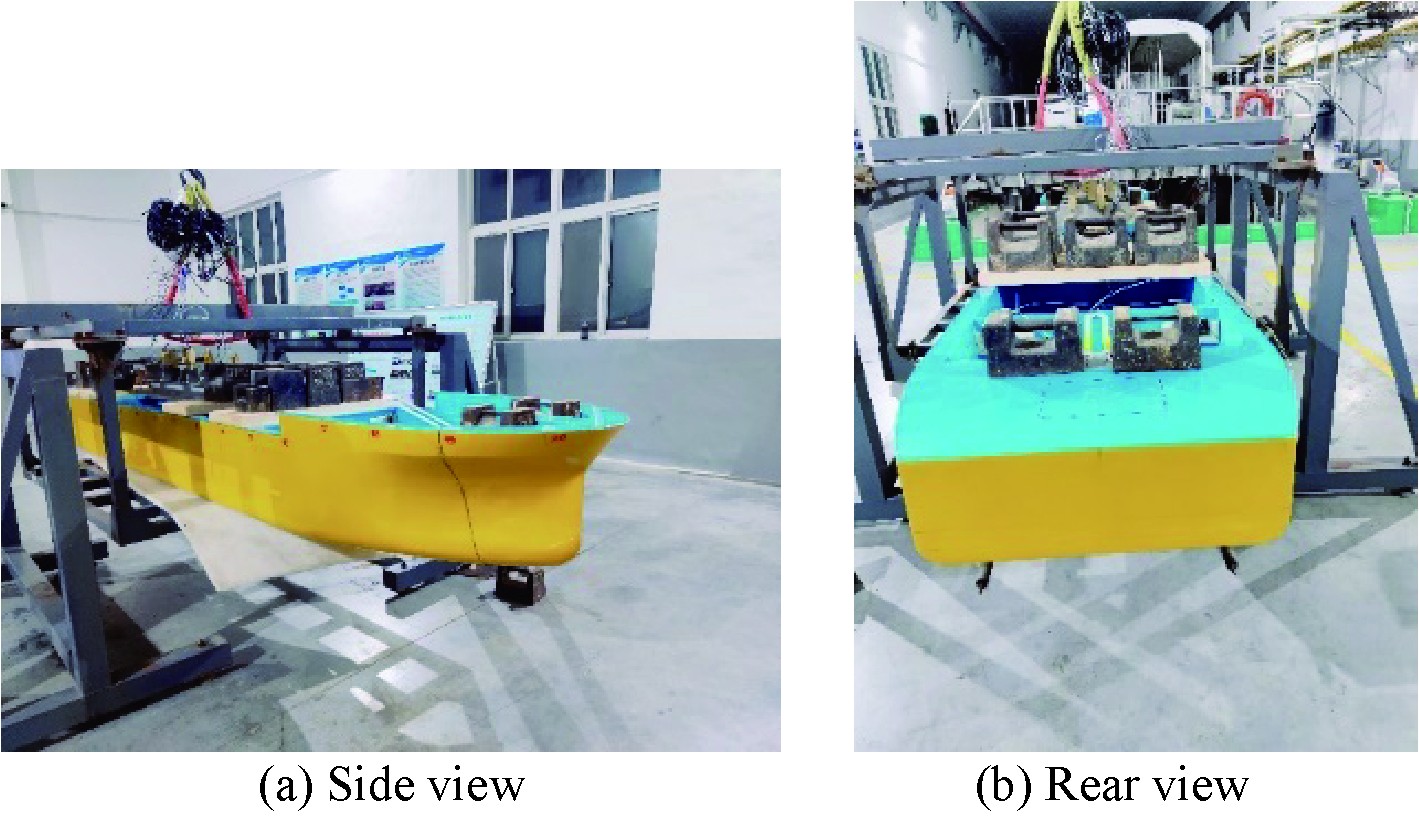
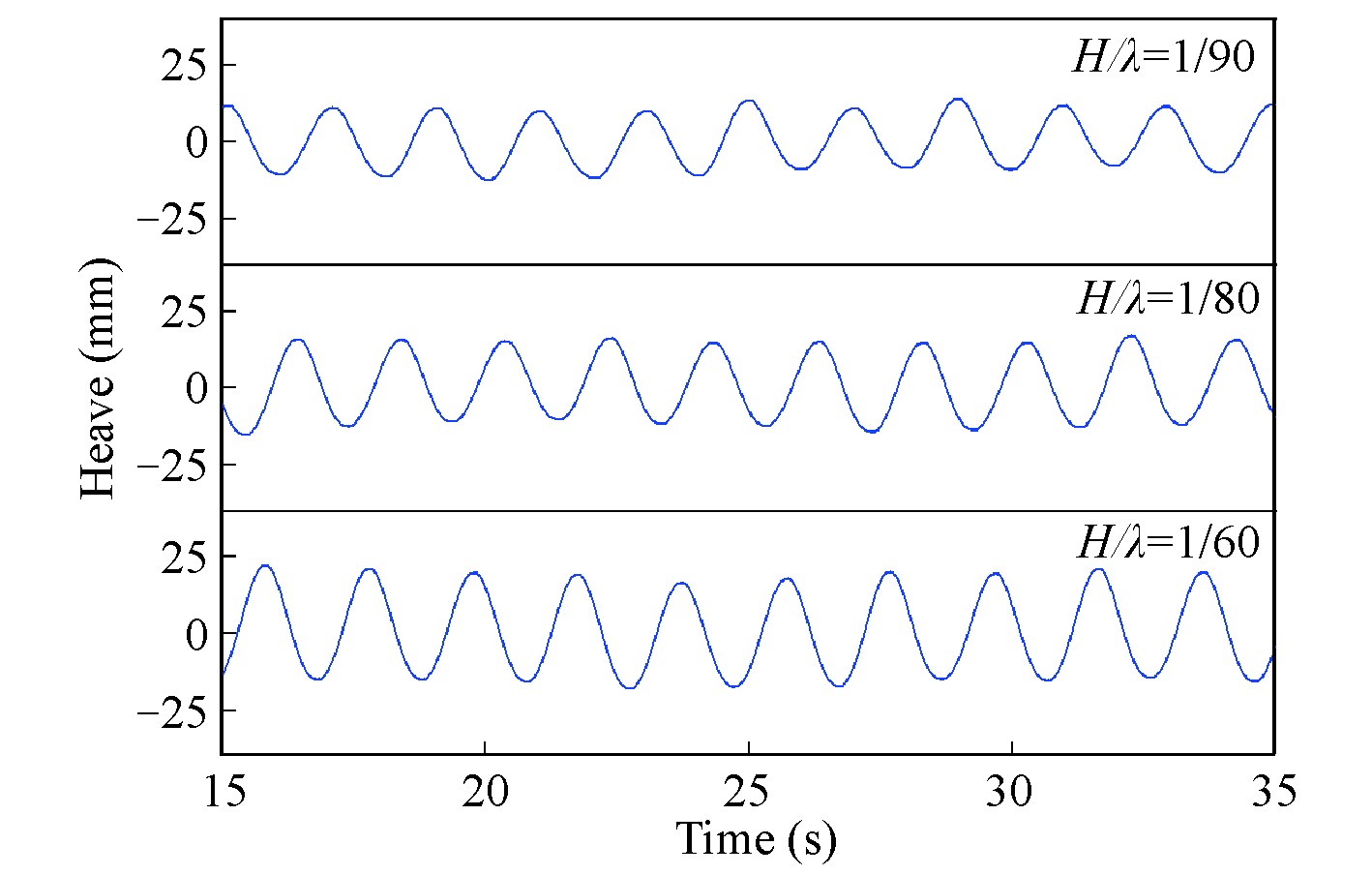
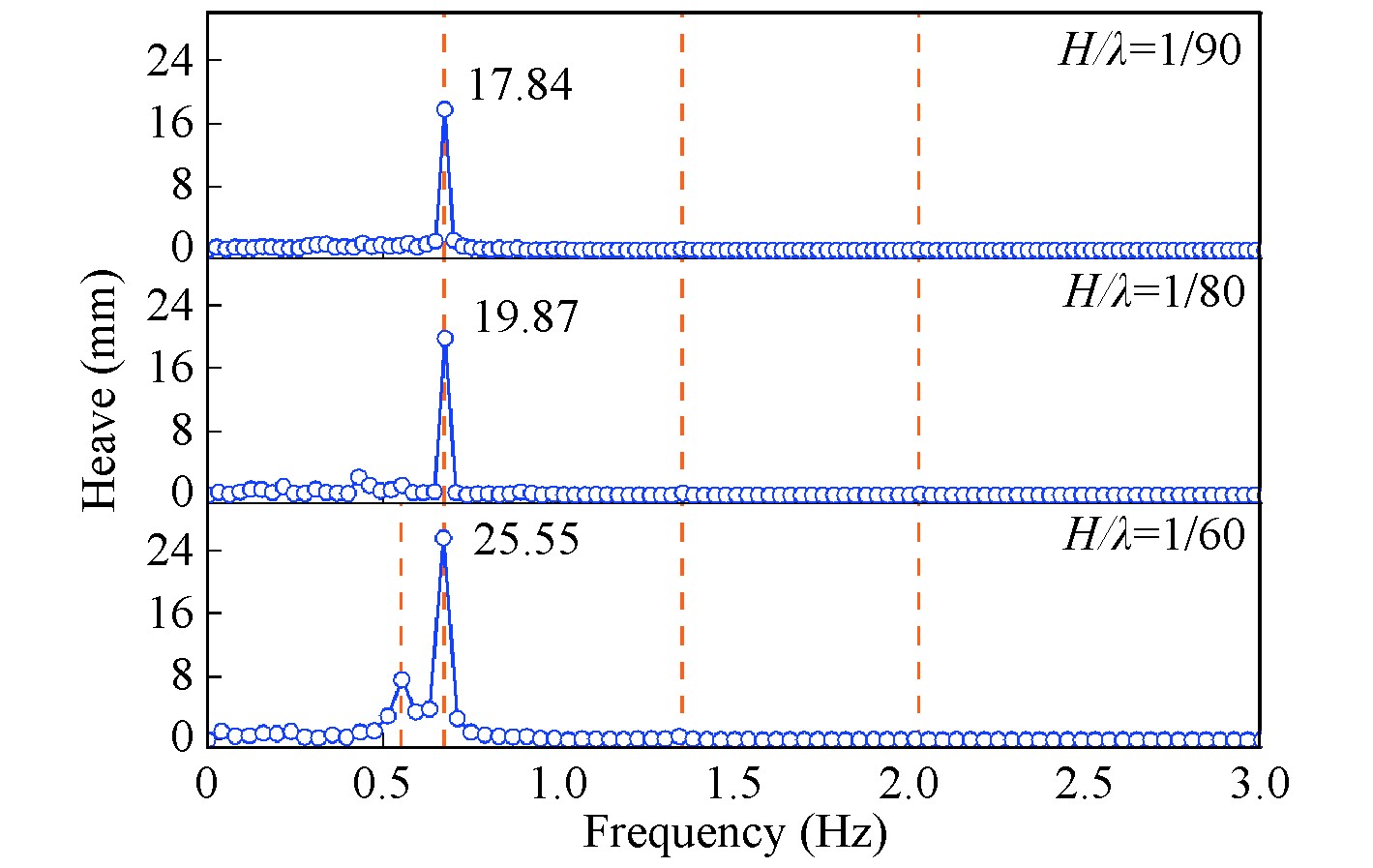
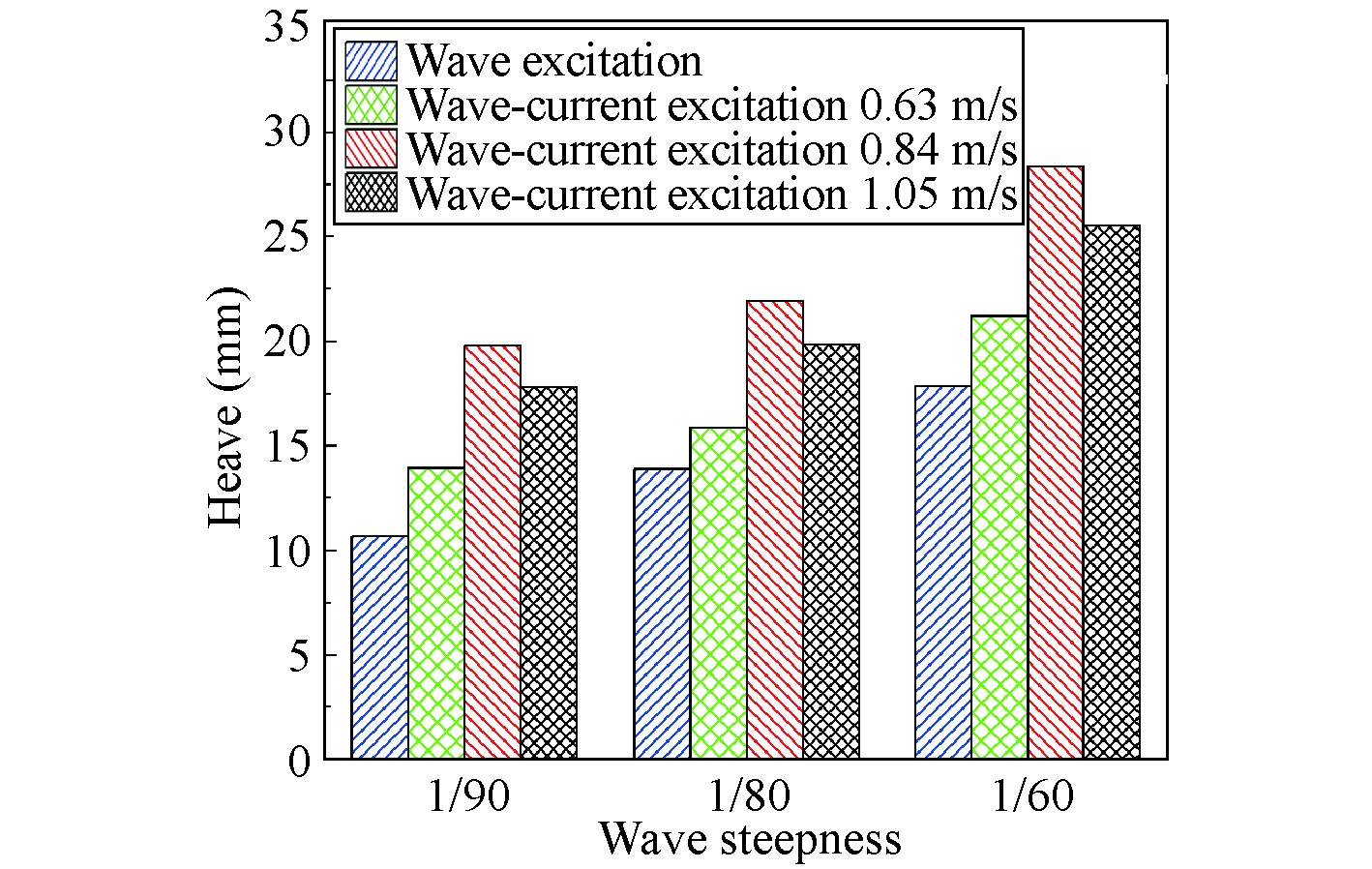
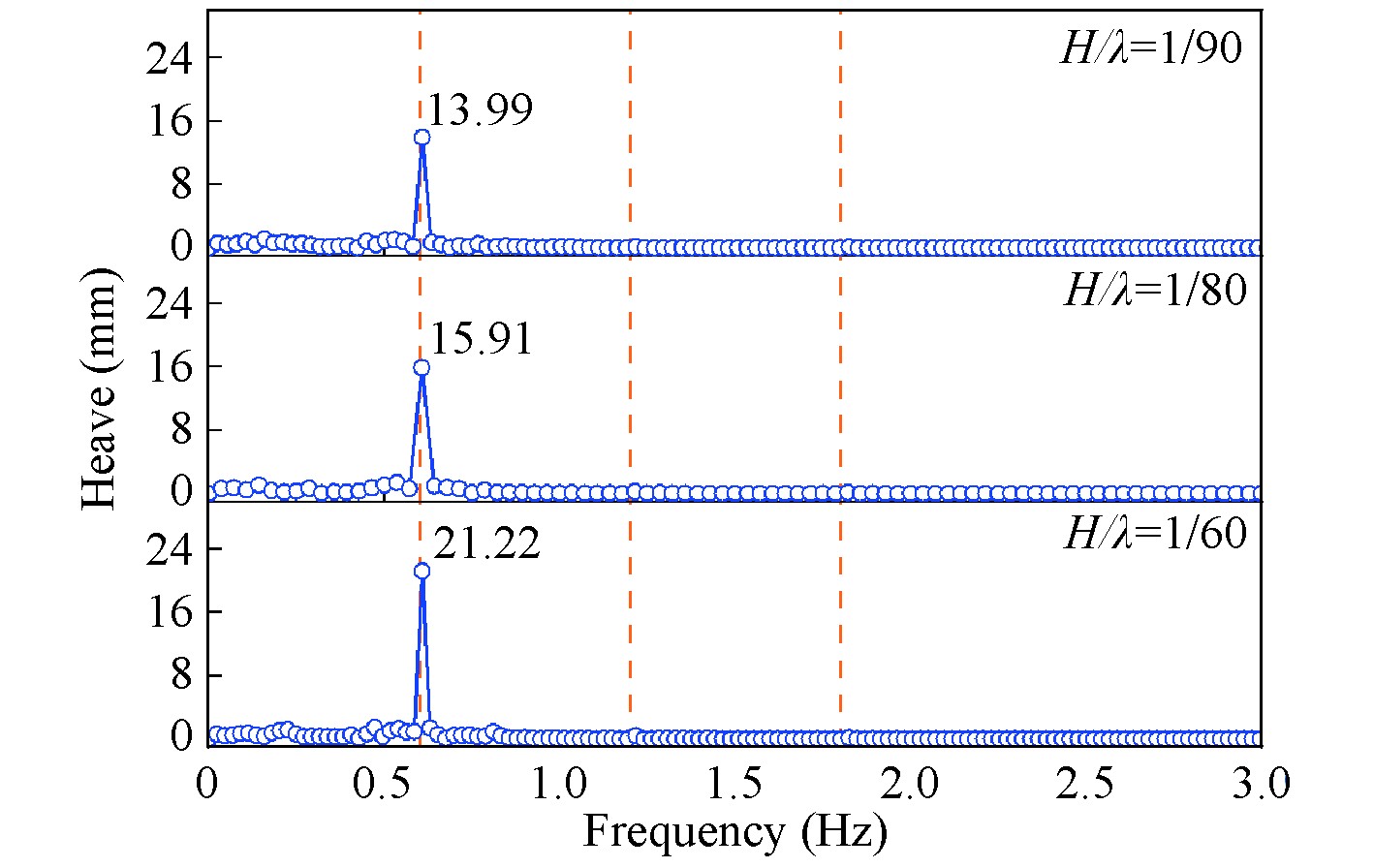
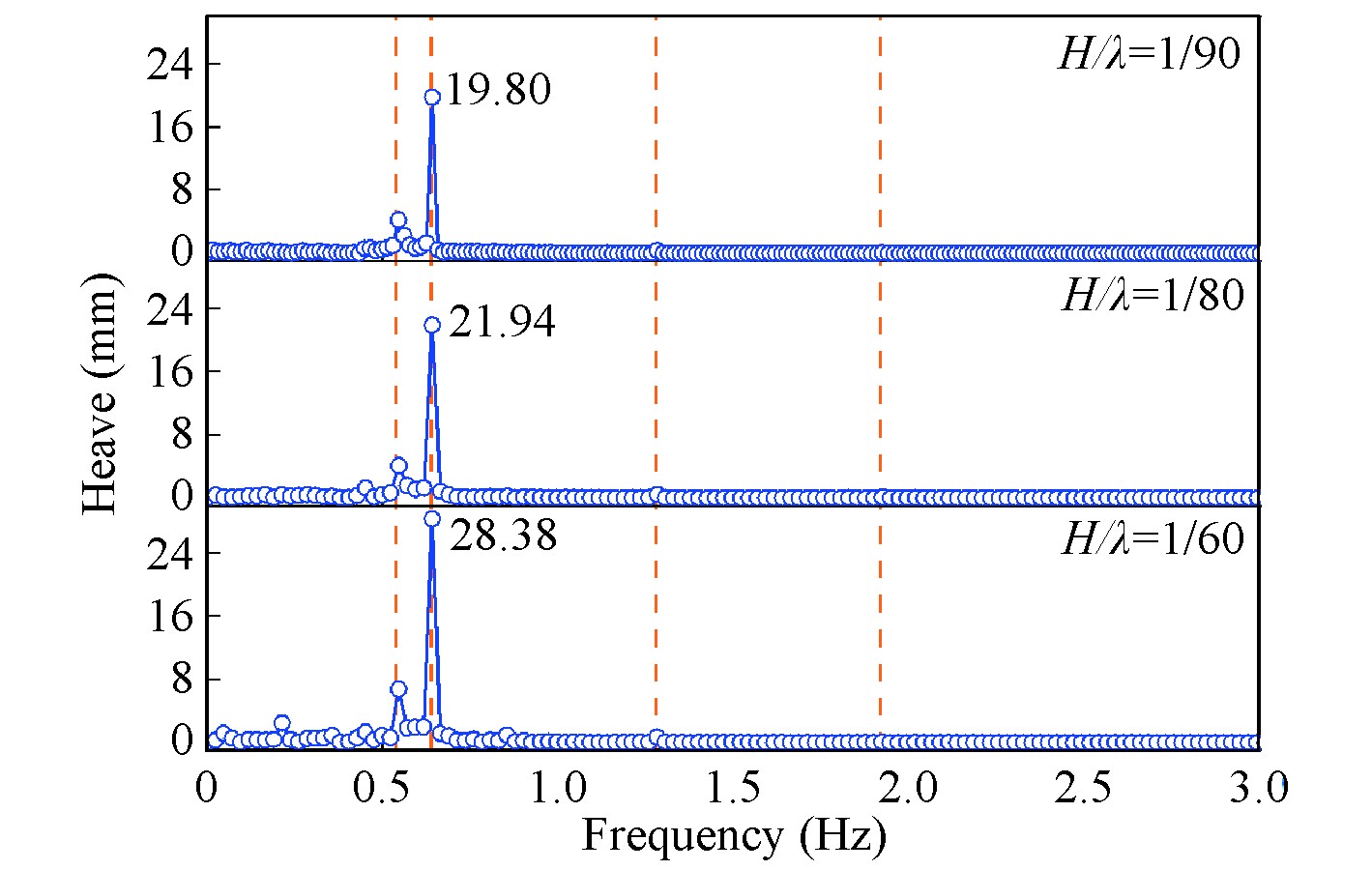
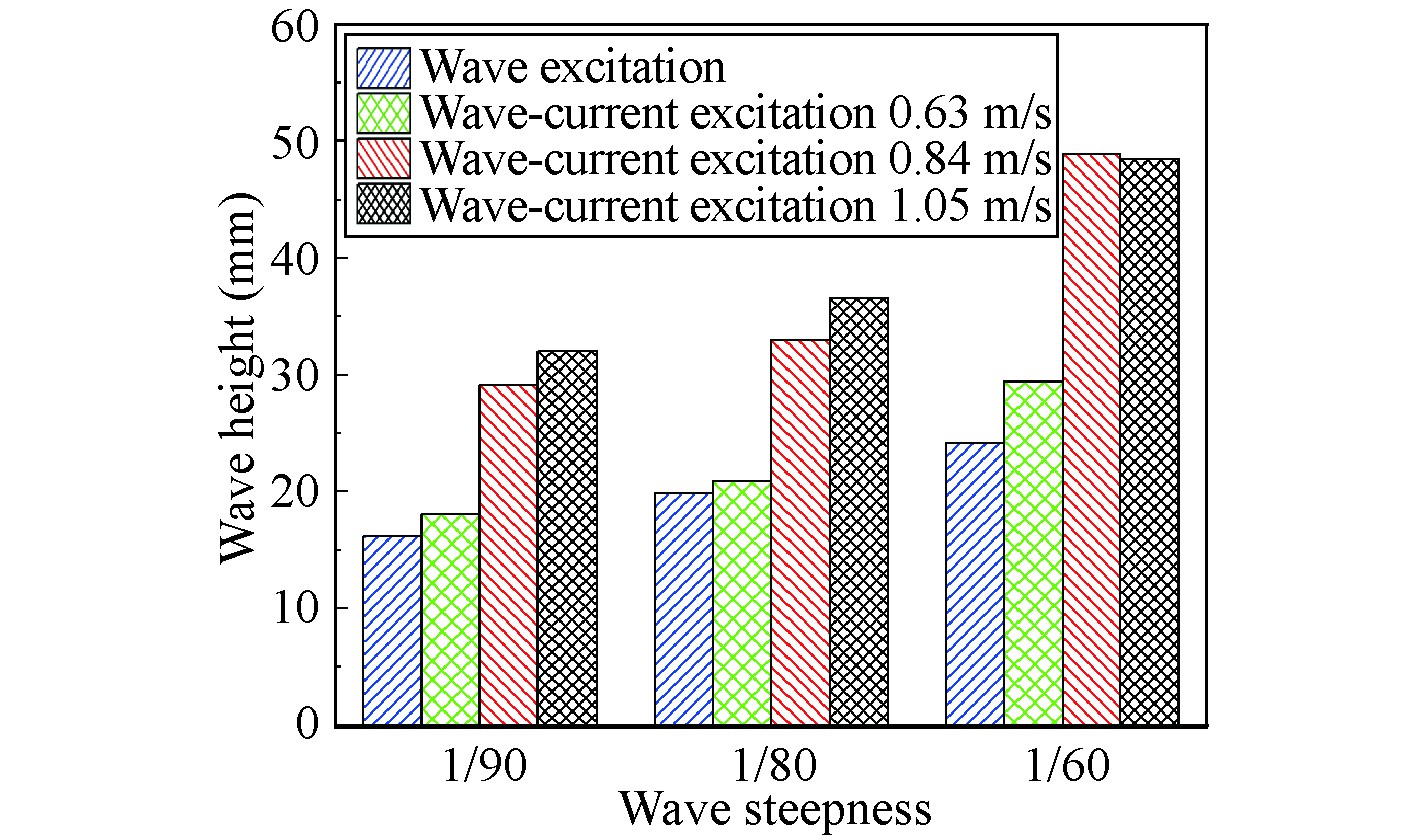
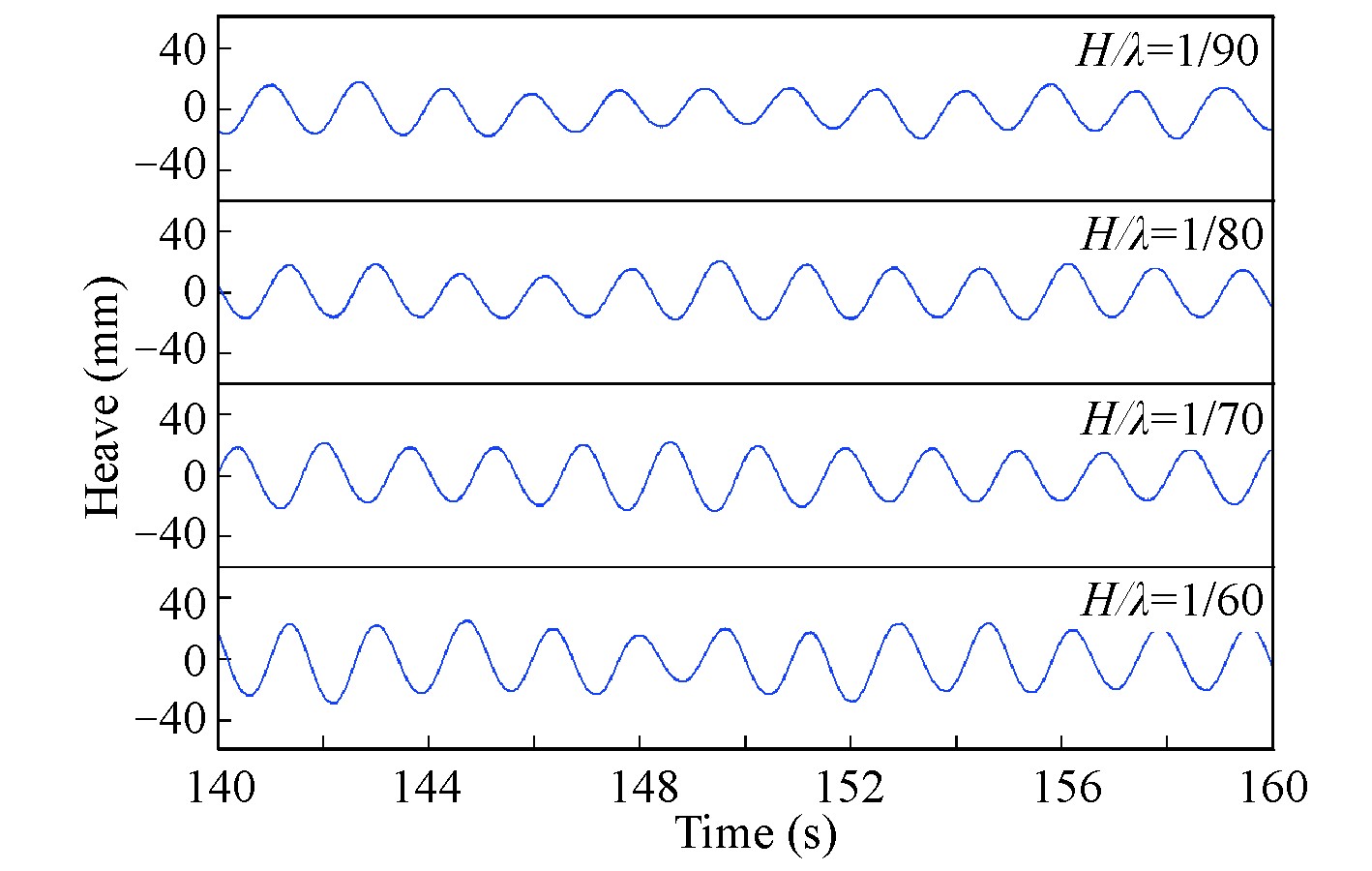
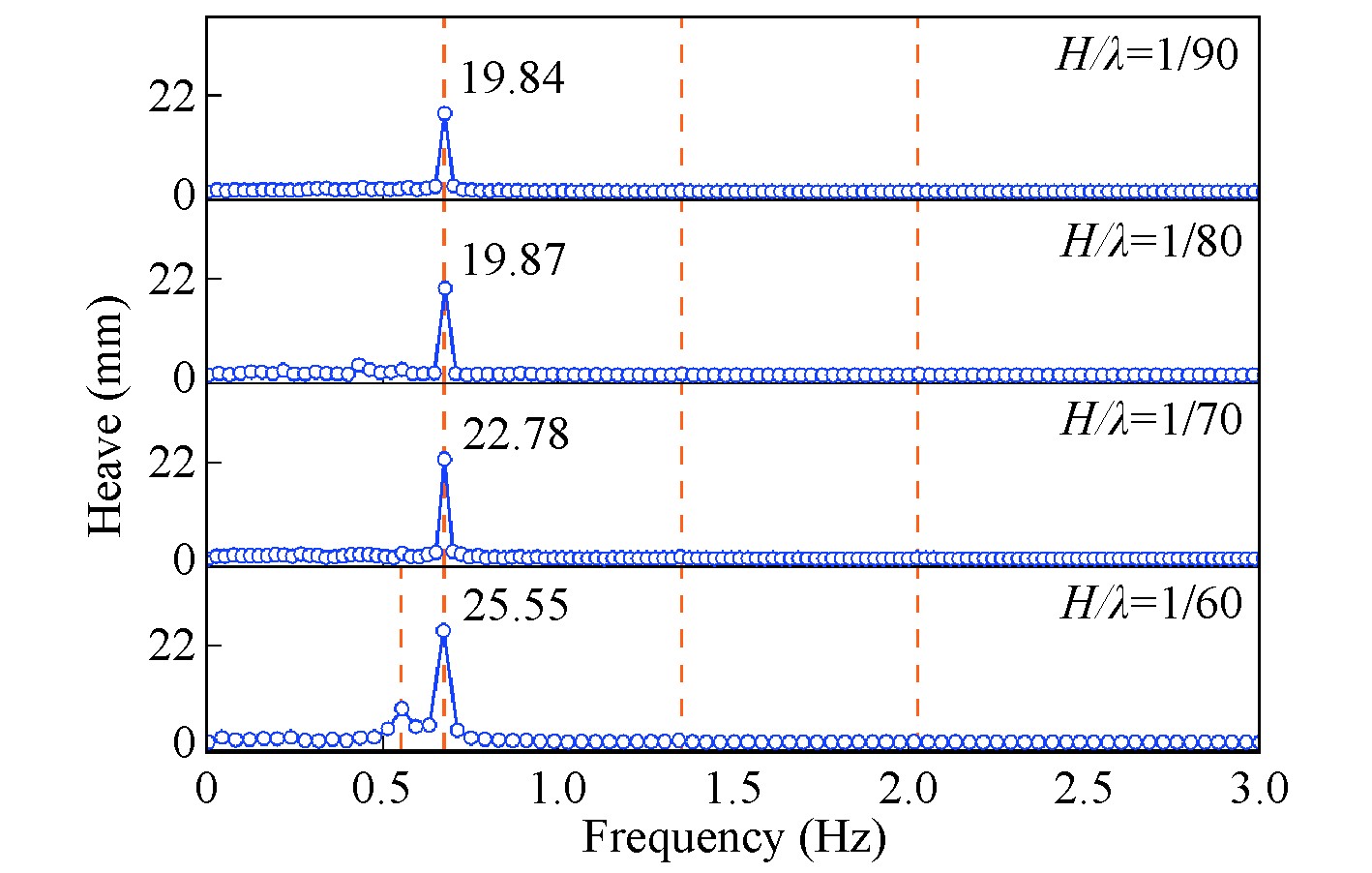
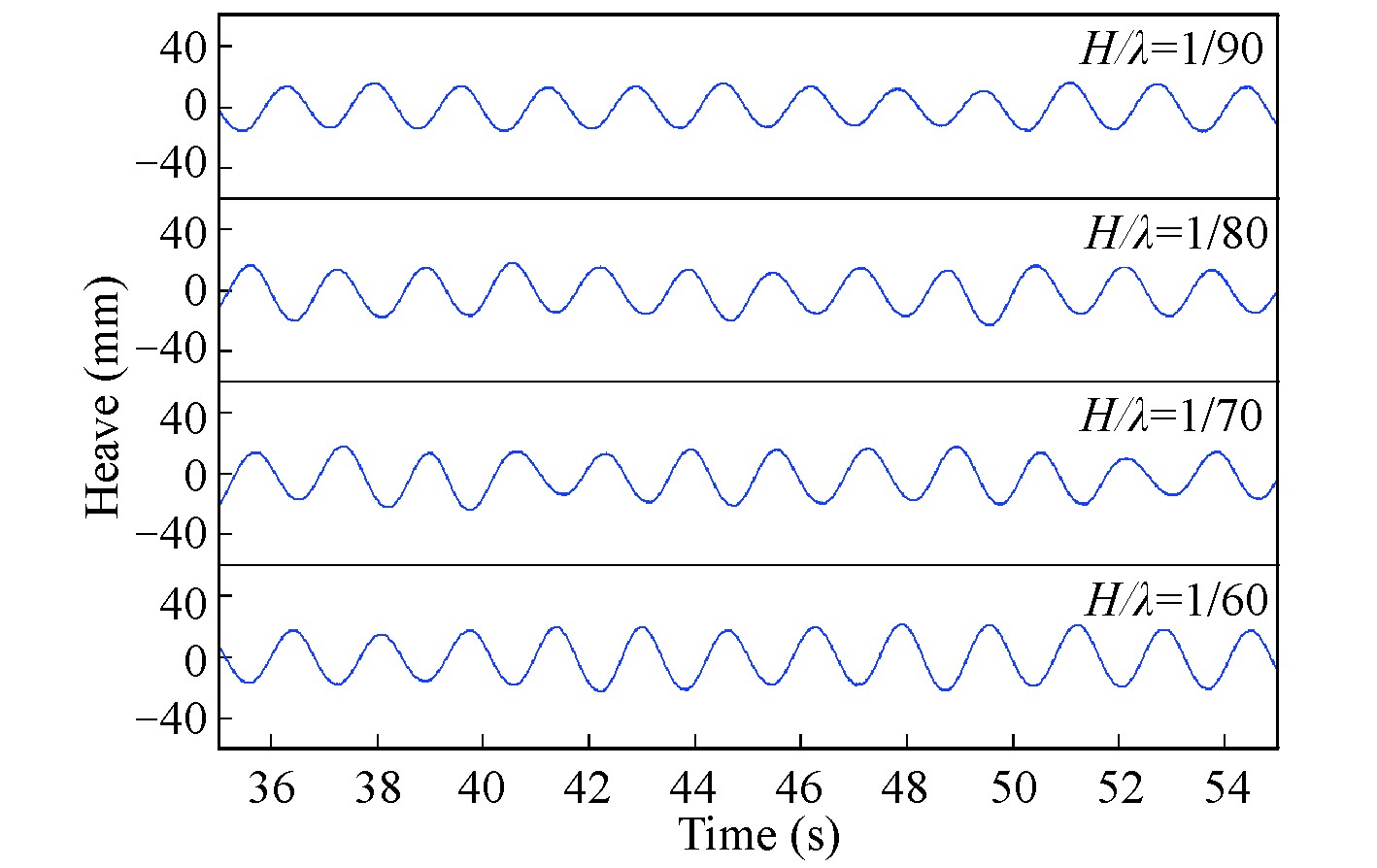
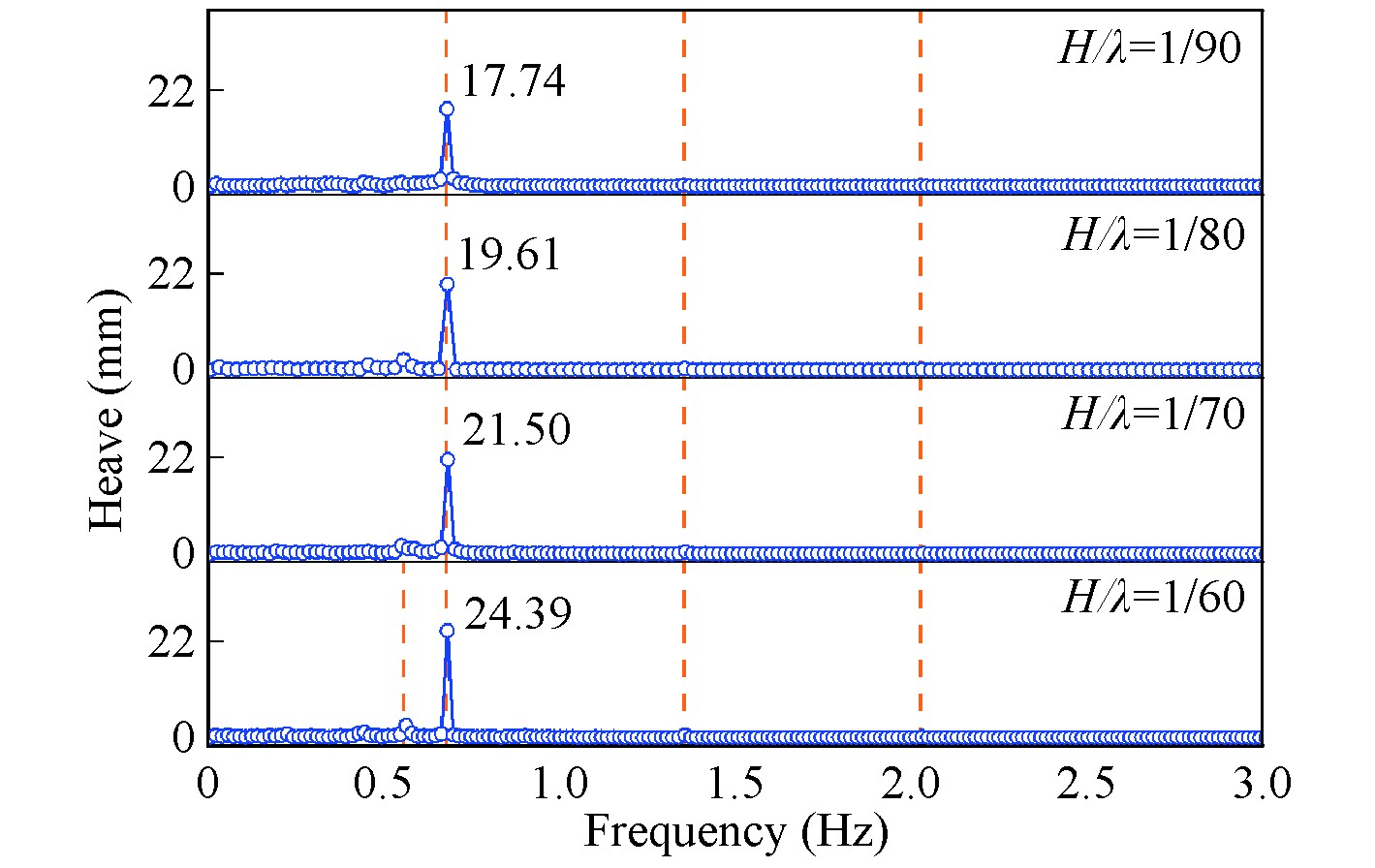
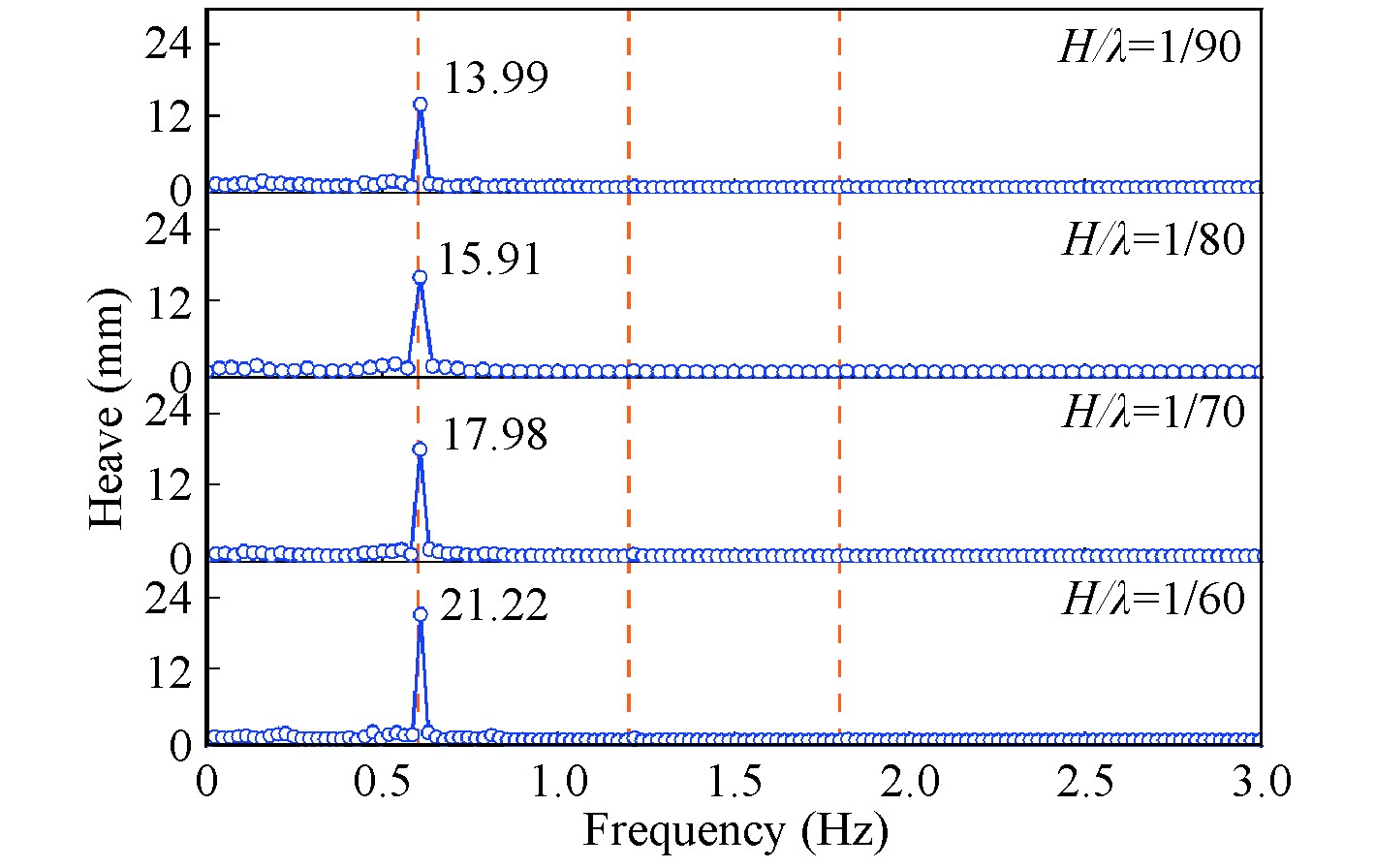
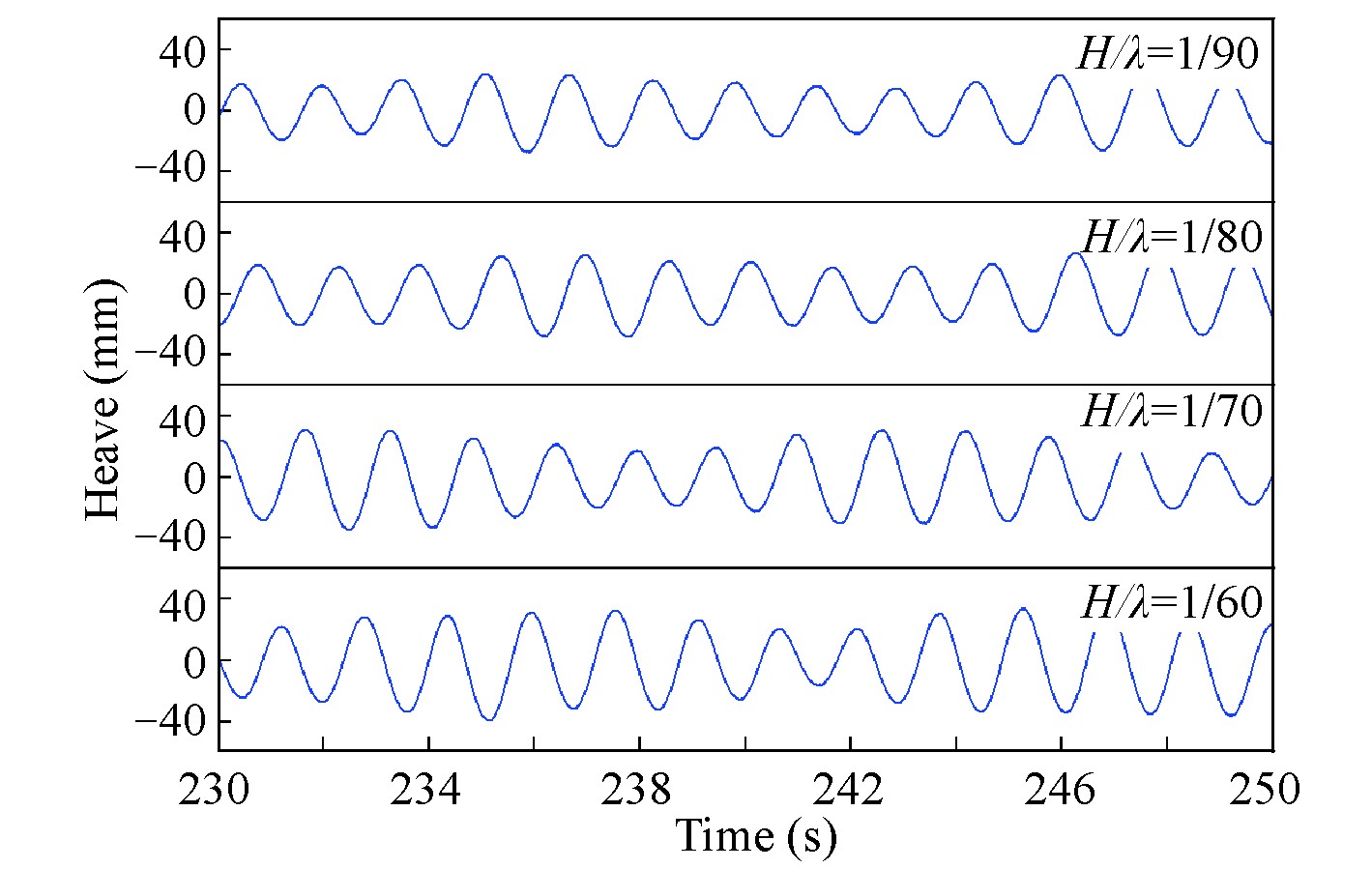
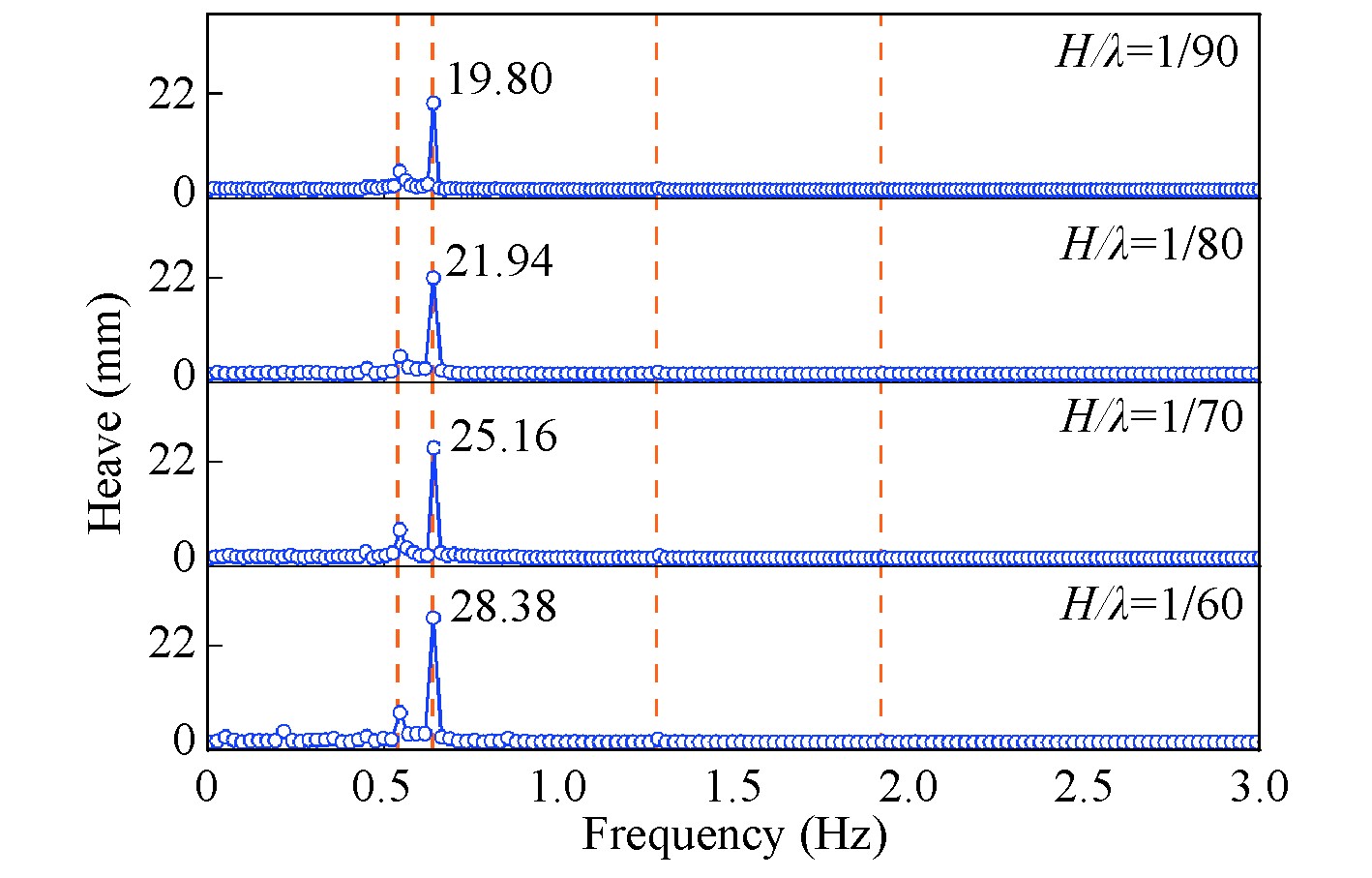
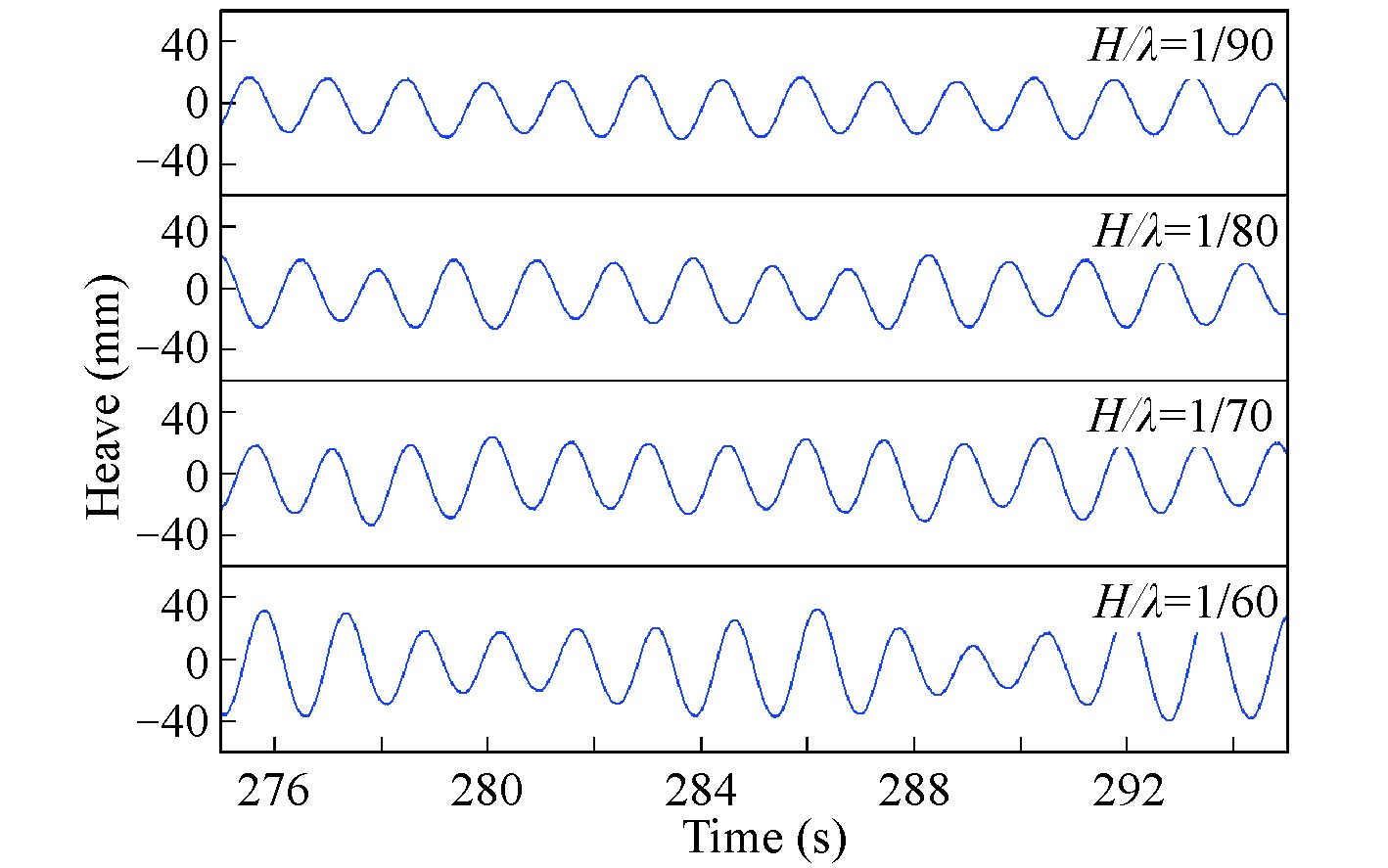
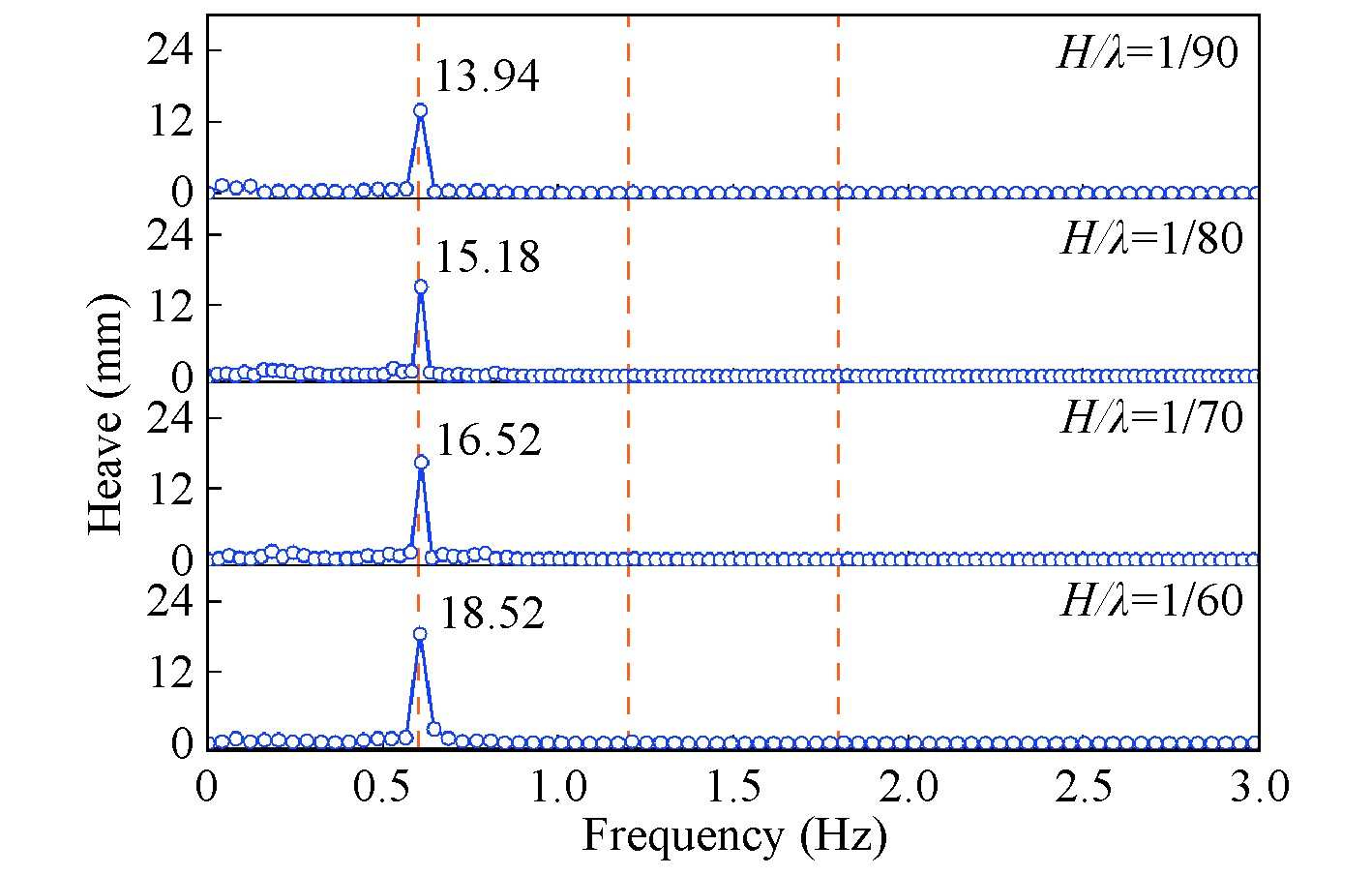
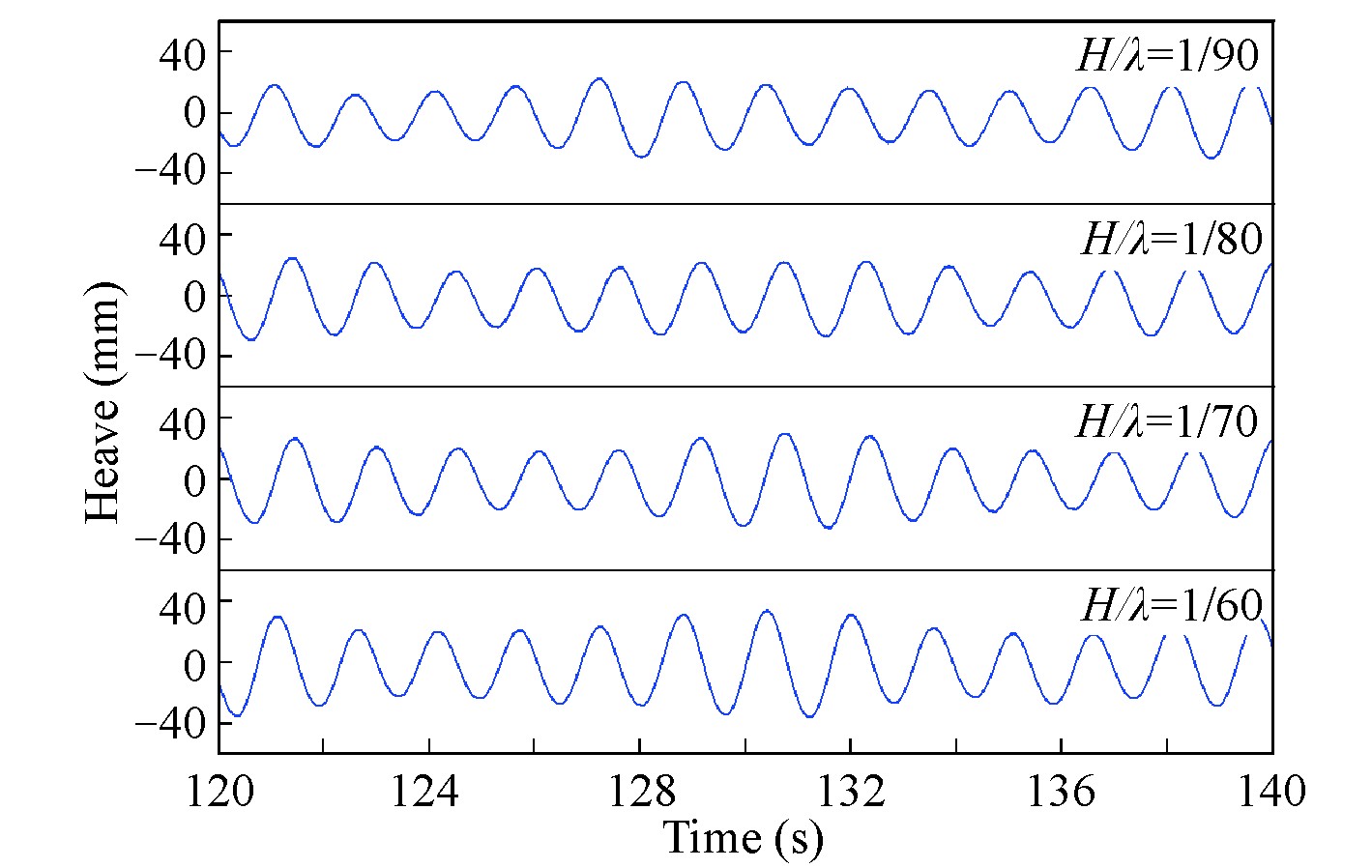
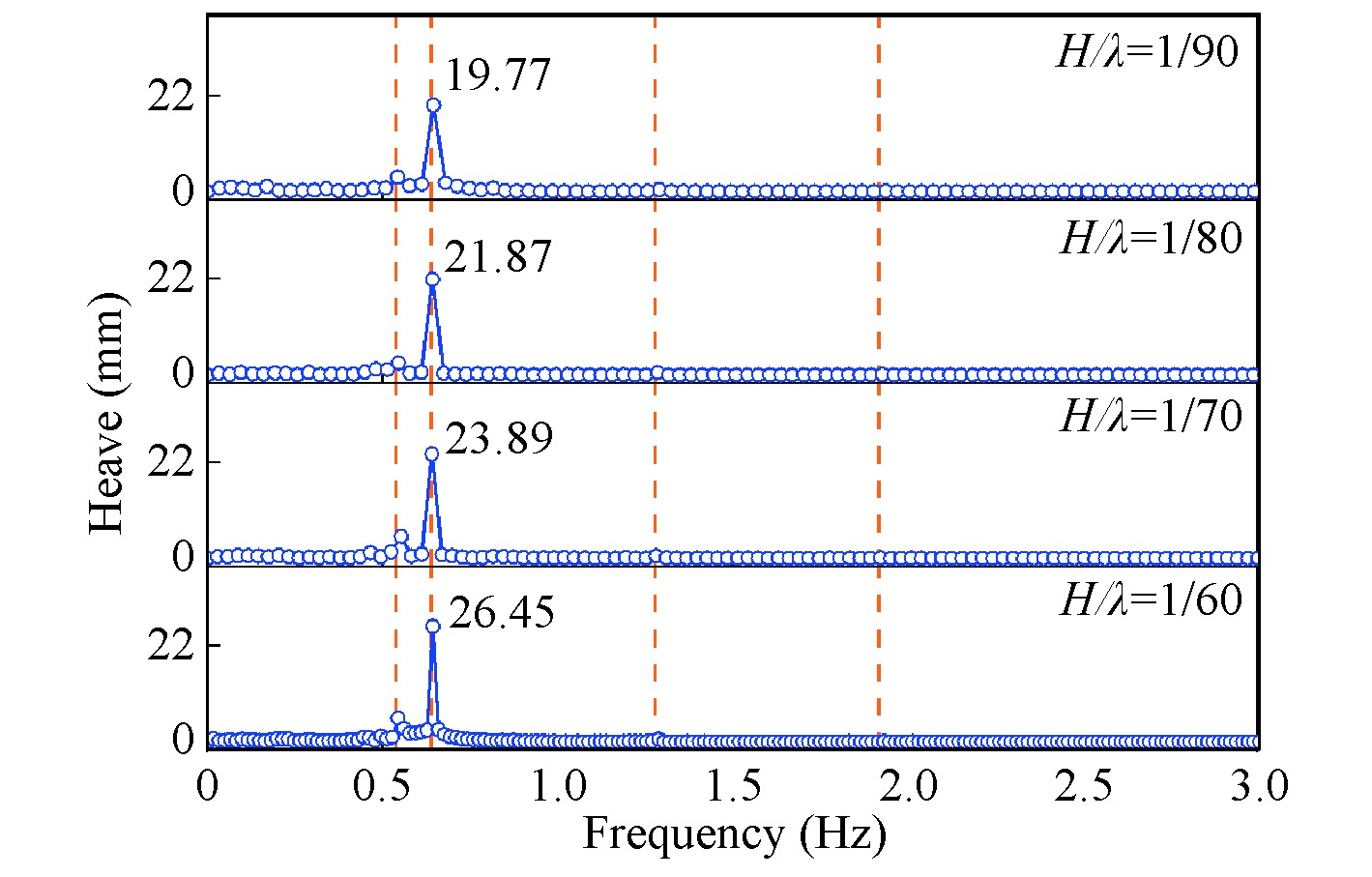
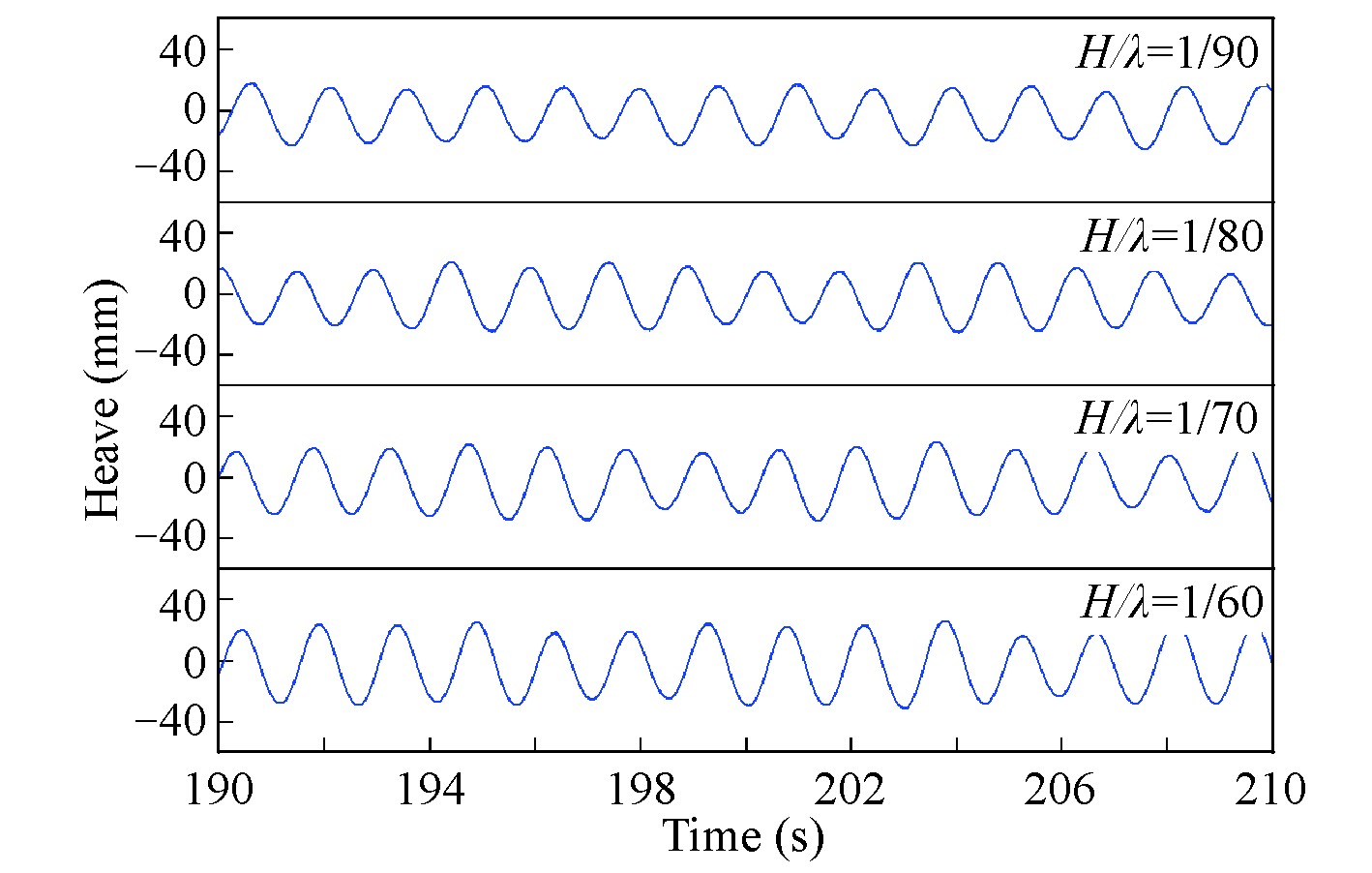
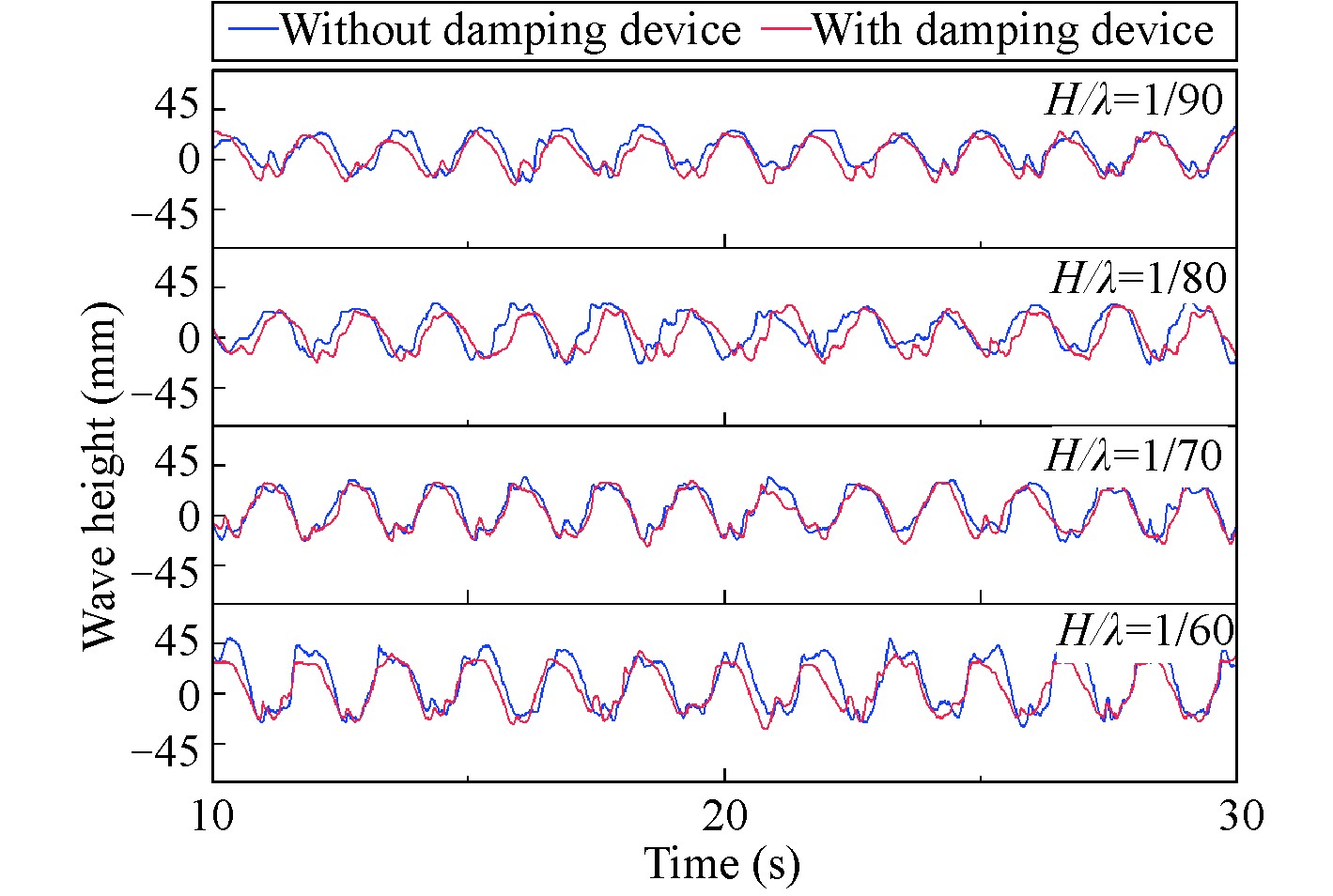
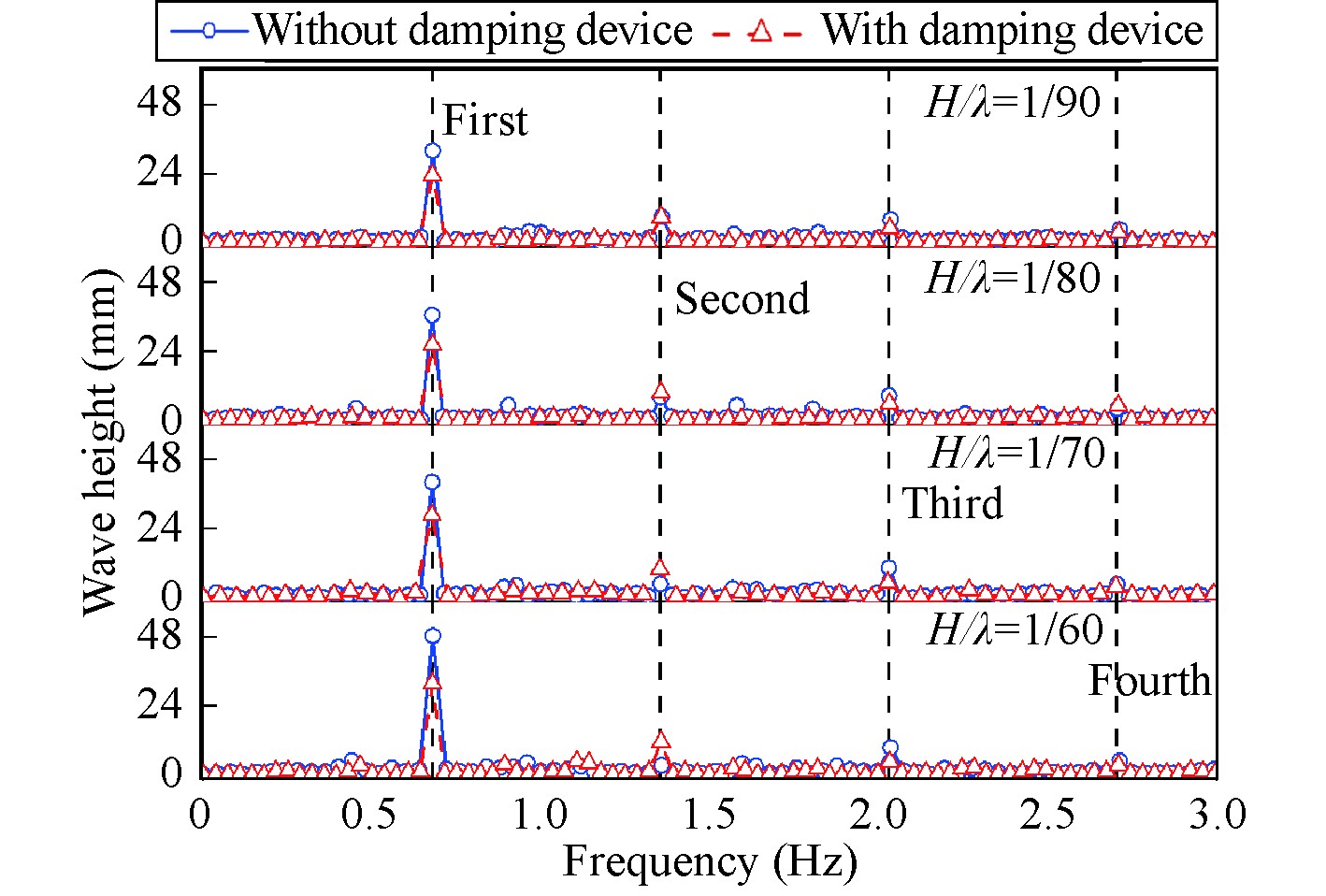
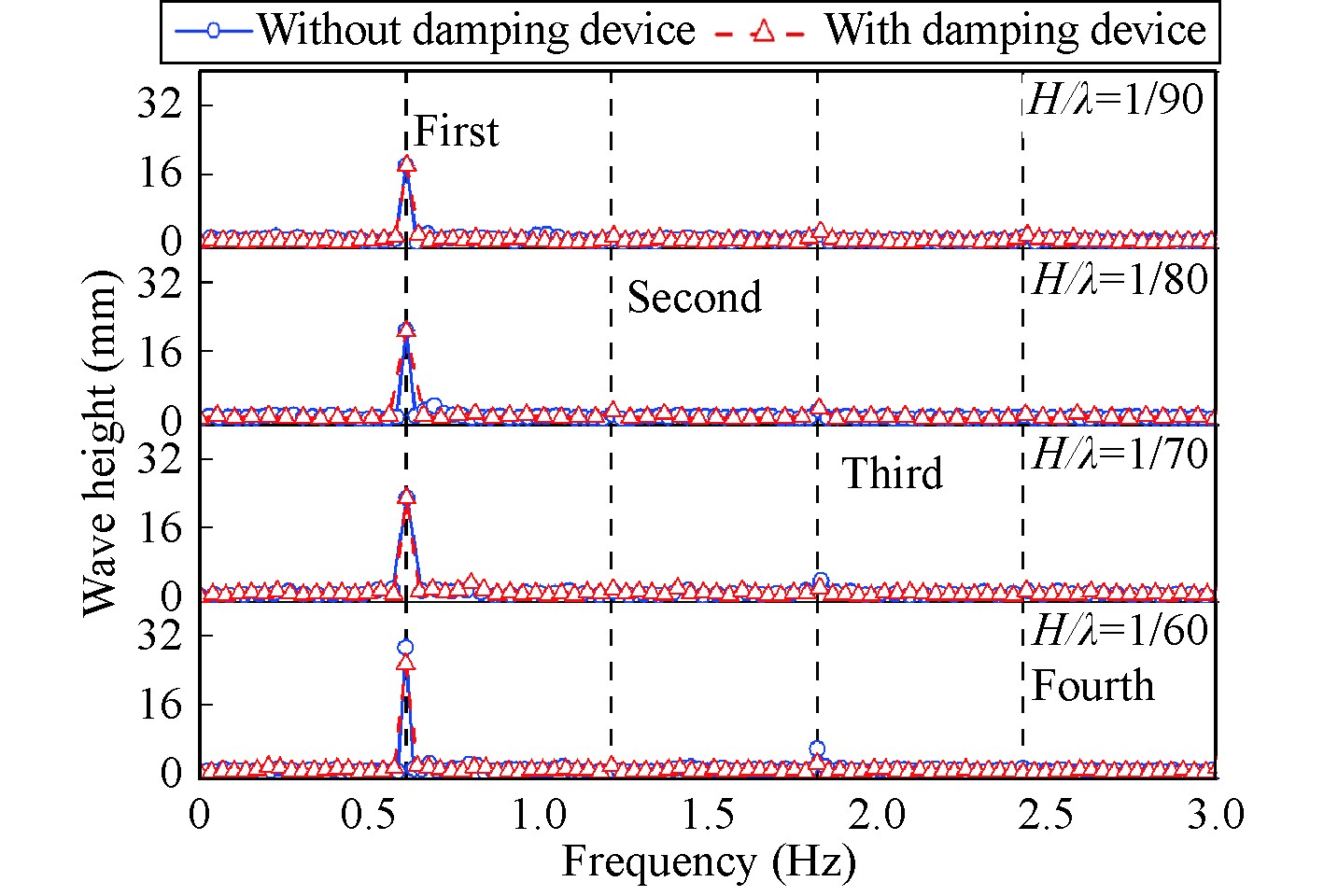
On the basis of the model tests, this paper explores the coupled hydrodynamic performance of the moonpool and the hull. This study aims to compare and analyze the variation in the hull heave response between the piston resonance state of the moonpool under wave excitation and the non-resonance state of the moonpool under wave-current excitation. A novel damping device specifically designed and fabricated for stepped moonpools has been developed. Before and after the installation of the damping device, the free surface response characteristics of the moonpool and heave motion response characteristics of the hull are compared. The findings show a clear correlation between the current speed and heave response characteristics of the hull. During the seakeeping design phase of the drilling vessel, the current speed is an additional critical factor that cannot be disregarded, alongside the moonpool effect. A correlation exists between the fluid dynamics occurring within the moonpool and the heave motion of the vessel hull. A reduction in the amplitude of the motion of the moonpool water results in a decrease in the heave motion of the hull. This study provides a reference for alleviating the seakeeping of a drill ship’s heave response and enhancing the safety and efficiency of the operation.
On the basis of the model tests, this paper explores the coupled hydrodynamic performance of the moonpool and the hull. This study aims to compare and analyze the variation in the hull heave response between the piston resonance state of the moonpool under wave excitation and the non-resonance state of the moonpool under wave-current excitation. A novel damping device specifically designed and fabricated for stepped moonpools has been developed. Before and after the installation of the damping device, the free surface response characteristics of the moonpool and heave motion response characteristics of the hull are compared. The findings show a clear correlation between the current speed and heave response characteristics of the hull. During the seakeeping design phase of the drilling vessel, the current speed is an additional critical factor that cannot be disregarded, alongside the moonpool effect. A correlation exists between the fluid dynamics occurring within the moonpool and the heave motion of the vessel hull. A reduction in the amplitude of the motion of the moonpool water results in a decrease in the heave motion of the hull. This study provides a reference for alleviating the seakeeping of a drill ship’s heave response and enhancing the safety and efficiency of the operation.

2025, 39(2)
:209-224.
doi: 10.1007/s13344-025-0016-7
Abstract:
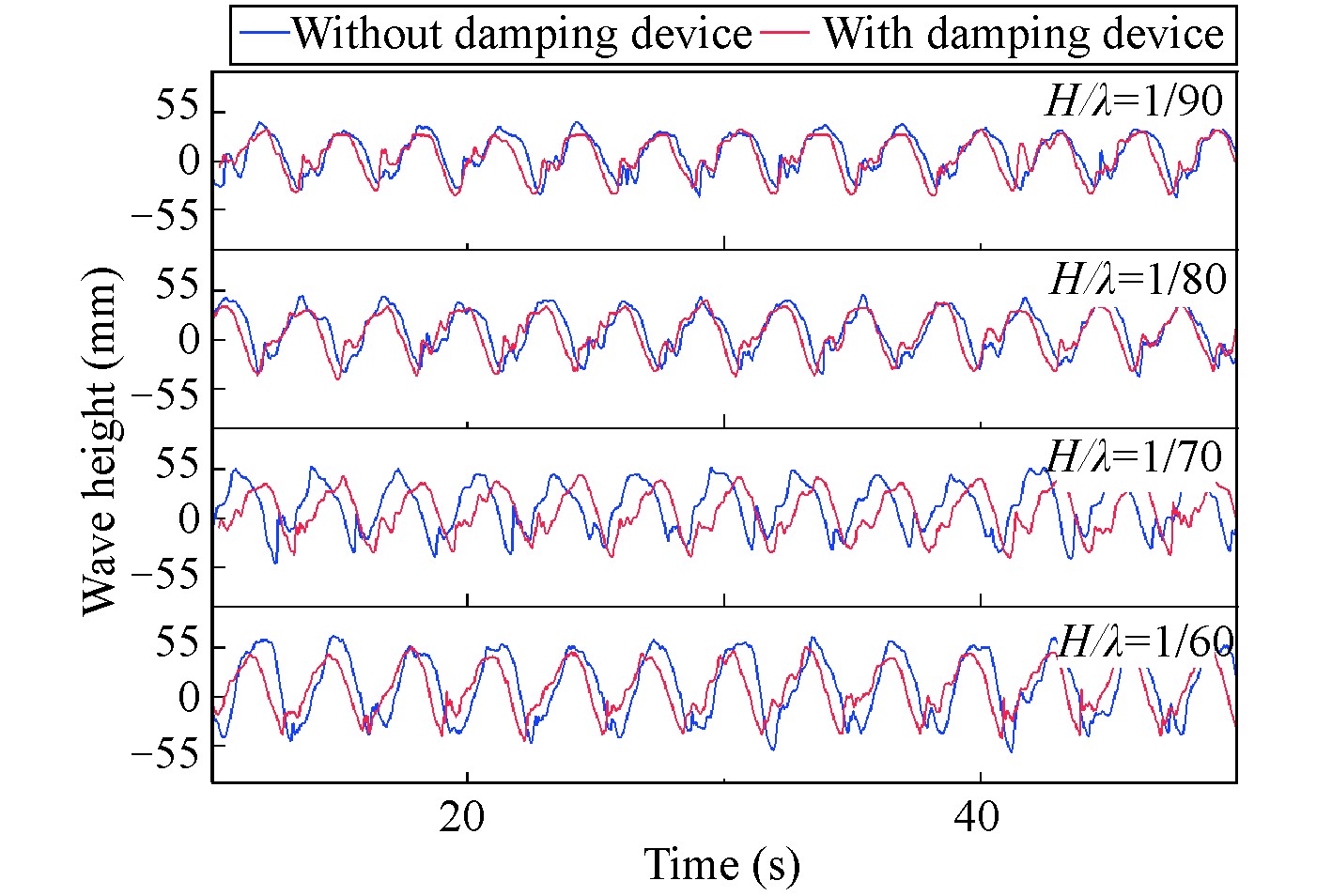
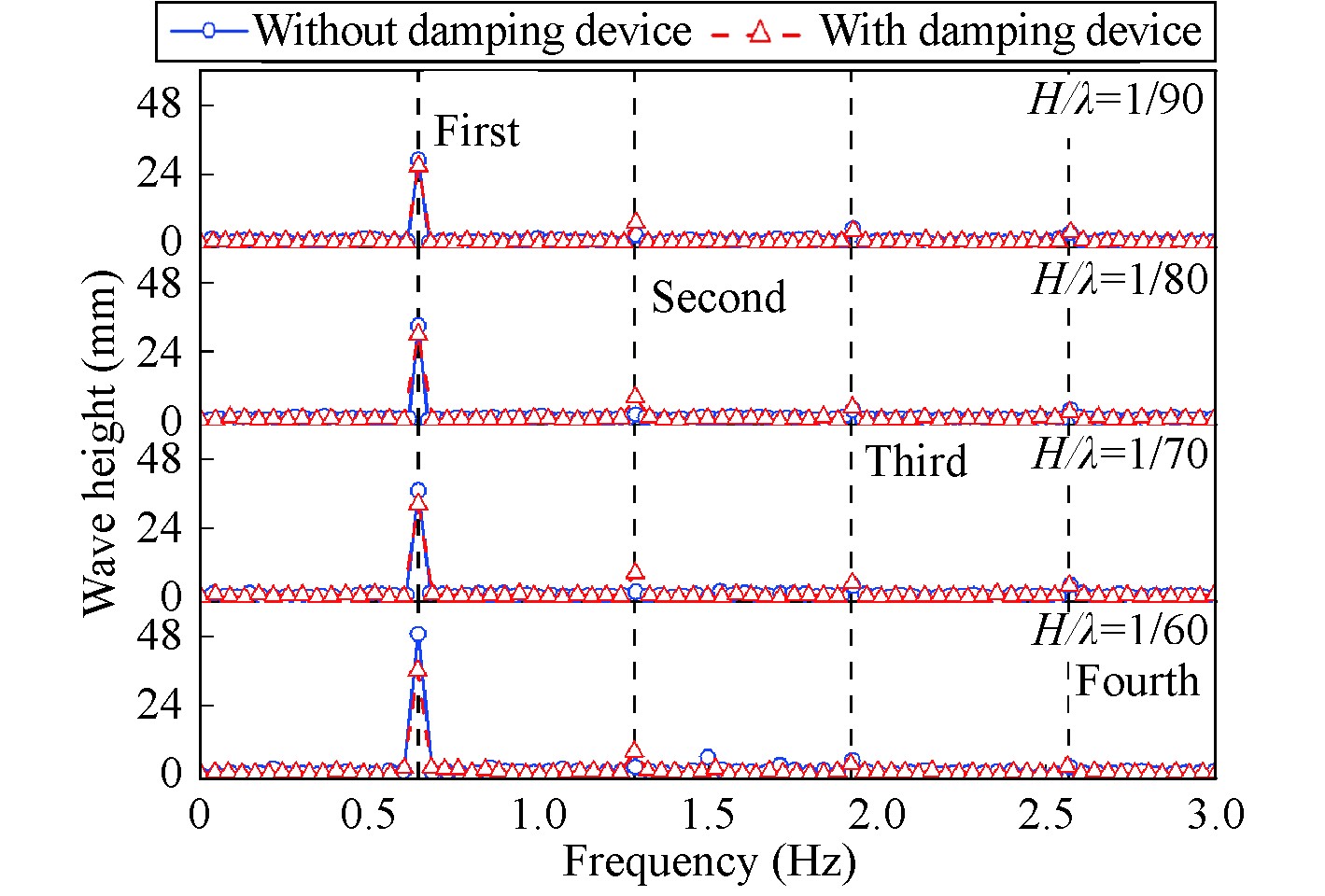
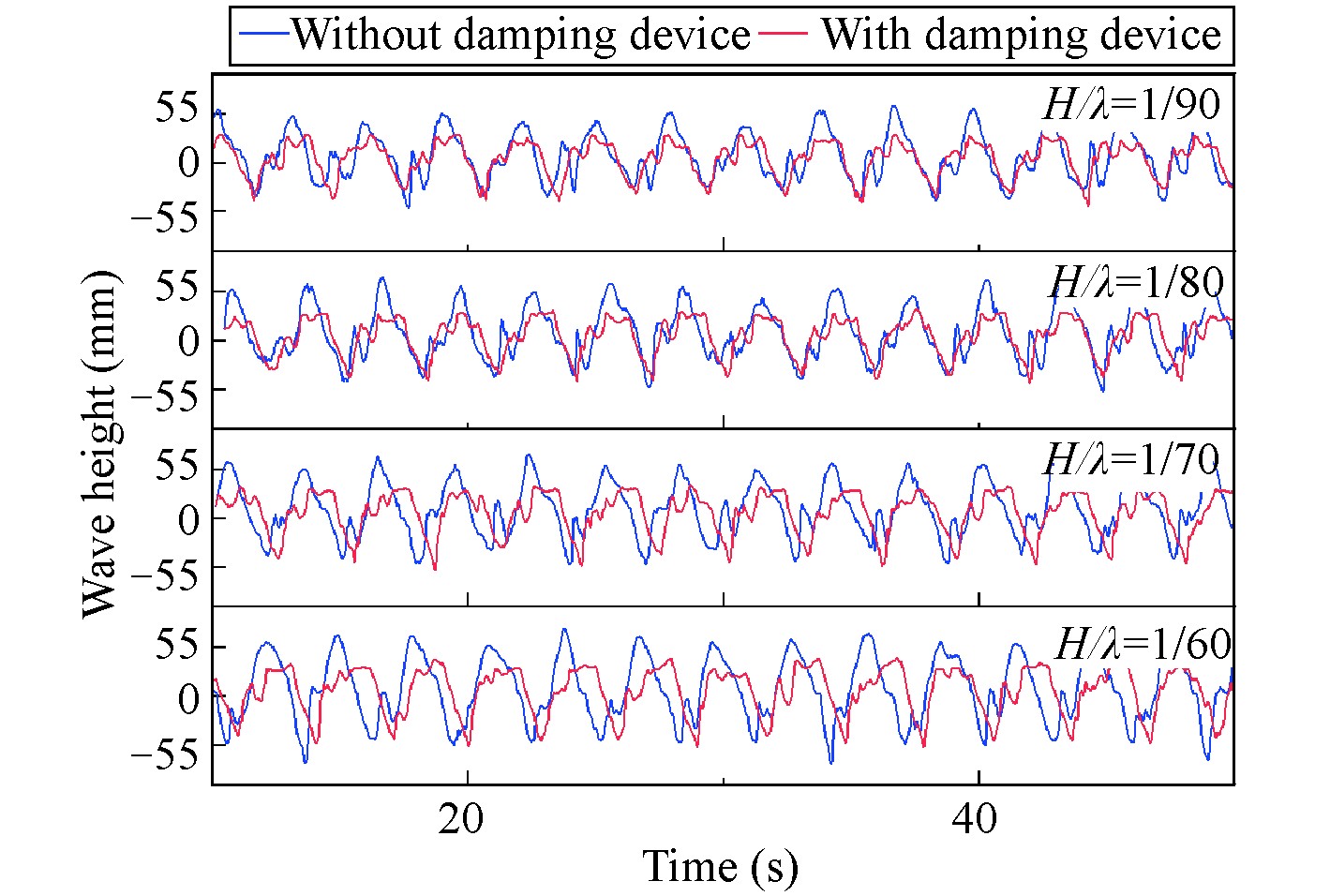
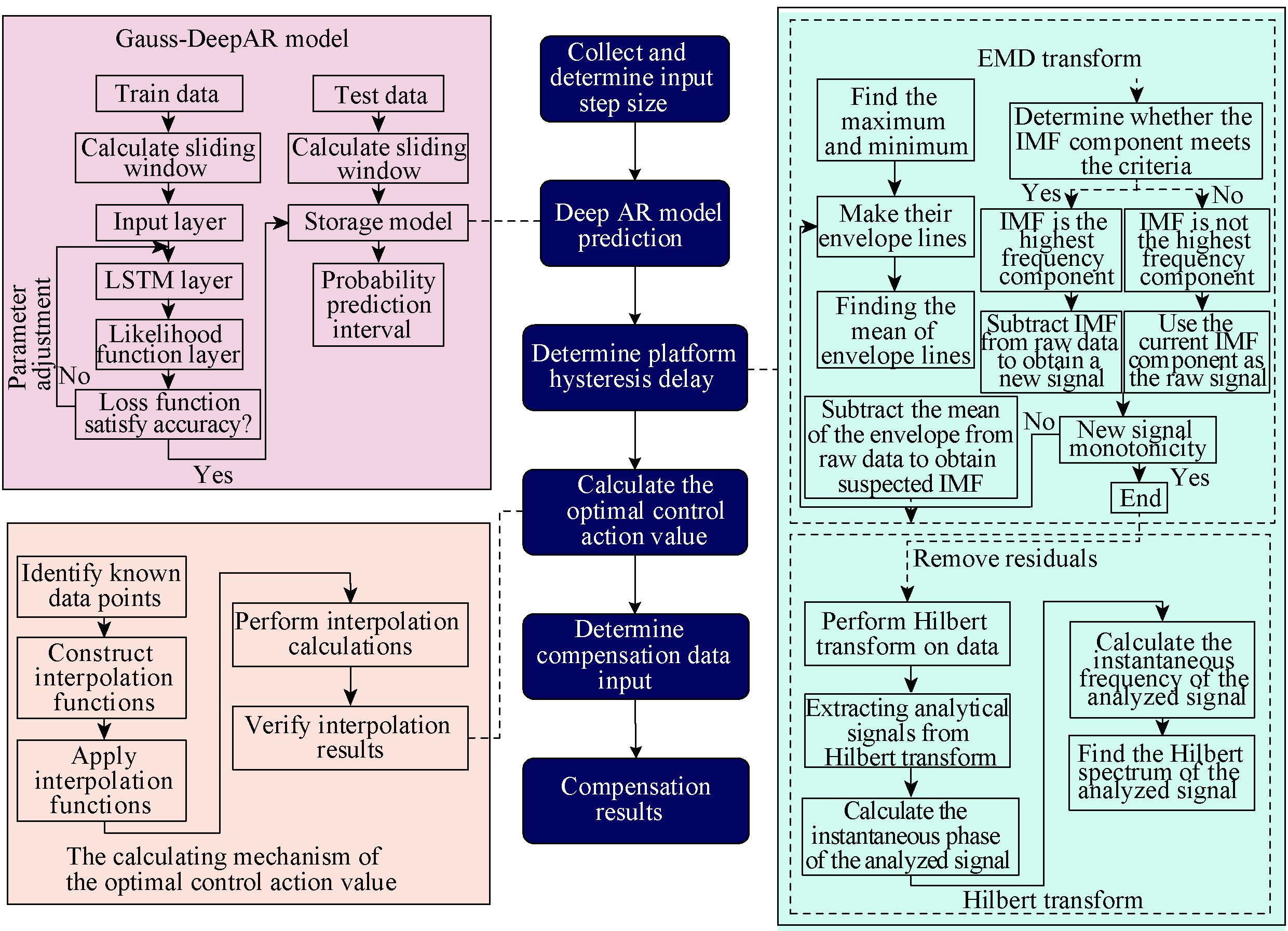
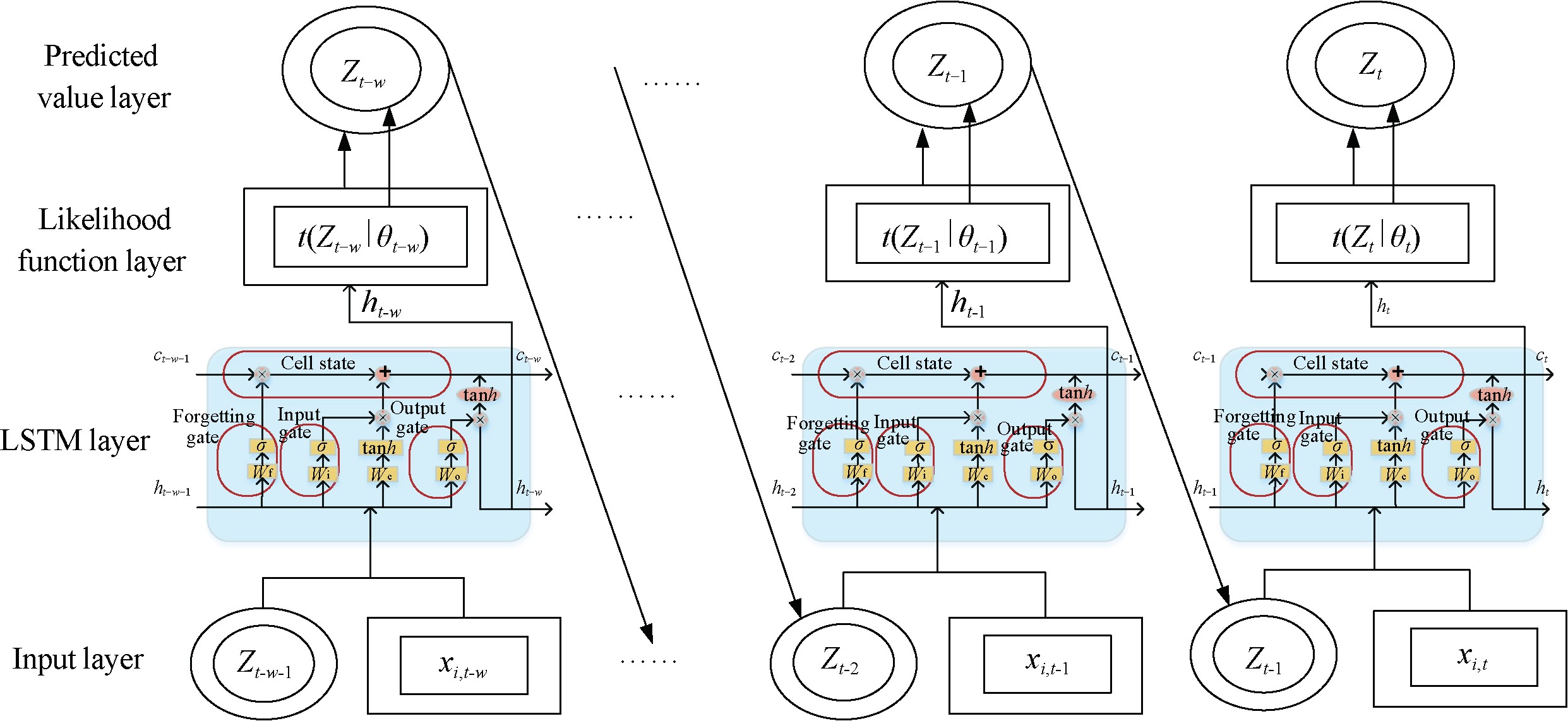
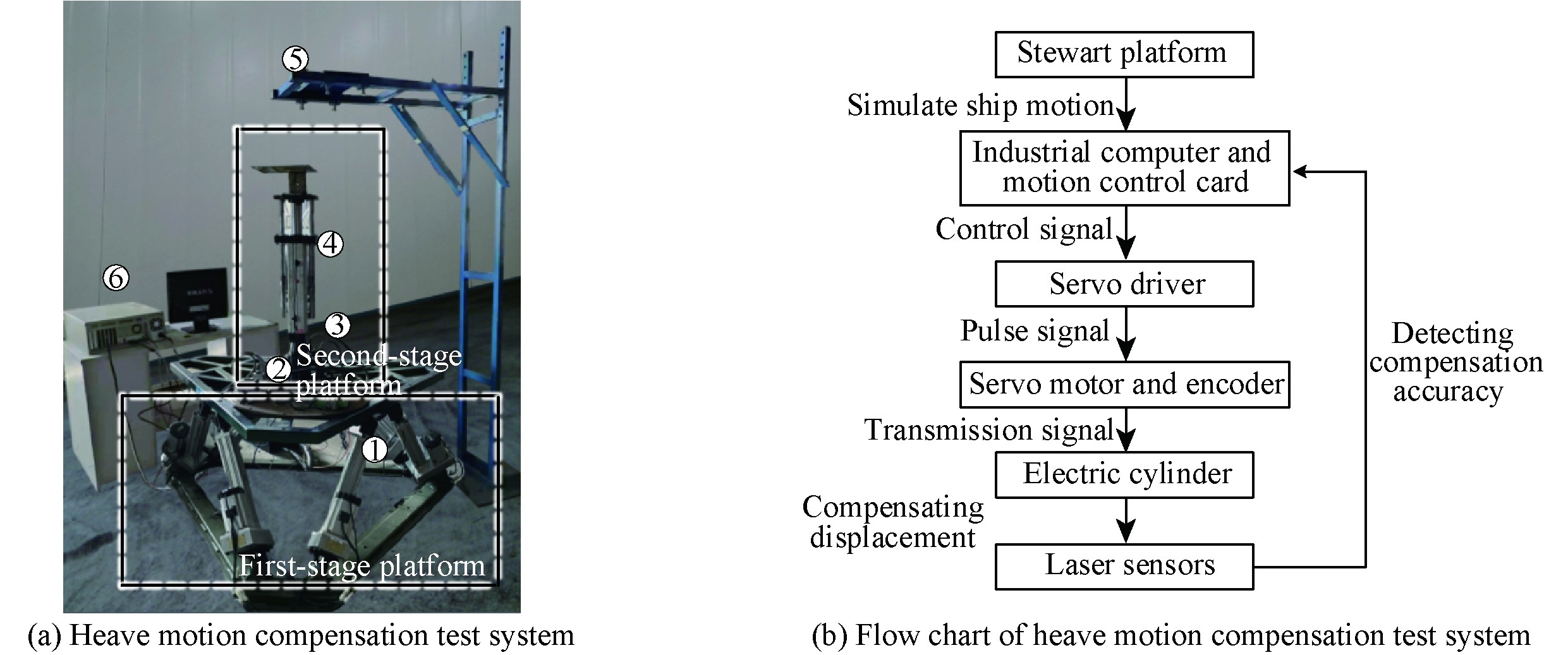
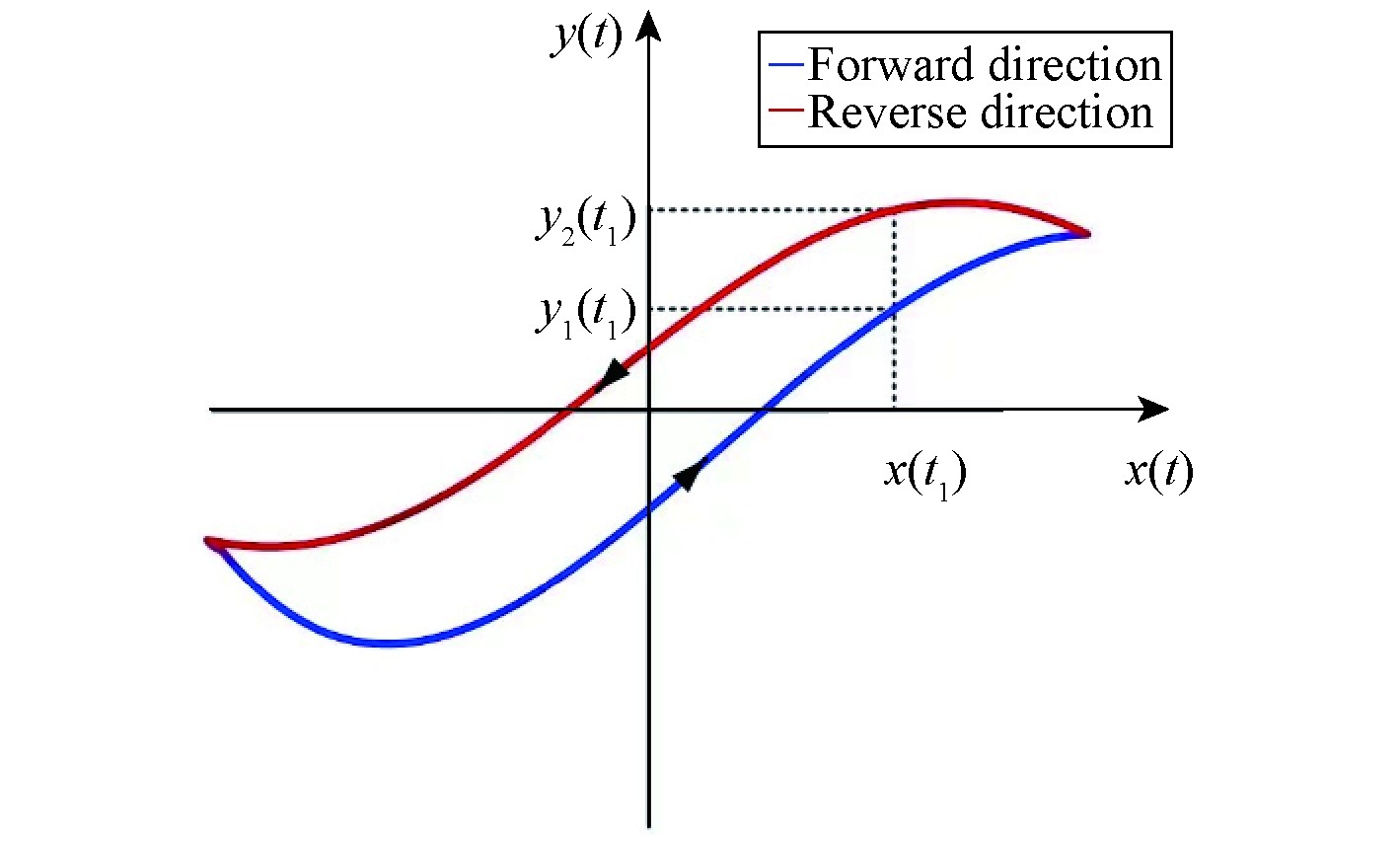
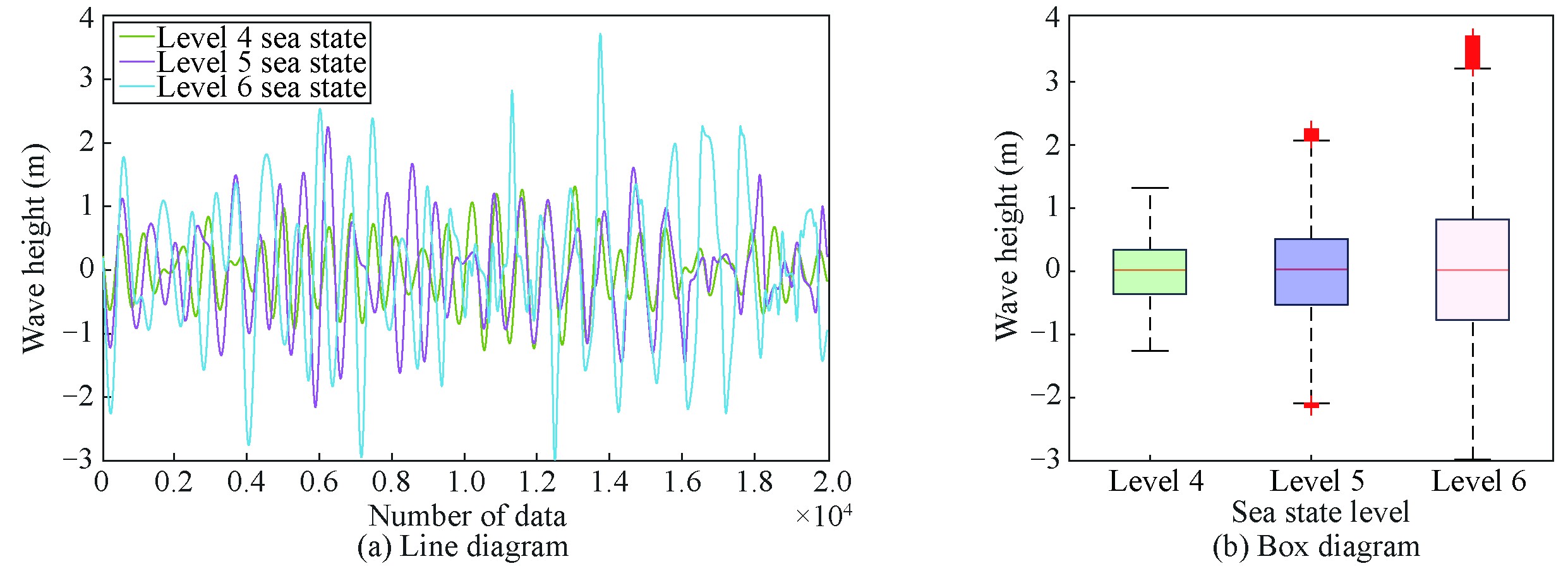
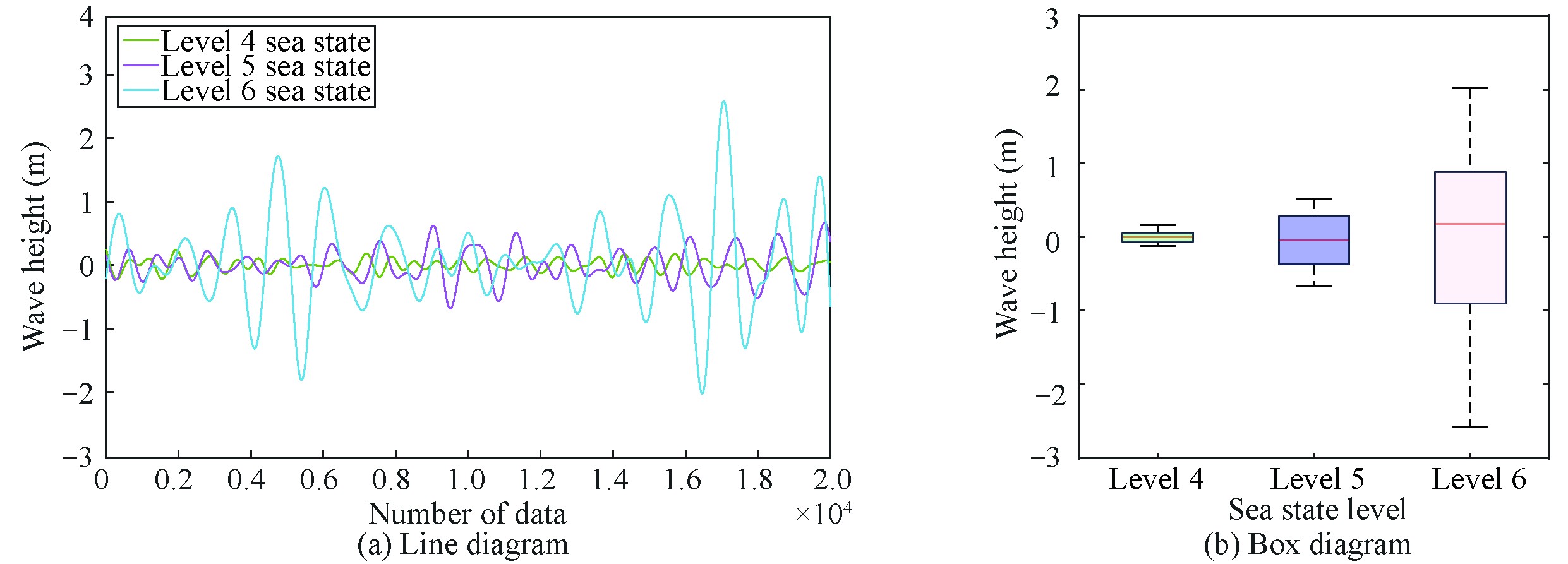
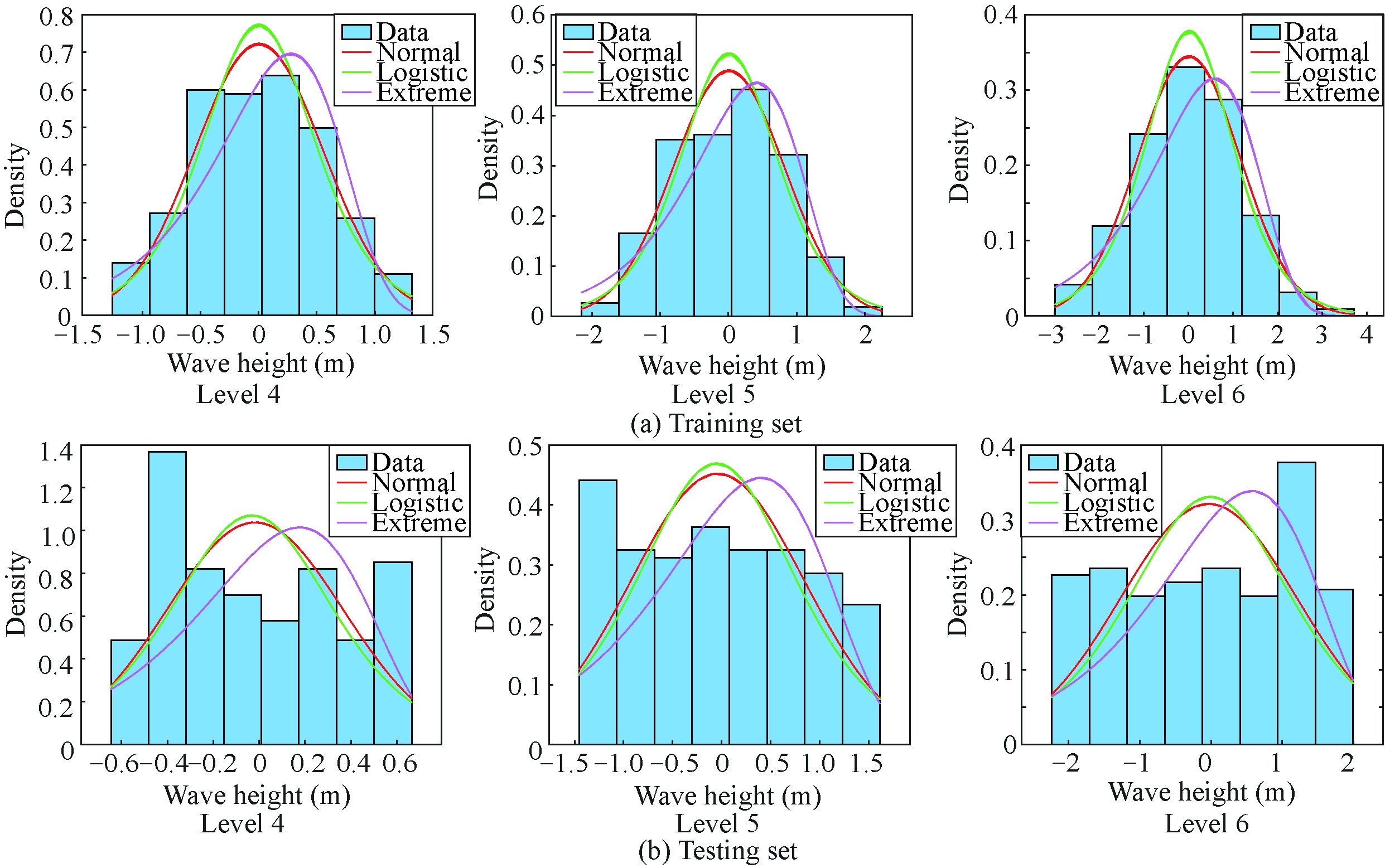
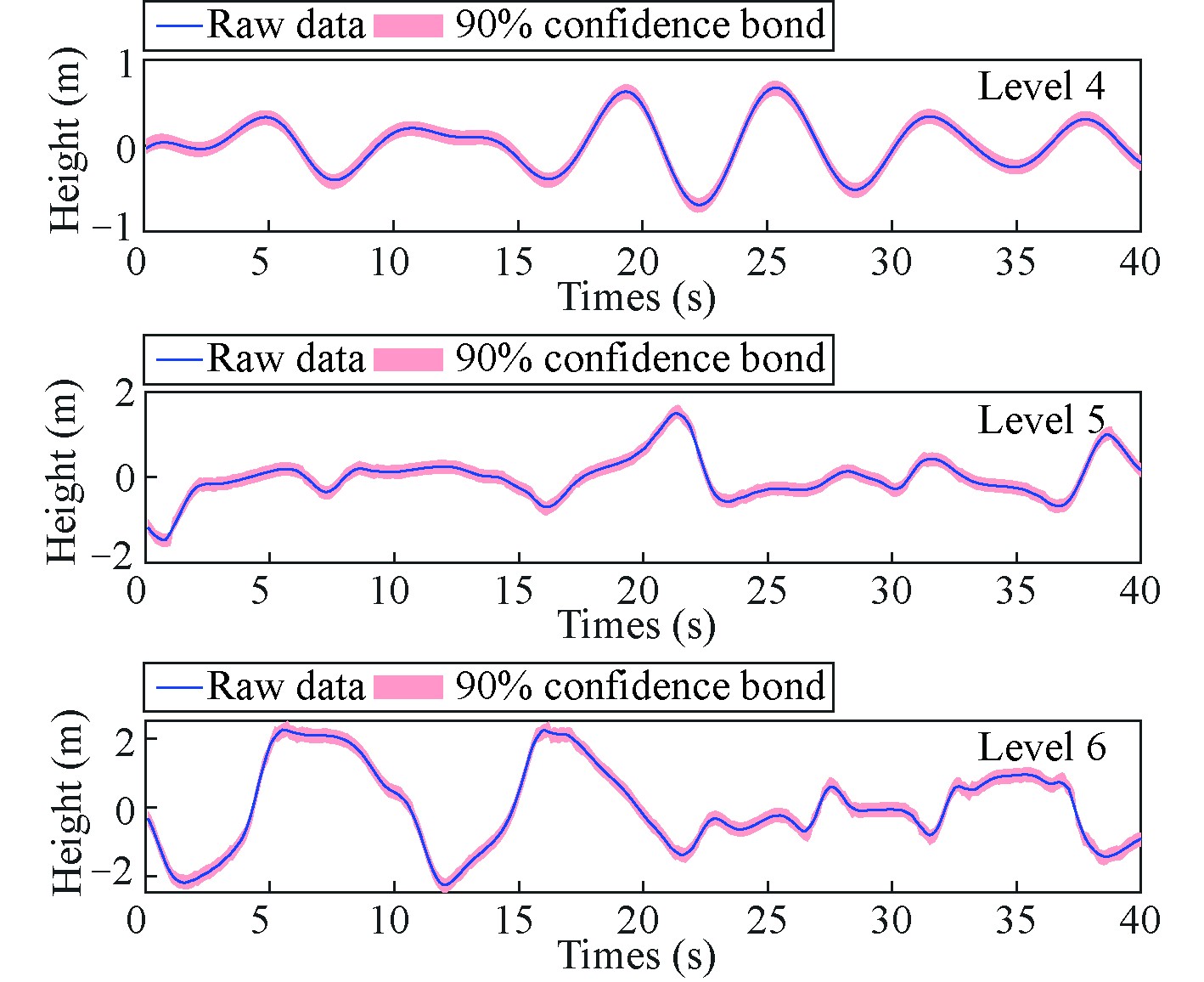
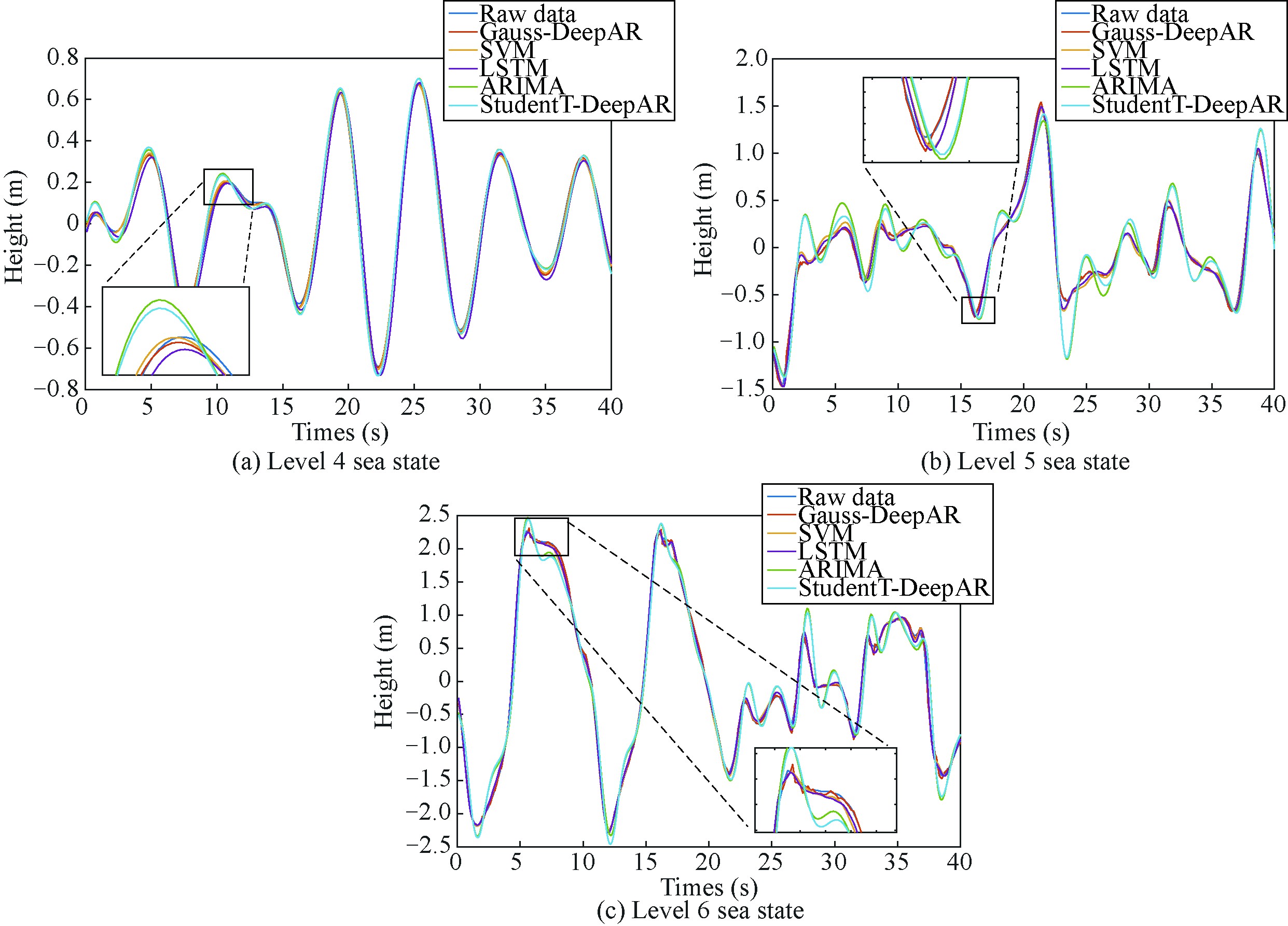
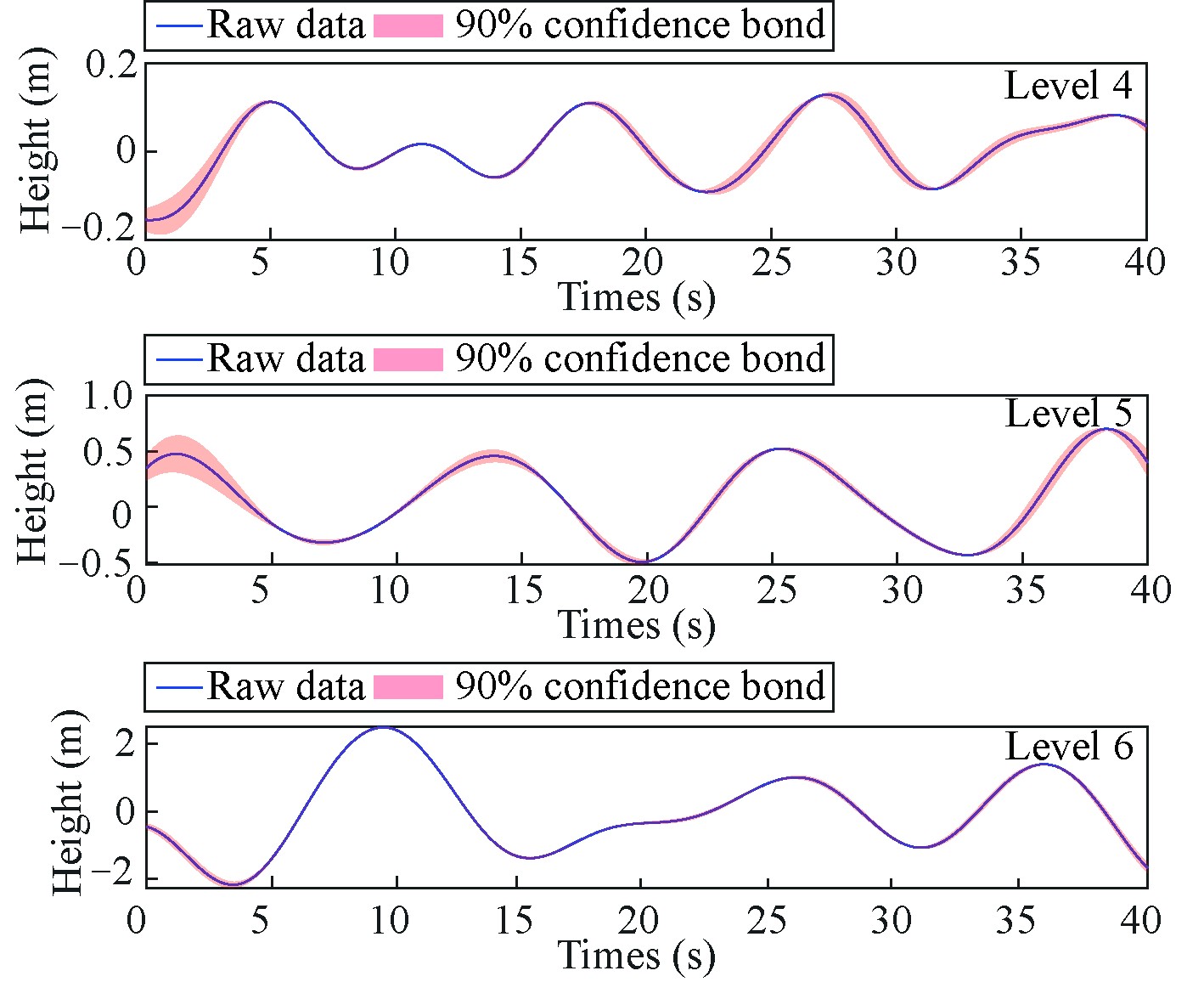
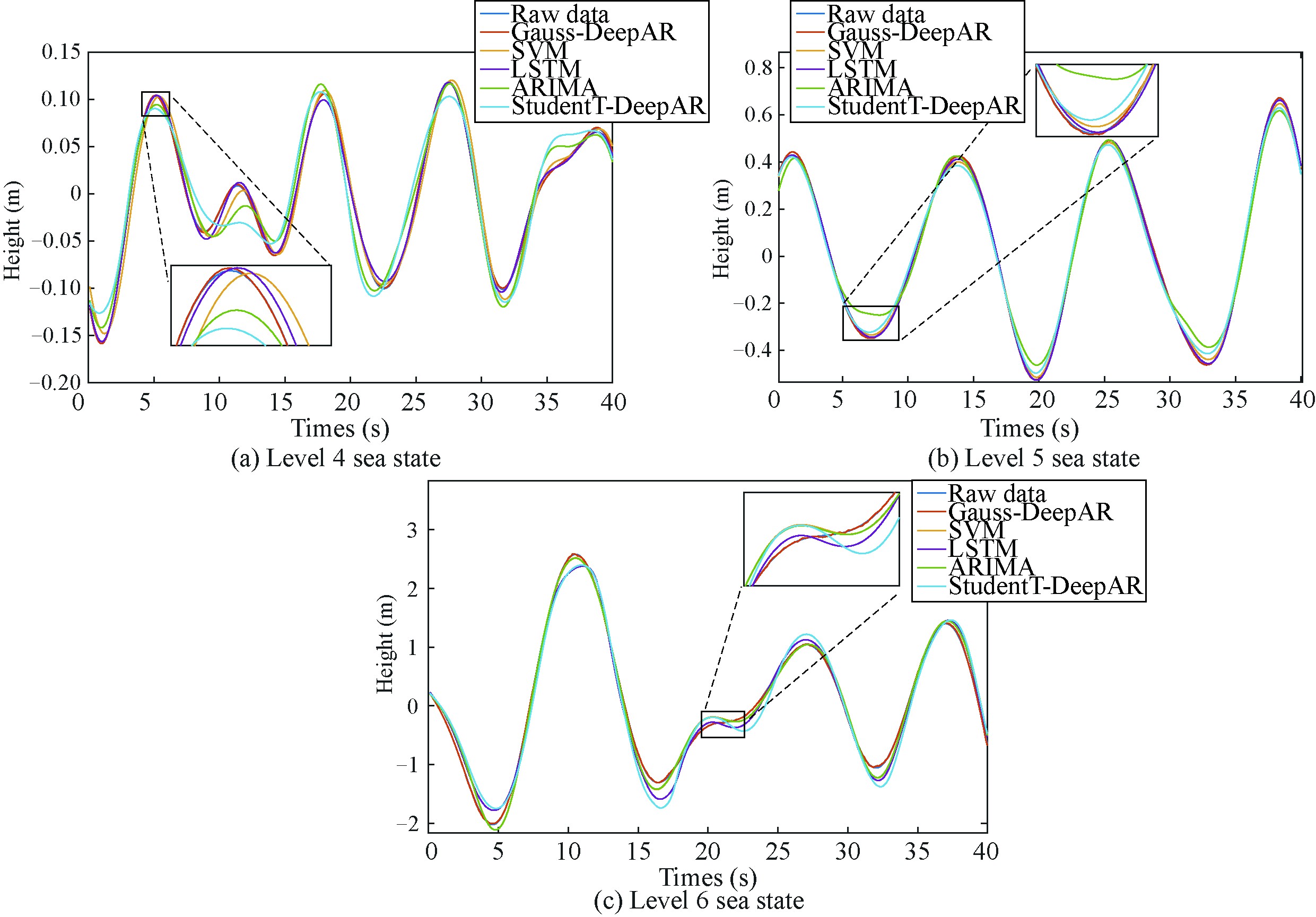
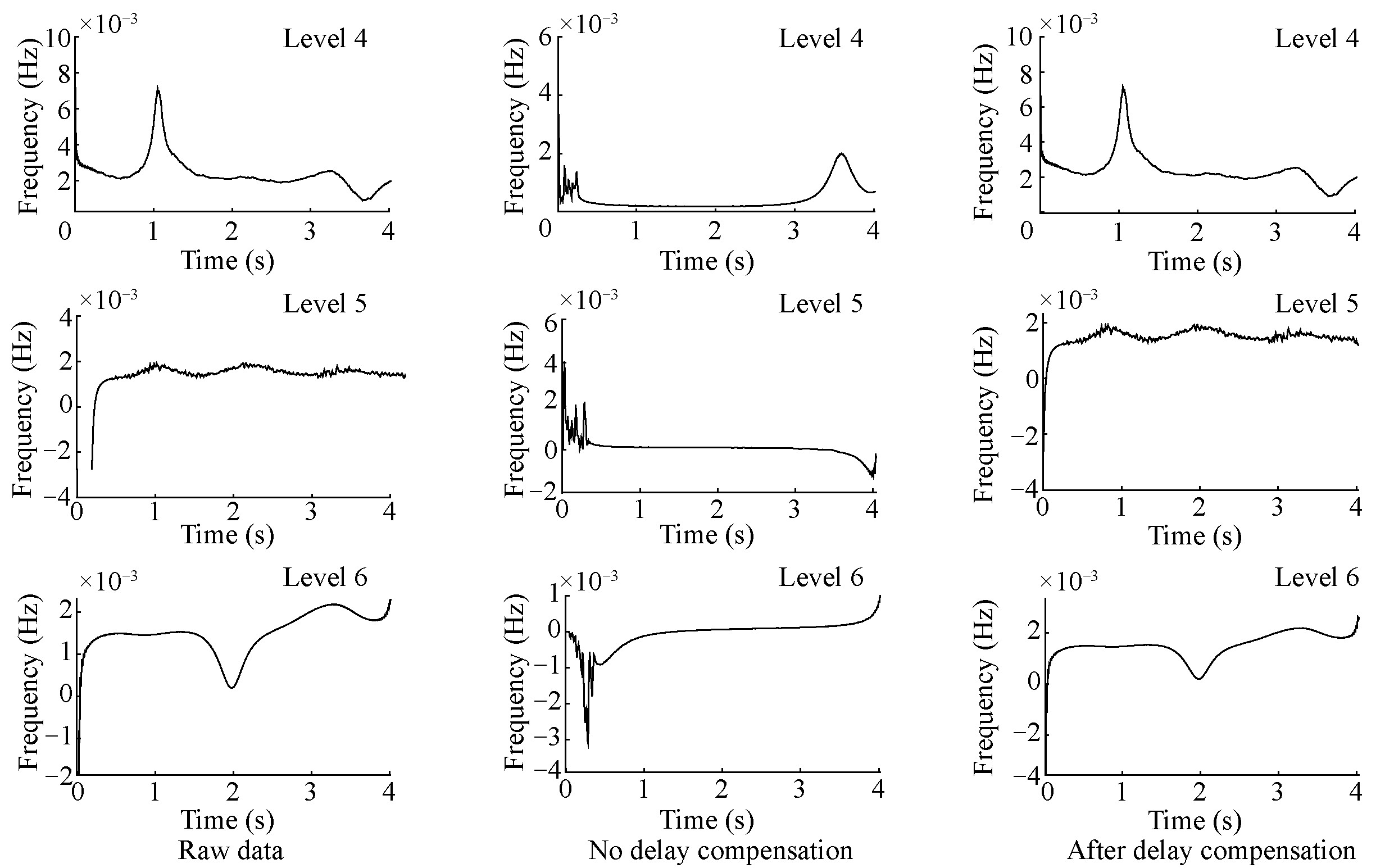
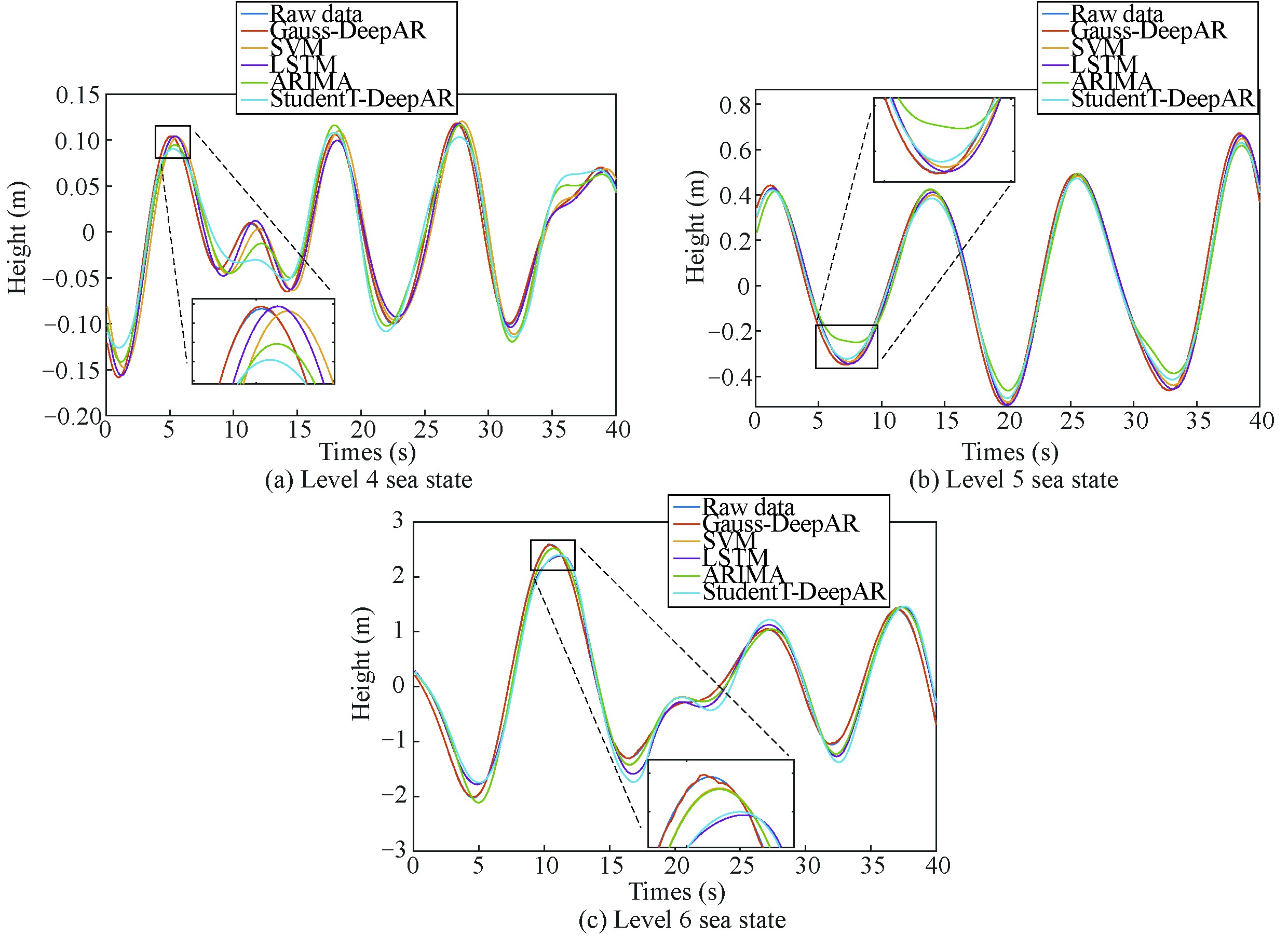
The prediction and compensation control of marine ship motion is crucial for ensuring the safety of offshore wind turbine loading and unloading operations. However, the accuracy of prediction and control is significantly affected by the hysteresis phenomenon in the wave compensation system. To address this issue, a ship heave motion prediction is proposed in this paper on the basis of the Gauss-DeepAR (AR stands for autoregressive recurrent) model and the Hilbert?Huang time-delay compensation control strategy. Initially, the zero upward traveling wave period of the level 4?6 sea state ship heave motion is analyzed, which serves as the input sliding window for the Gauss-DeepAR prediction model, and probability predictions at different wave direction angles are conducted. Next, considering the hysteresis characteristics of the ship heave motion compensation platform, the Hilbert?Huang transform is employed to analyze and calculate the hysteresis delay of the compensation platform. After the optimal control action value is subsequently calculated, simulations and hardware platform tests are conducted. The simulation results demonstrated that the Gauss-DeepAR model outperforms autoregressive integrated moving average model (ARIMA) , support vector machine (SVM), and longshort-term memory (LSTM) in predicting non-independent identically distributed datasets at a 90° wave direction angle in the level 4?6 sea states. Furthermore, the model has good predictive performance and generalizability for non-independent and non-uniformly distributed datasets at a 180° wave direction angle. The hardware platform compensation test results revealed that the Hilbert–Huang method has an outstanding effect on determining the hysteretic delay and selecting the optimal control action value, and the compensation efficiency was higher than 90% in the level 4?6 sea states.
The prediction and compensation control of marine ship motion is crucial for ensuring the safety of offshore wind turbine loading and unloading operations. However, the accuracy of prediction and control is significantly affected by the hysteresis phenomenon in the wave compensation system. To address this issue, a ship heave motion prediction is proposed in this paper on the basis of the Gauss-DeepAR (AR stands for autoregressive recurrent) model and the Hilbert?Huang time-delay compensation control strategy. Initially, the zero upward traveling wave period of the level 4?6 sea state ship heave motion is analyzed, which serves as the input sliding window for the Gauss-DeepAR prediction model, and probability predictions at different wave direction angles are conducted. Next, considering the hysteresis characteristics of the ship heave motion compensation platform, the Hilbert?Huang transform is employed to analyze and calculate the hysteresis delay of the compensation platform. After the optimal control action value is subsequently calculated, simulations and hardware platform tests are conducted. The simulation results demonstrated that the Gauss-DeepAR model outperforms autoregressive integrated moving average model (ARIMA) , support vector machine (SVM), and longshort-term memory (LSTM) in predicting non-independent identically distributed datasets at a 90° wave direction angle in the level 4?6 sea states. Furthermore, the model has good predictive performance and generalizability for non-independent and non-uniformly distributed datasets at a 180° wave direction angle. The hardware platform compensation test results revealed that the Hilbert–Huang method has an outstanding effect on determining the hysteretic delay and selecting the optimal control action value, and the compensation efficiency was higher than 90% in the level 4?6 sea states.
2025, 39(2)
:225-231.
doi: 10.1007/s13344-025-0017-6
Abstract:
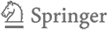
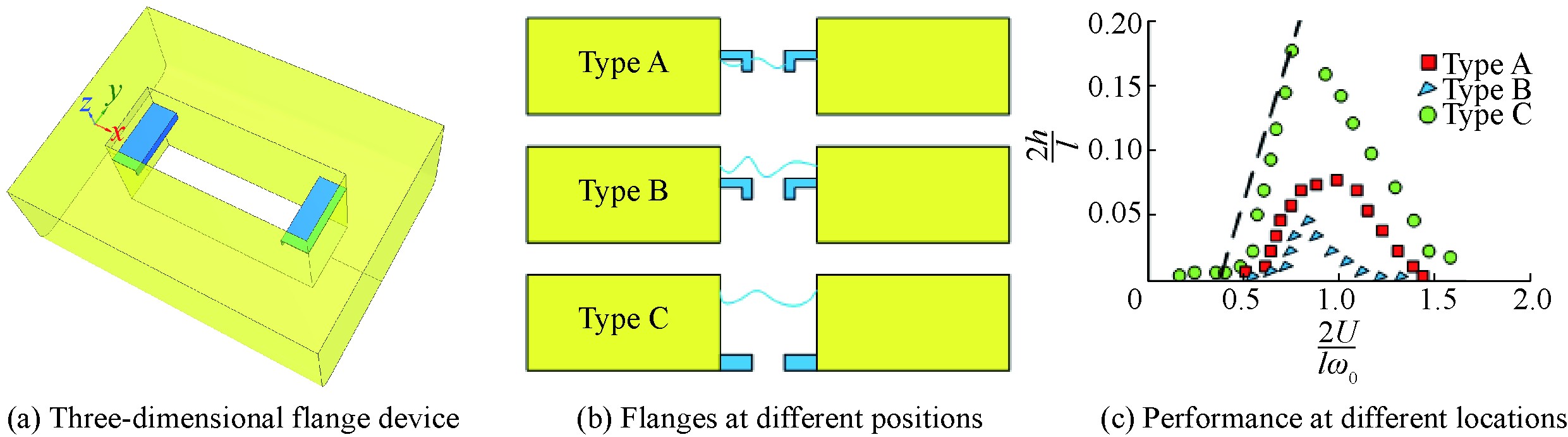
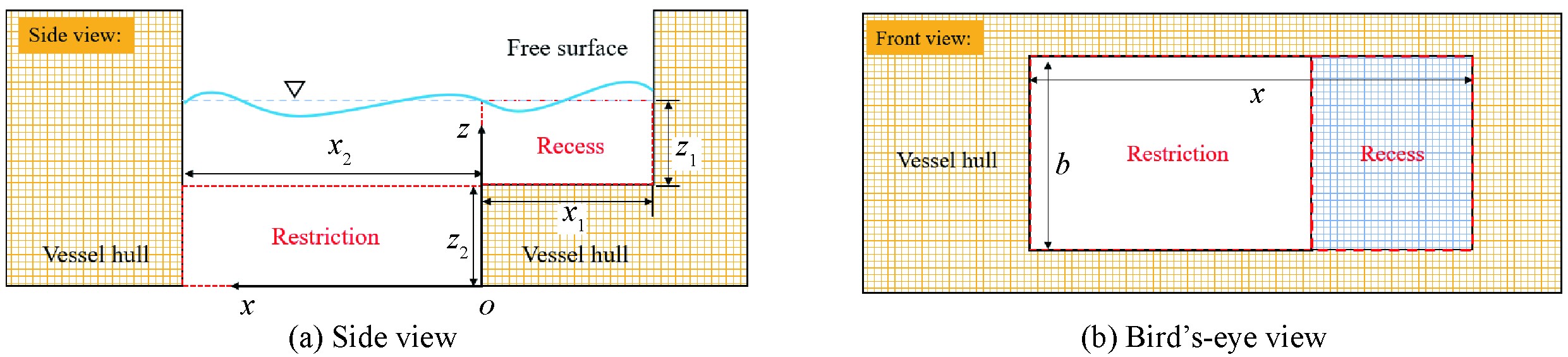
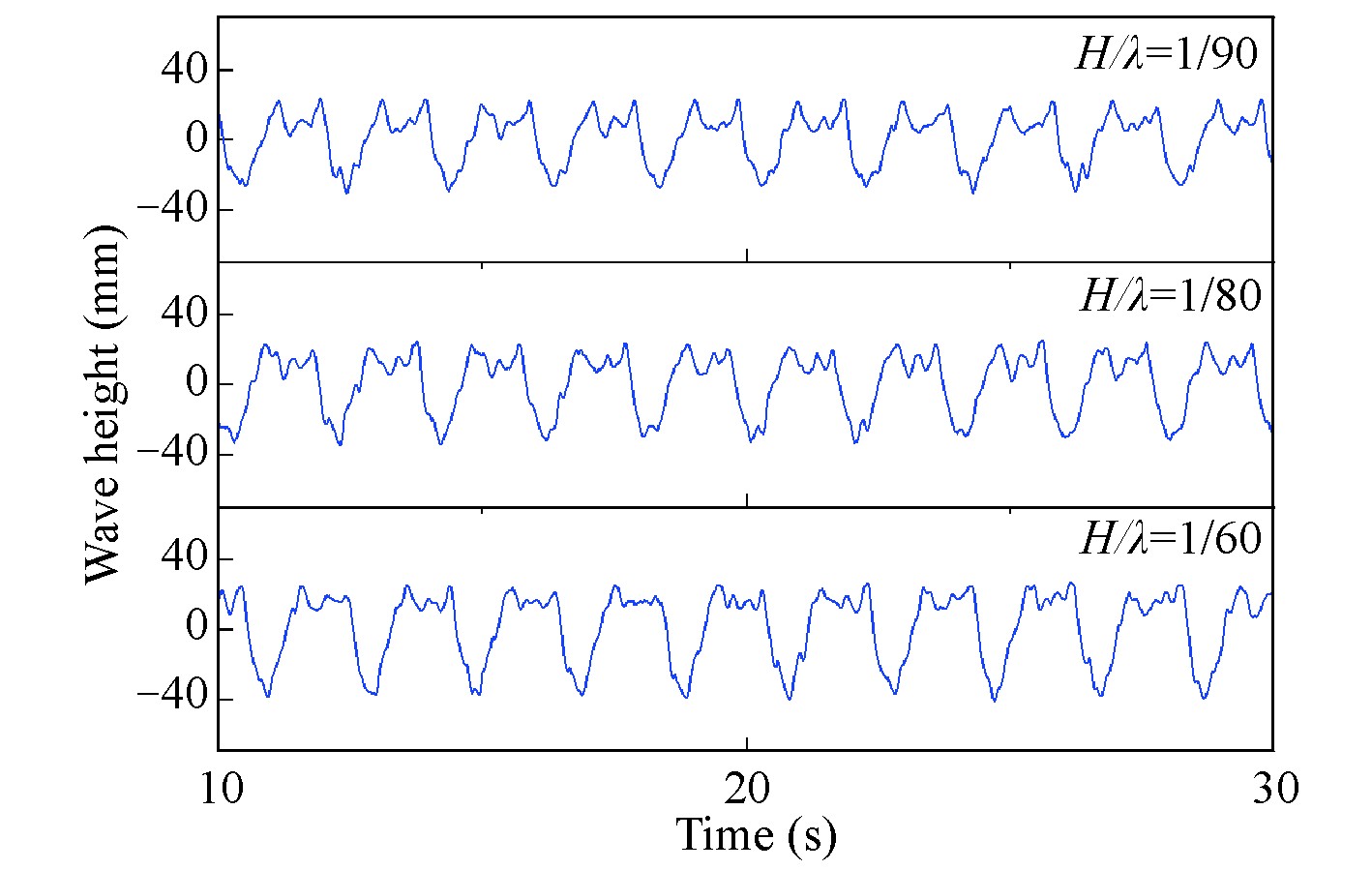
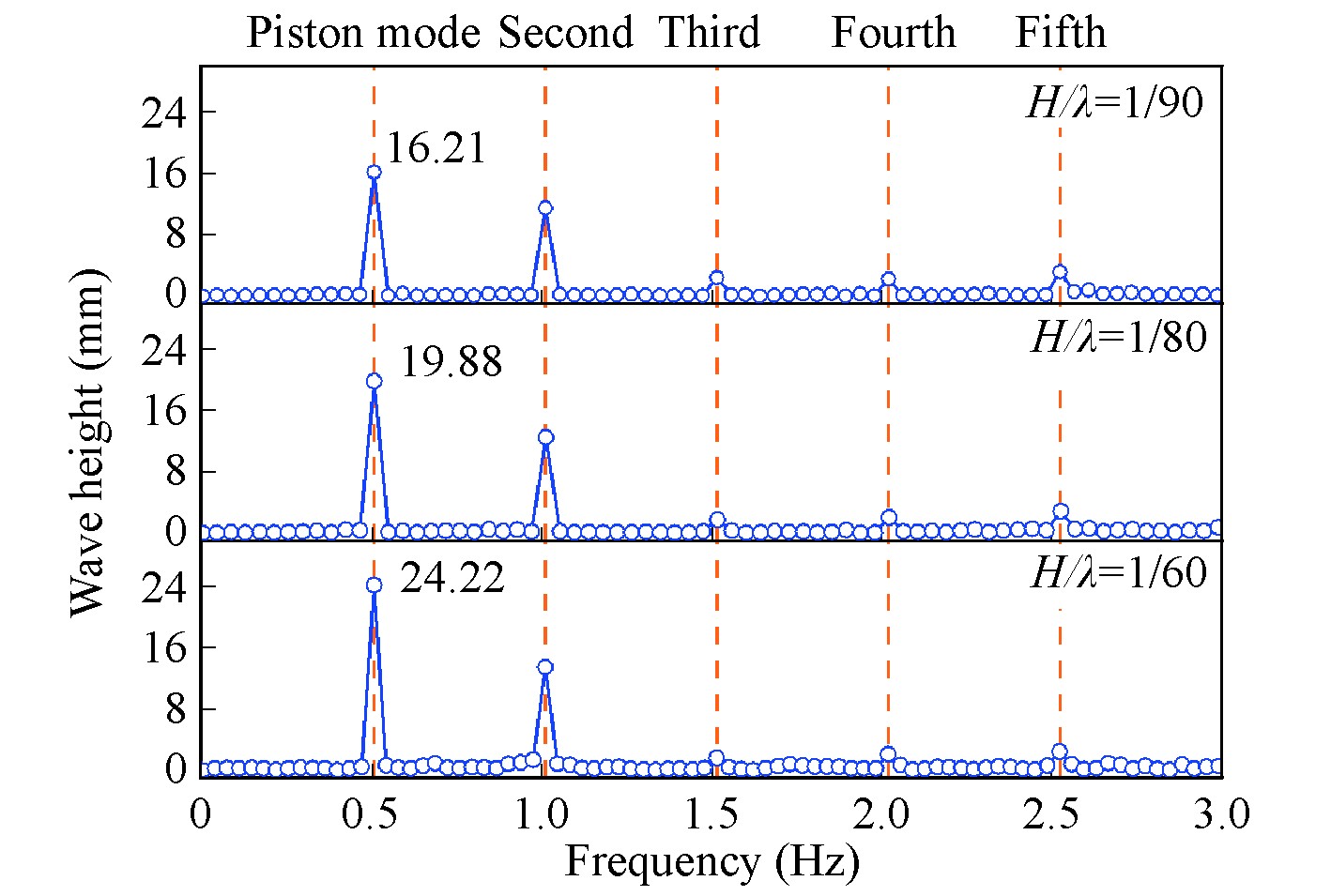
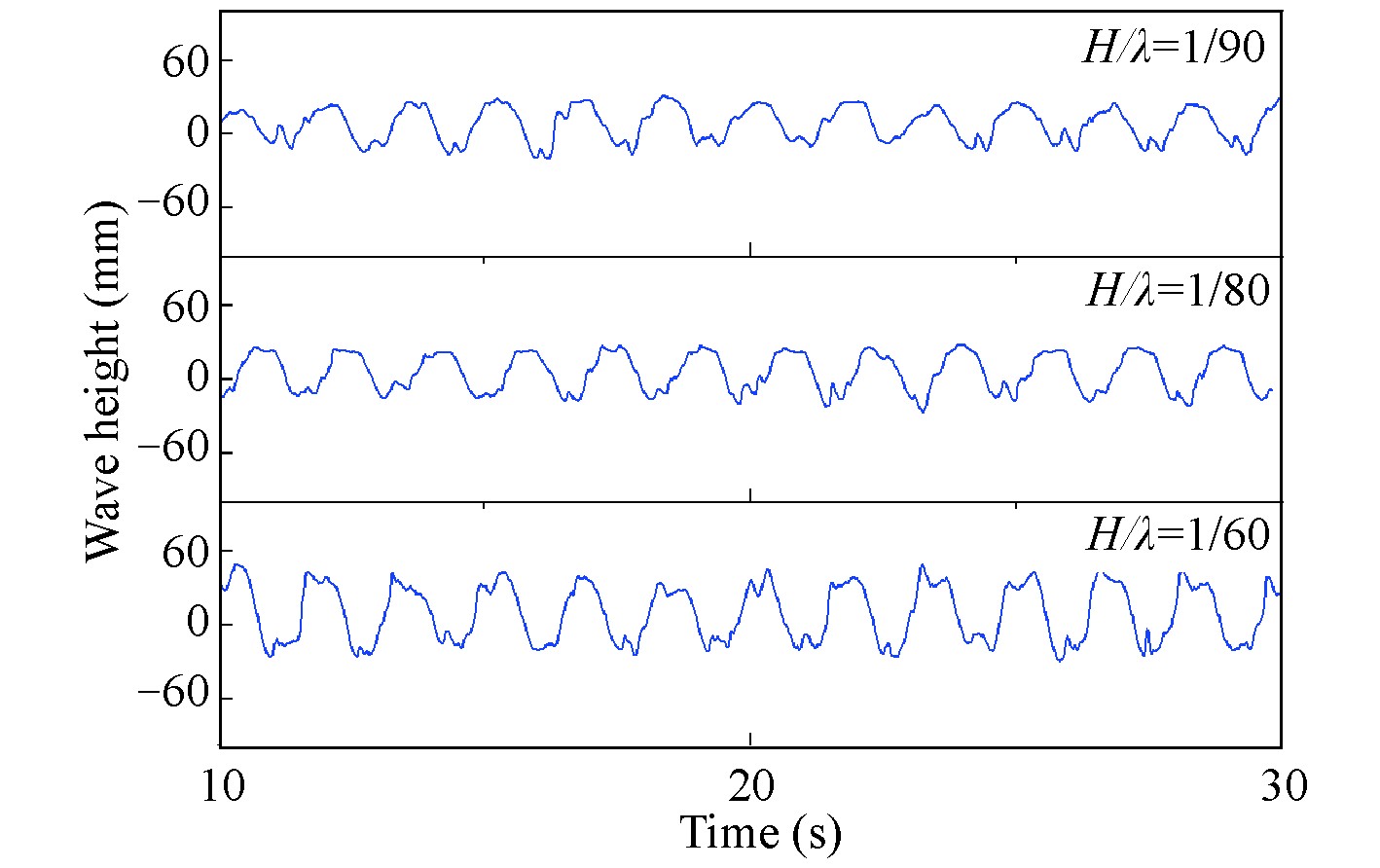
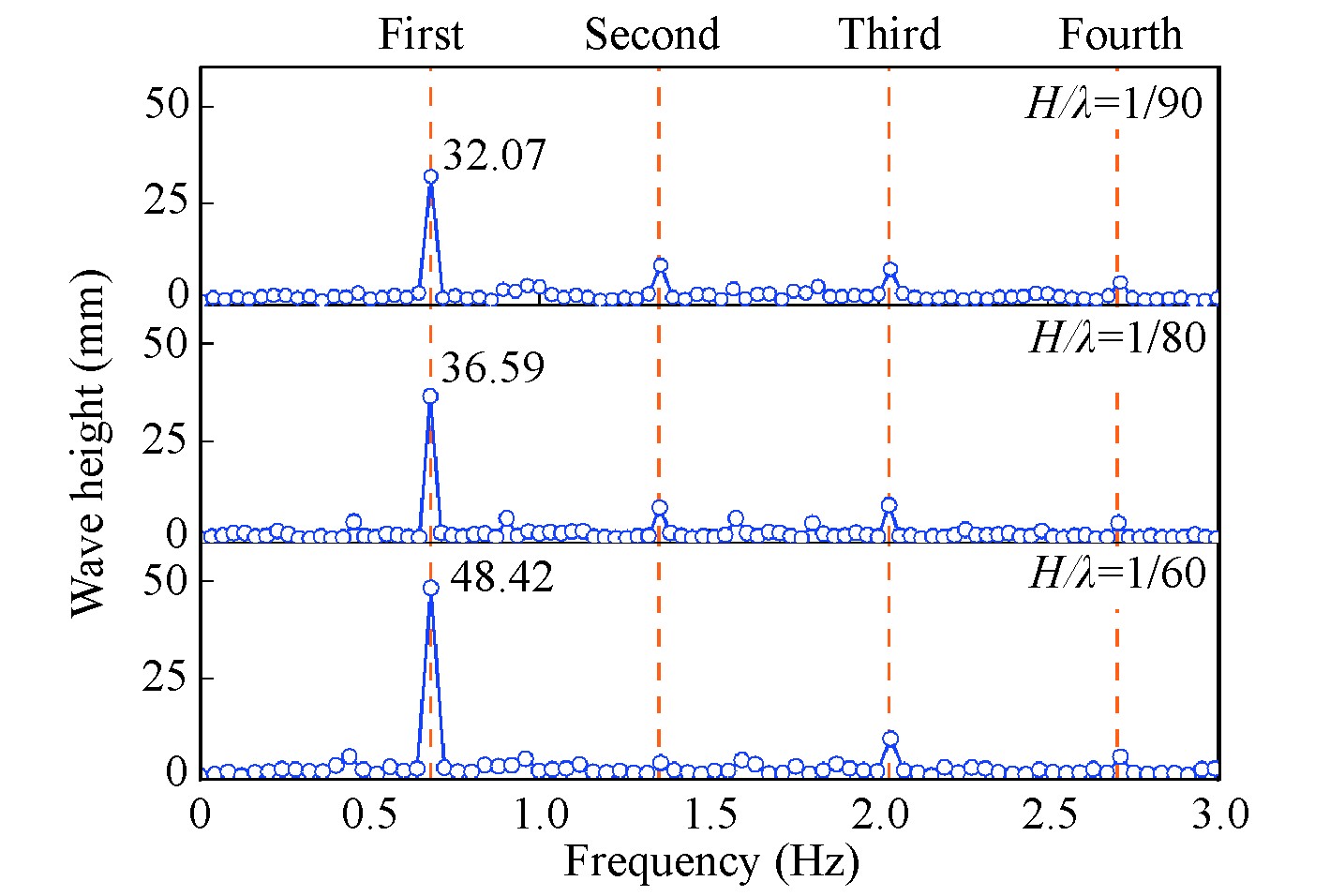
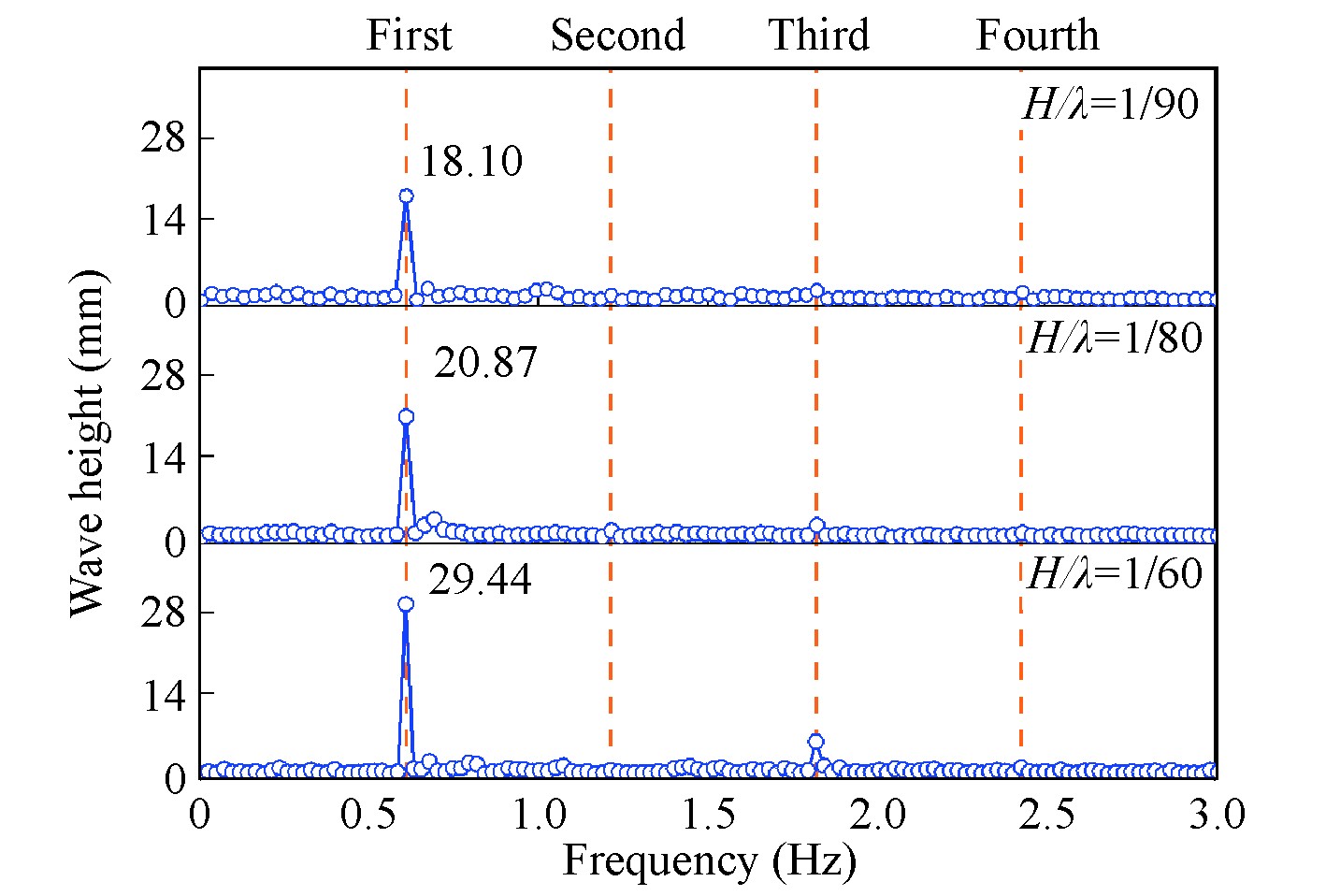
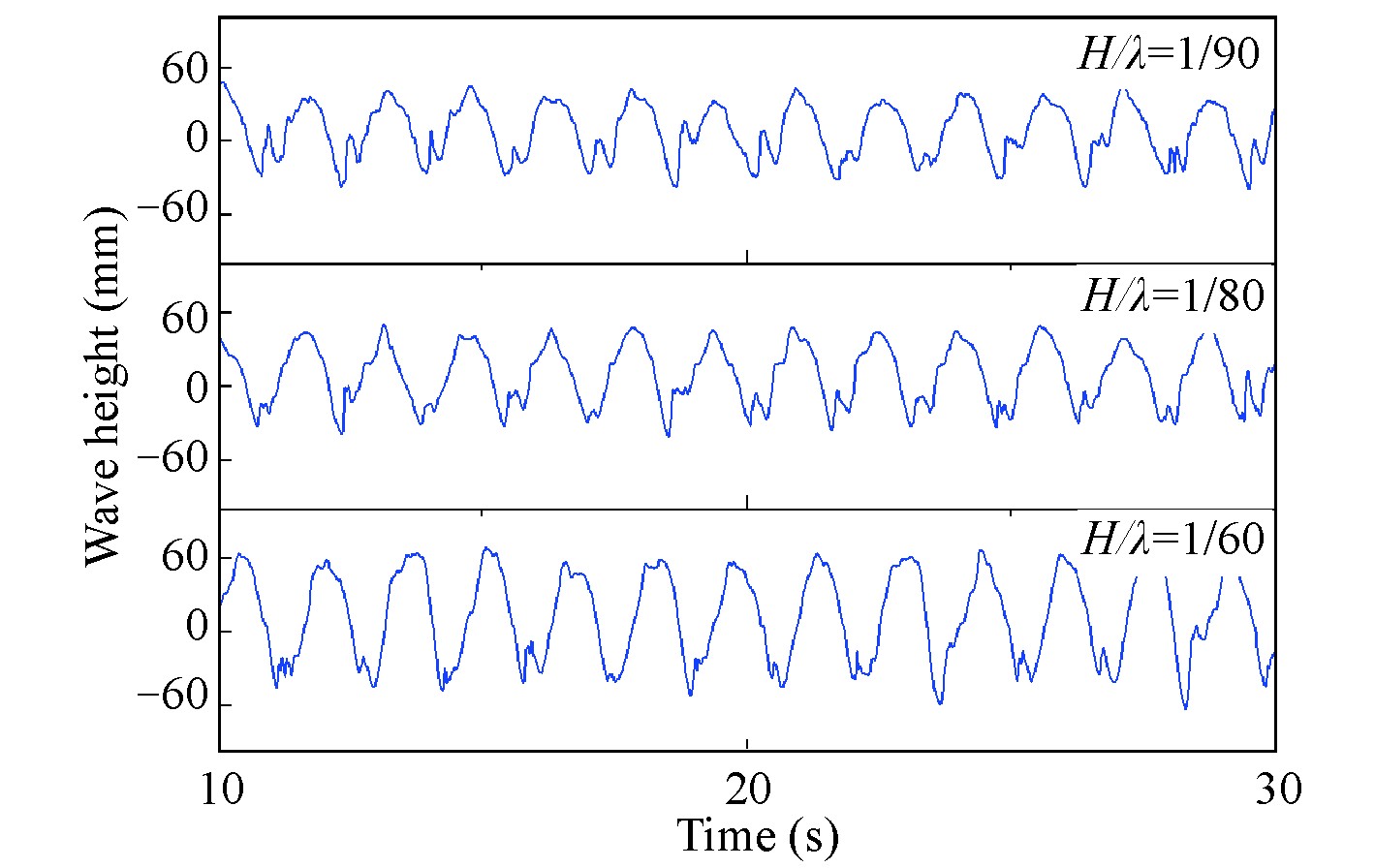
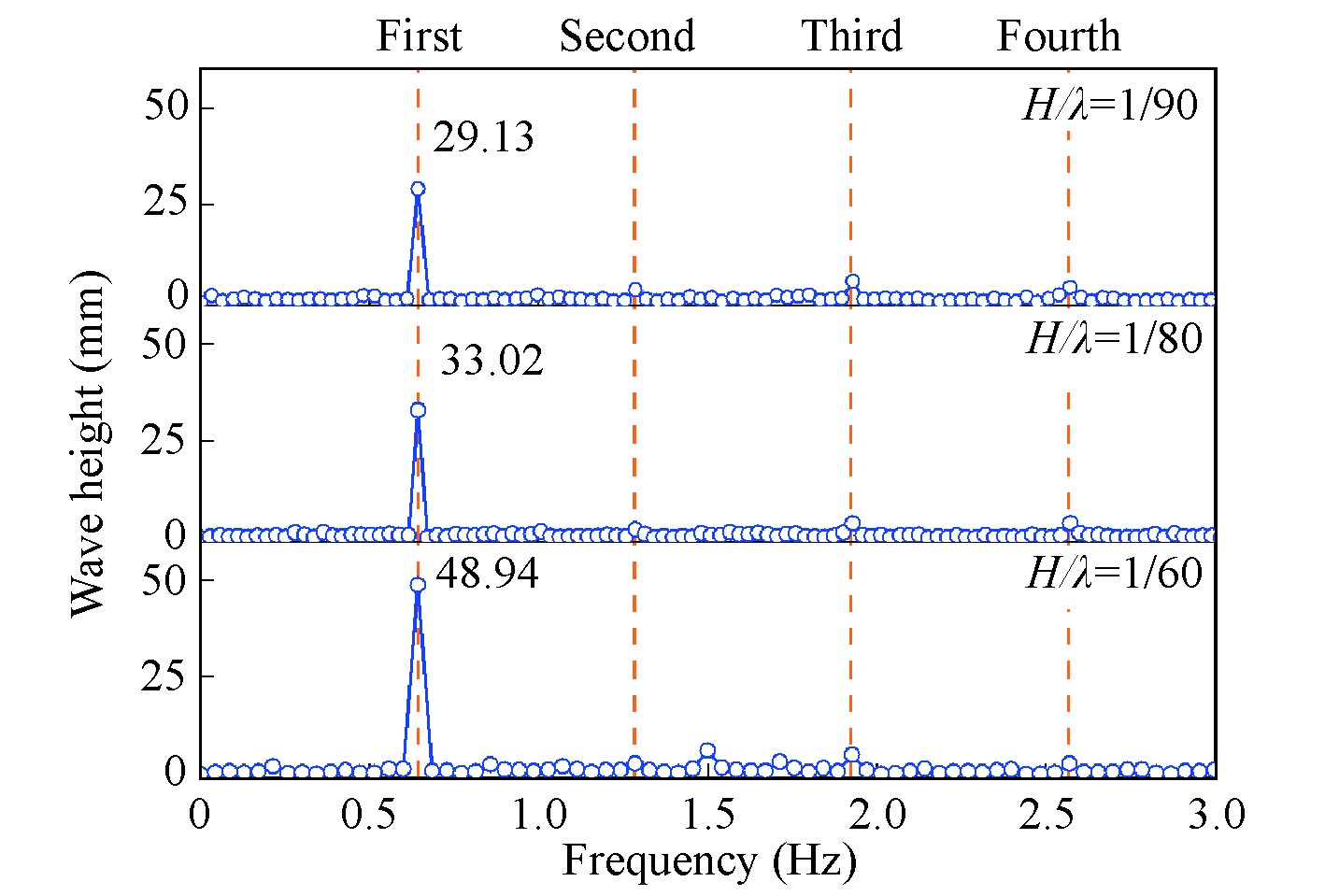
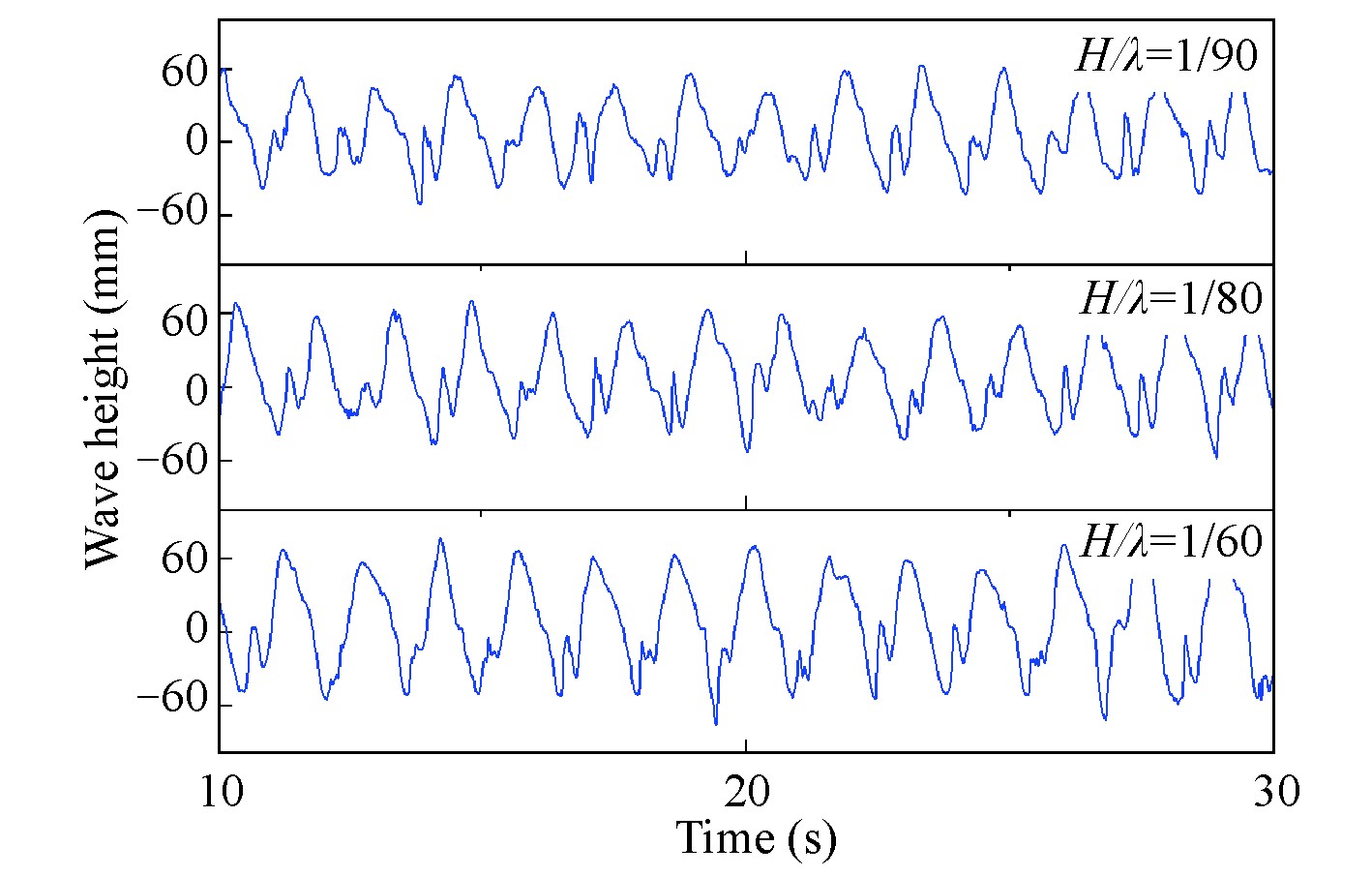
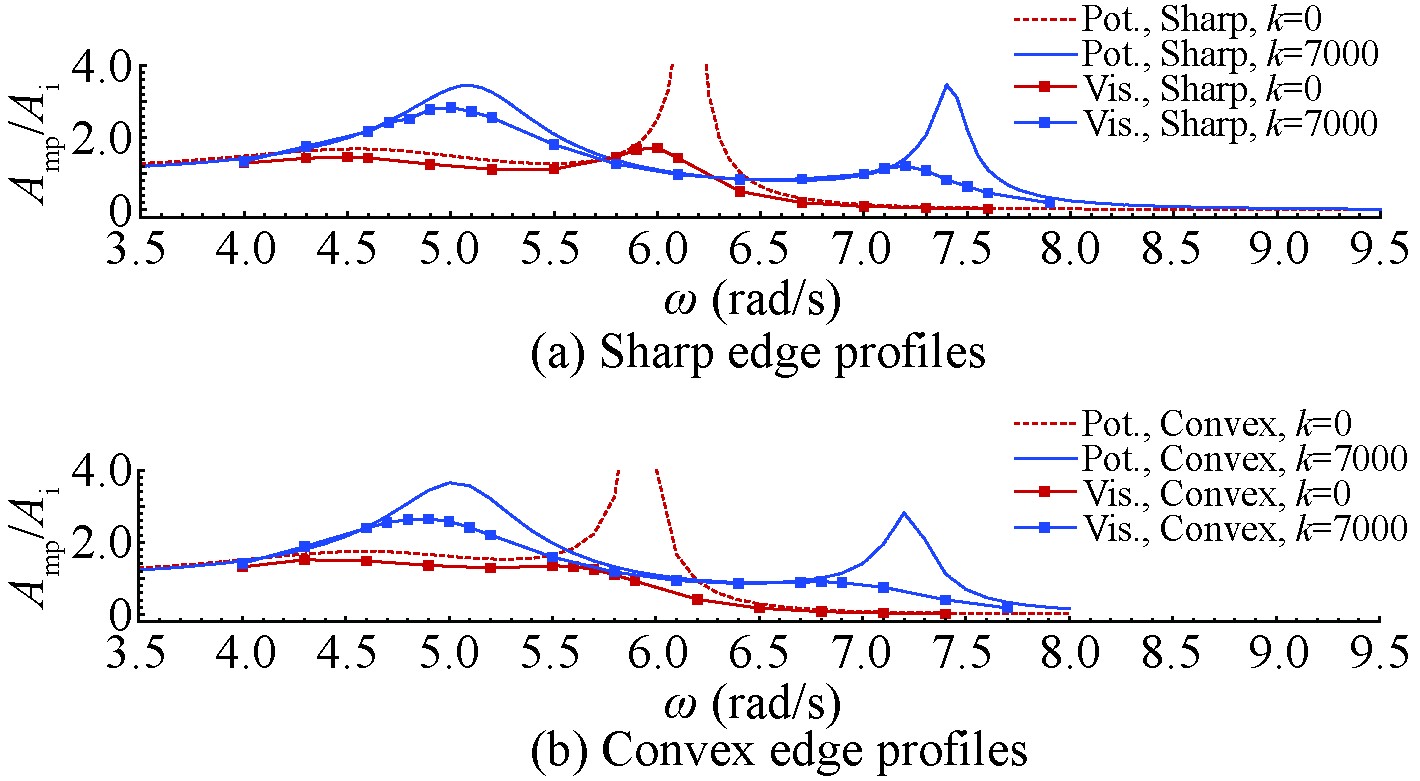
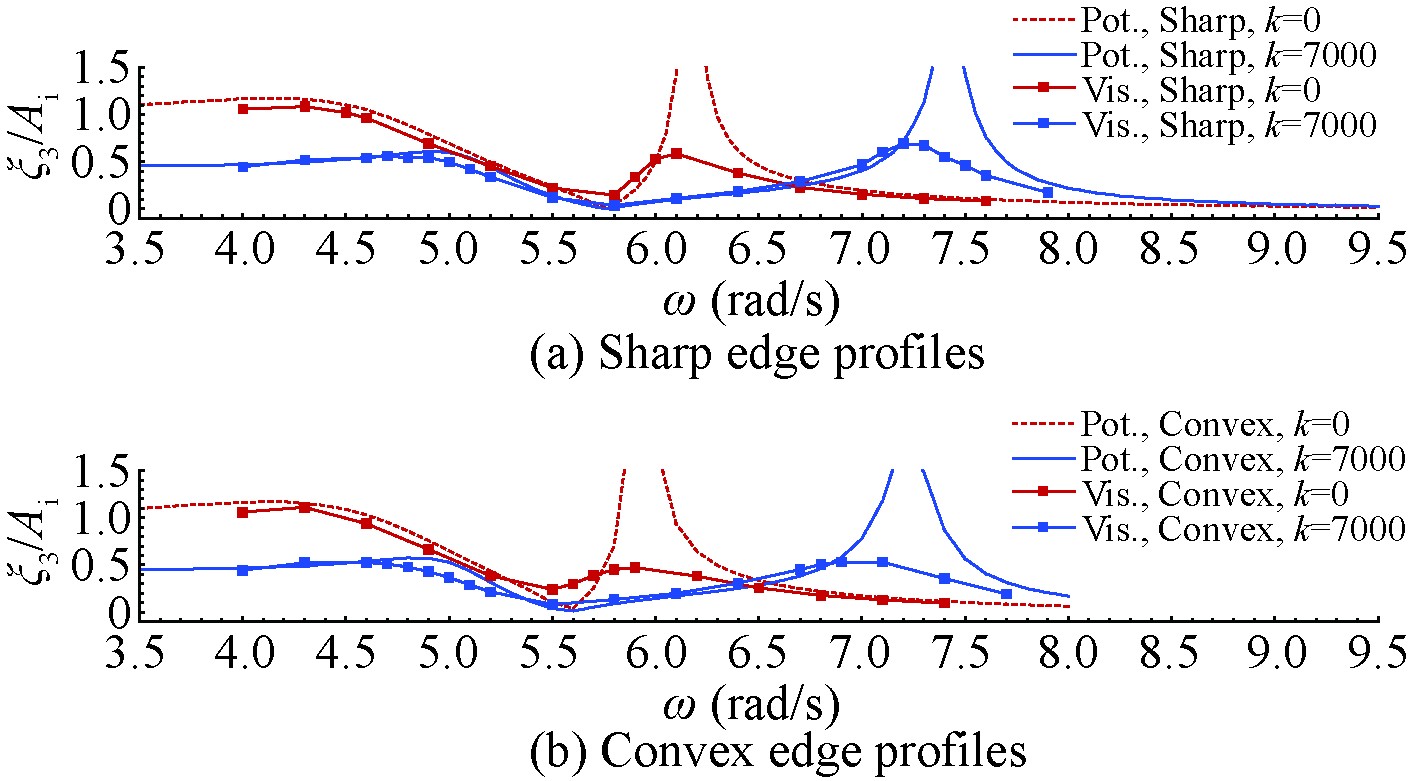
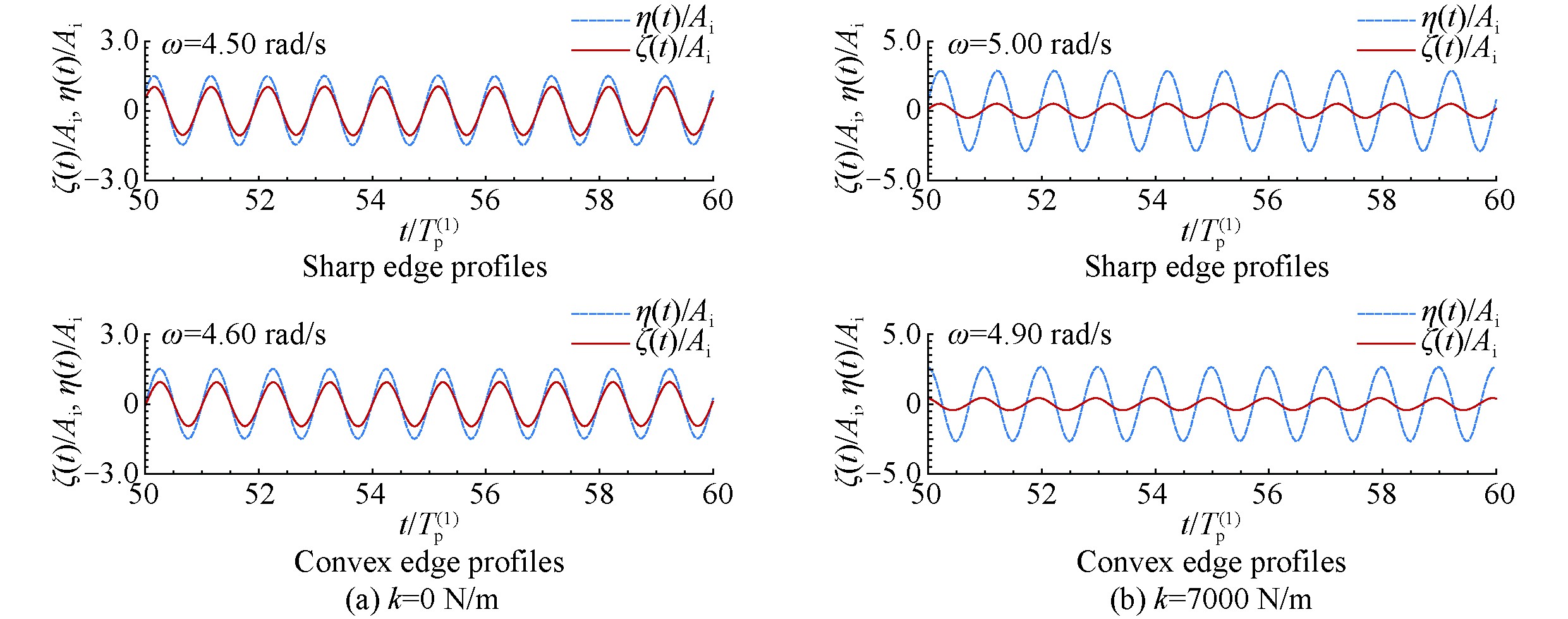
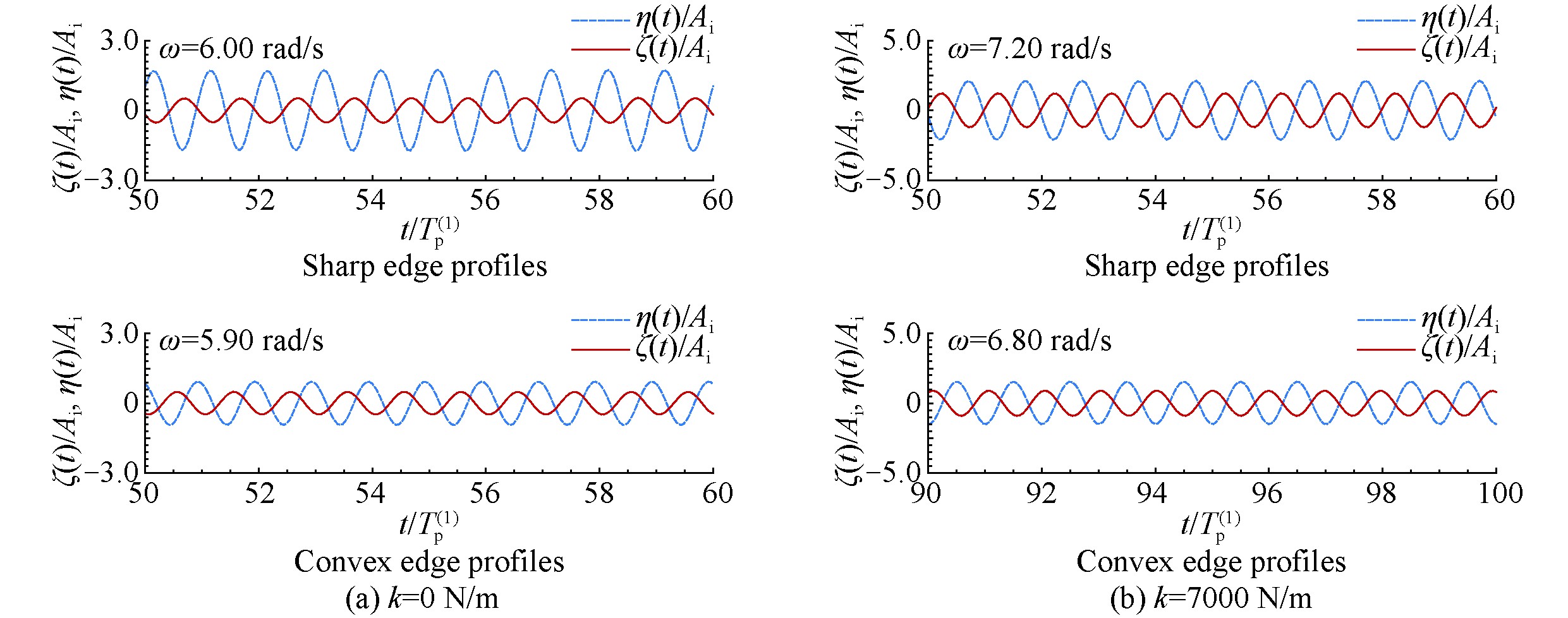
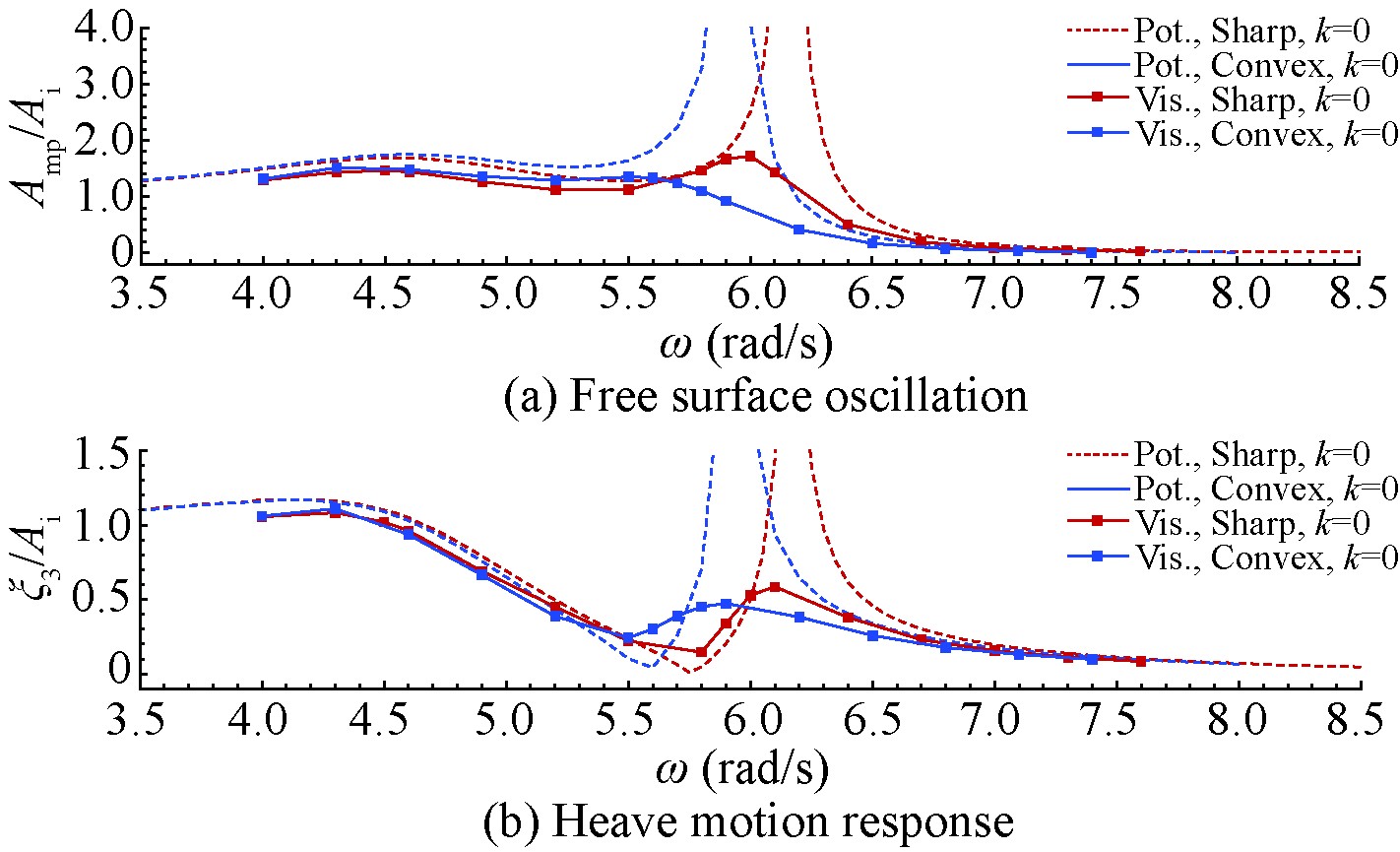
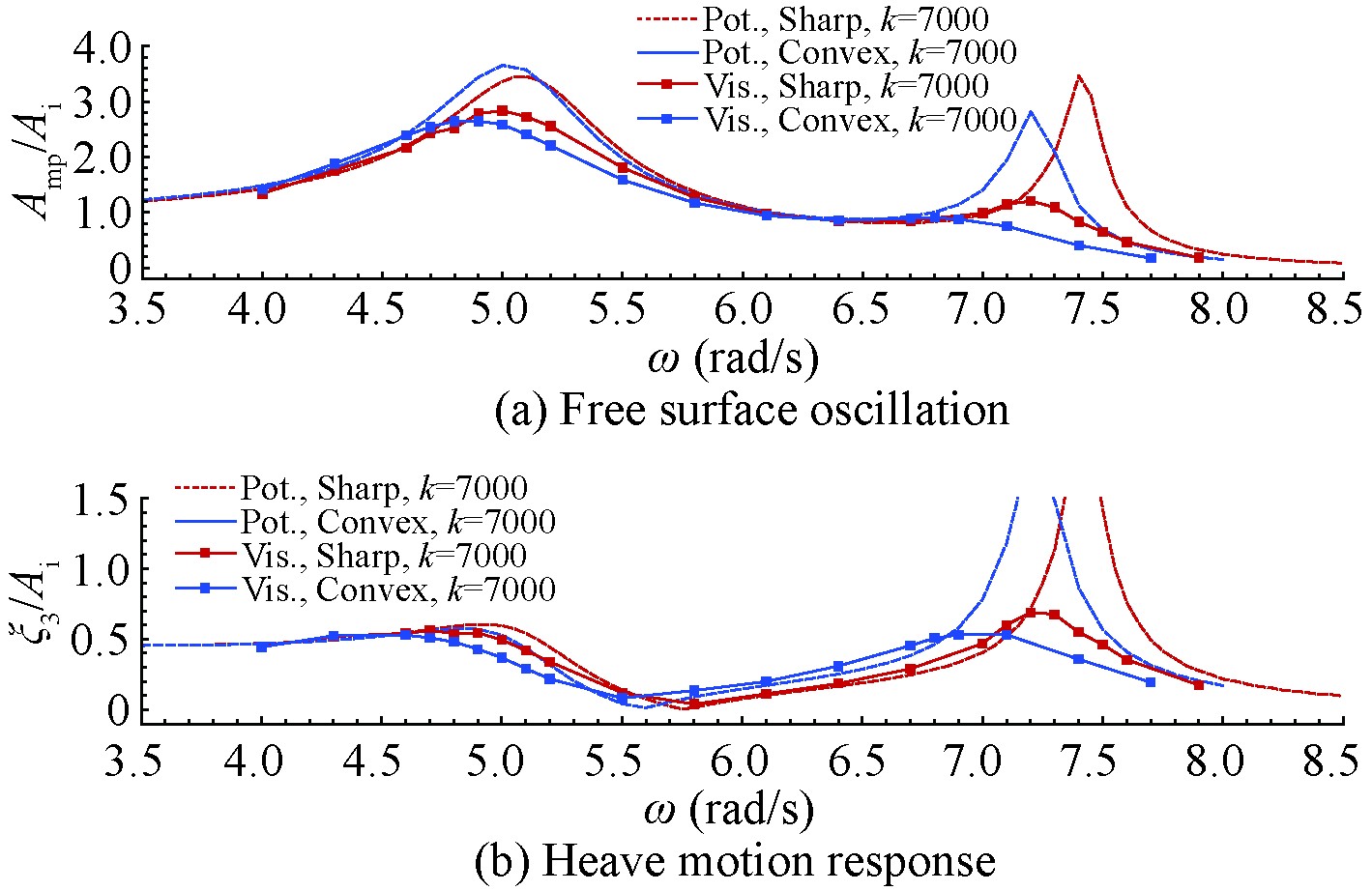
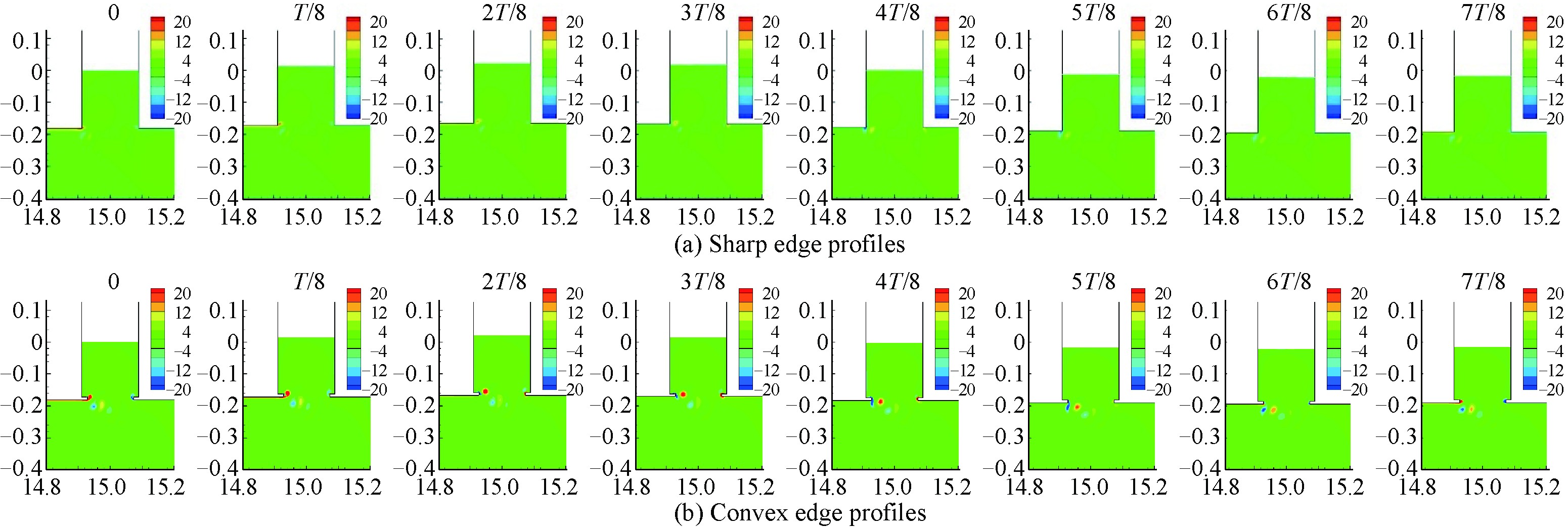
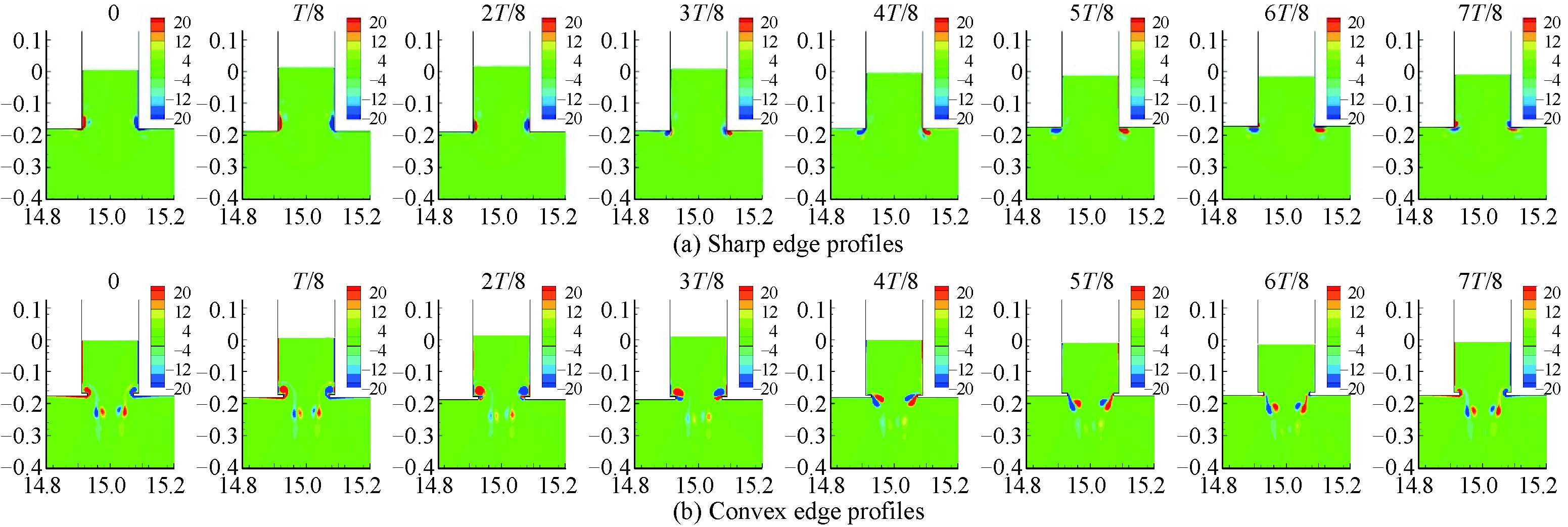
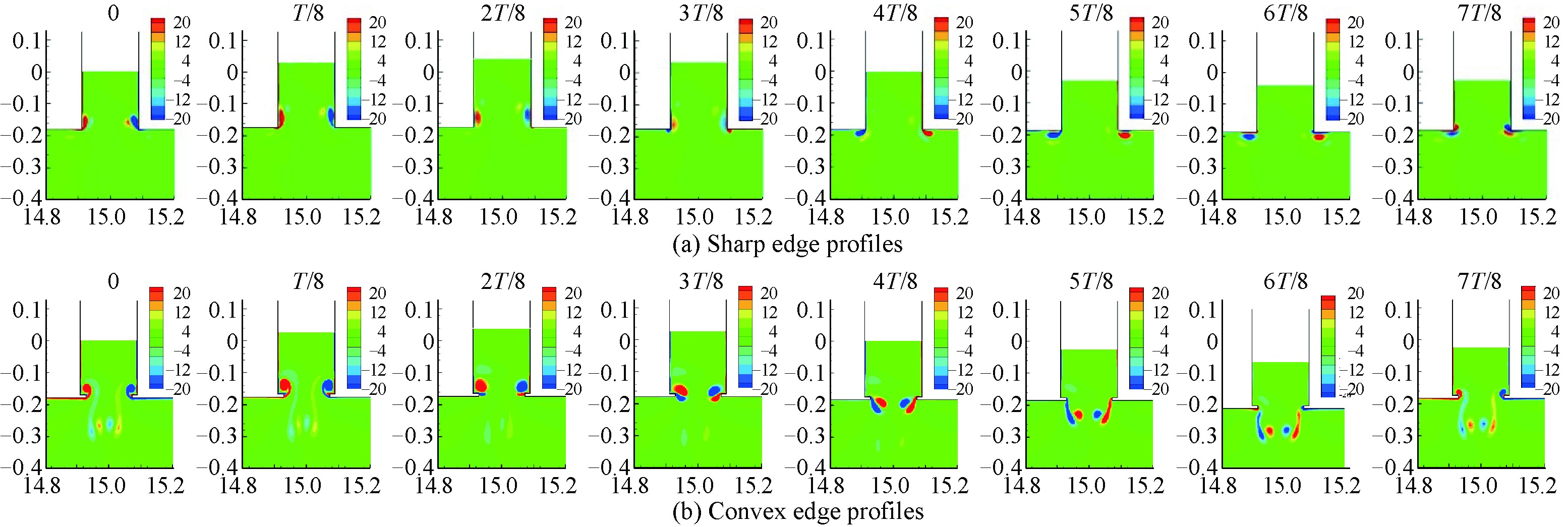
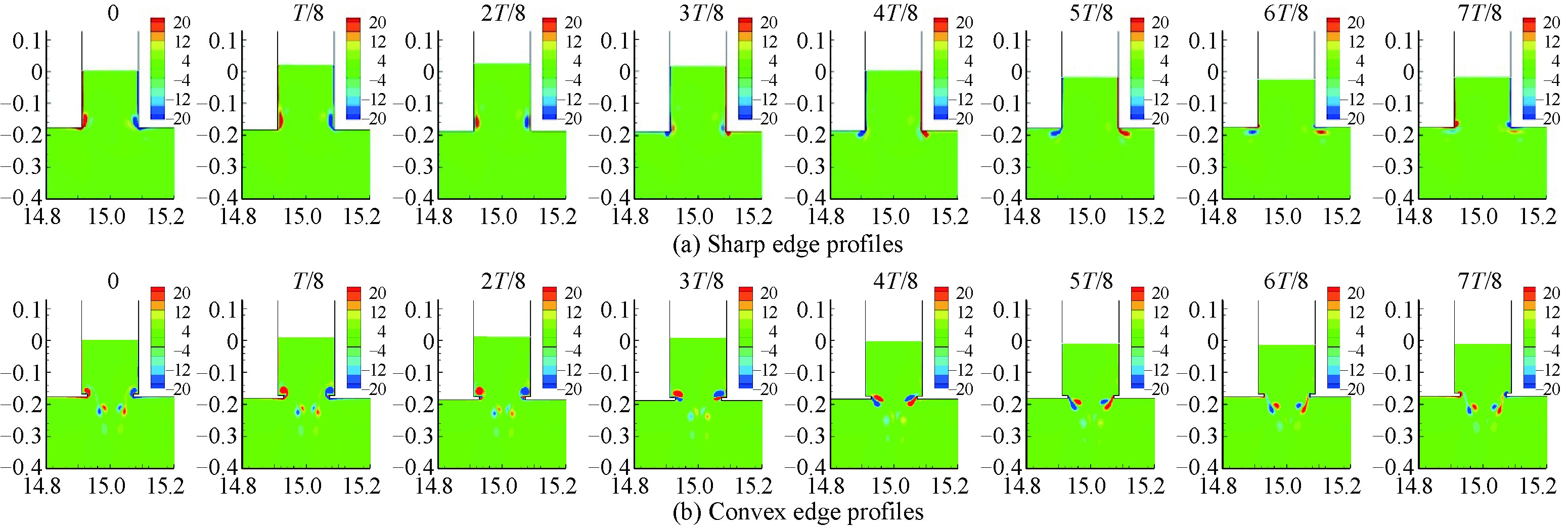
Numerical simulations on the coupling actions between the free surface oscillation in the moonpool and the heave motion response of hulls with vertical mooring stiffness are carried out in this study, where the influences of edge profiles, including sharp and convex edge profiles, on the coupling actions are considered. Two-peak variations in the free surface oscillations in the moonpool with incident wave frequencies can be observed, which are defined as the first and second peak frequencies. The free surface oscillations and heave motion responses show in-phase and out-of-phase relationships at the first and second peak frequencies, respectively. The convex edge profiles are able to generate effective suppressing actions at the second peak frequencies. However, it is only efficient for large vertical stiffness at the first peak frequency. The relative velocity between the fluid flow along the moonpool bottom and the heave motion of the hulls is the essential reason.
Numerical simulations on the coupling actions between the free surface oscillation in the moonpool and the heave motion response of hulls with vertical mooring stiffness are carried out in this study, where the influences of edge profiles, including sharp and convex edge profiles, on the coupling actions are considered. Two-peak variations in the free surface oscillations in the moonpool with incident wave frequencies can be observed, which are defined as the first and second peak frequencies. The free surface oscillations and heave motion responses show in-phase and out-of-phase relationships at the first and second peak frequencies, respectively. The convex edge profiles are able to generate effective suppressing actions at the second peak frequencies. However, it is only efficient for large vertical stiffness at the first peak frequency. The relative velocity between the fluid flow along the moonpool bottom and the heave motion of the hulls is the essential reason.


2025, 39(2)
:232-243.
doi: 10.1007/s13344-025-0024-7
Abstract:
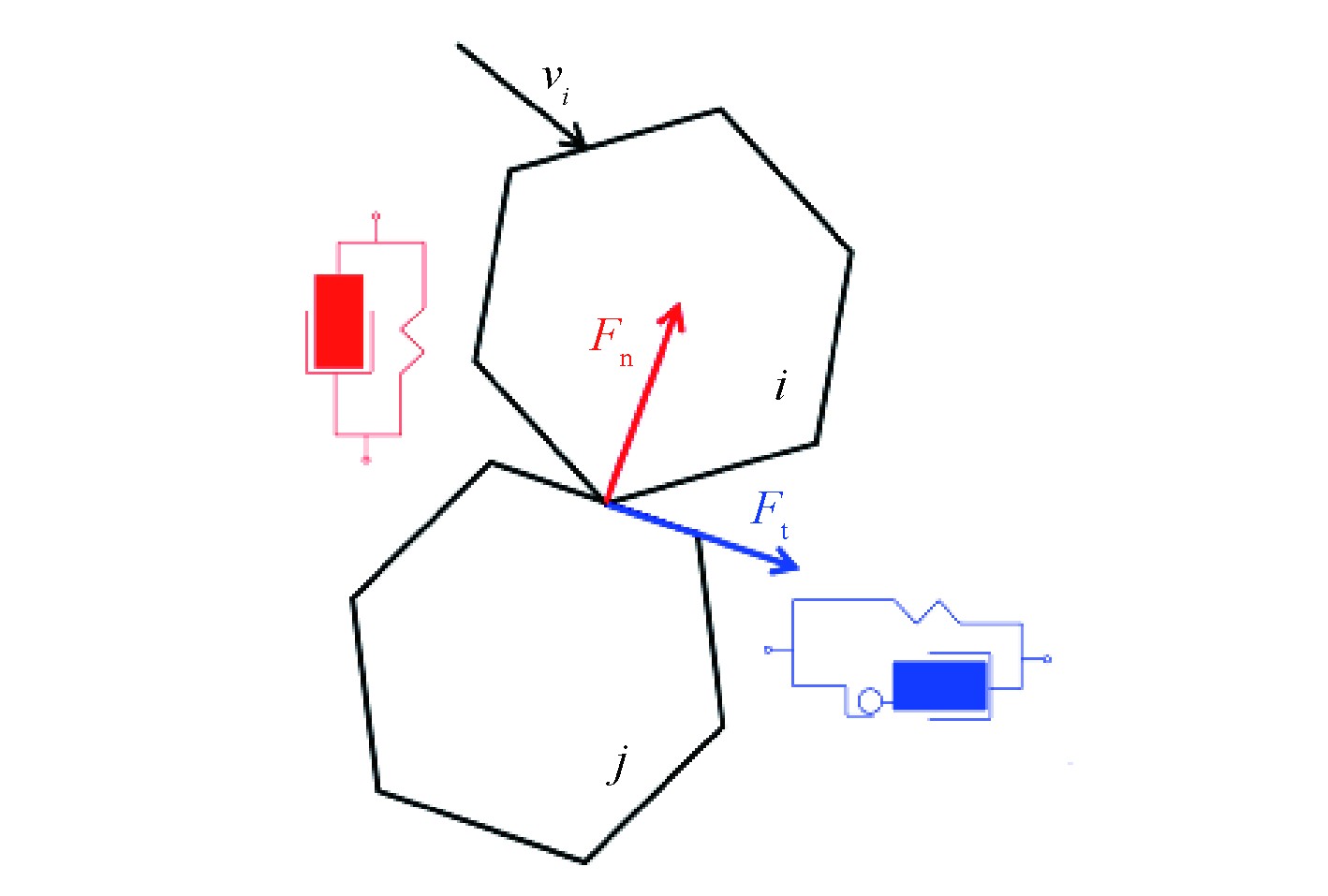
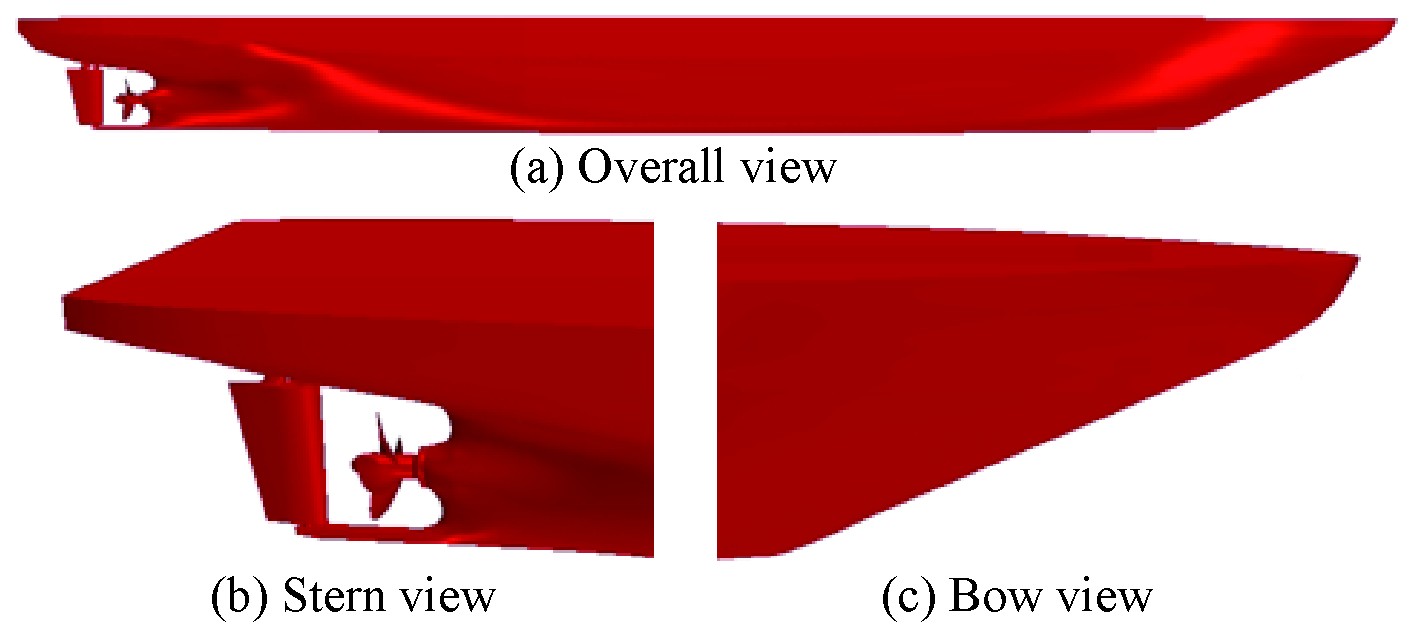
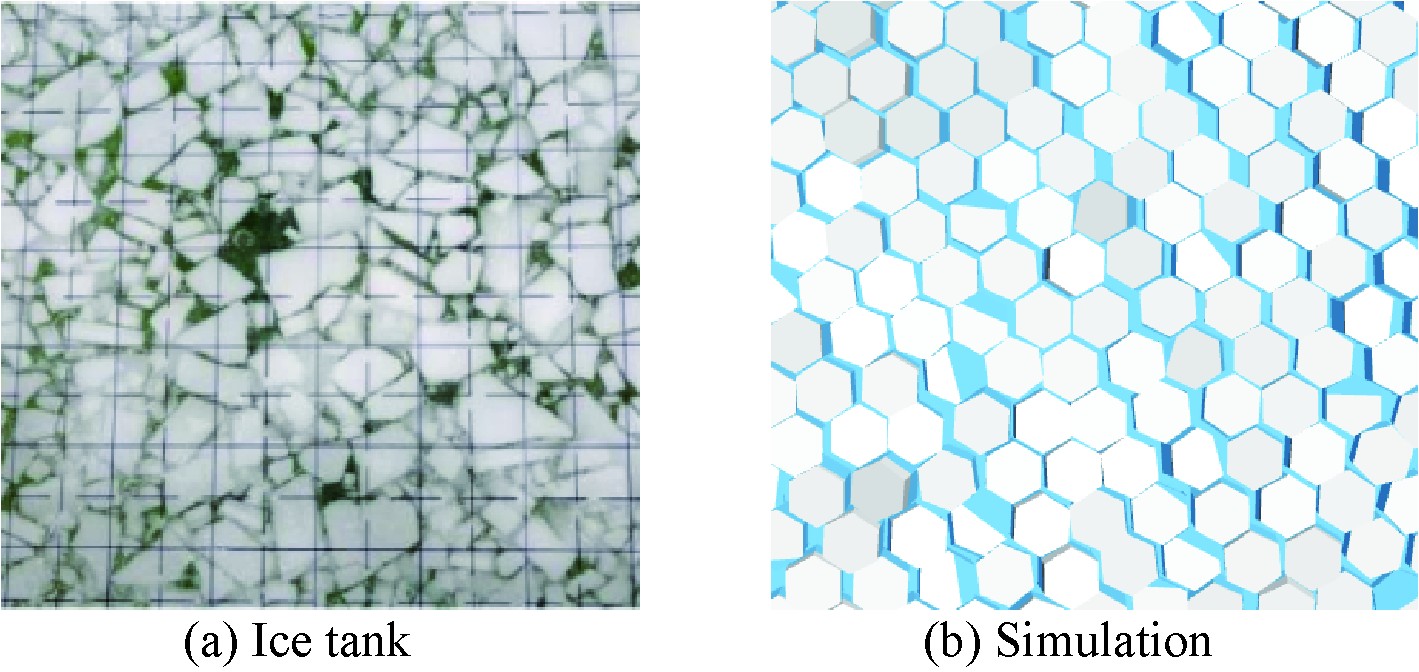
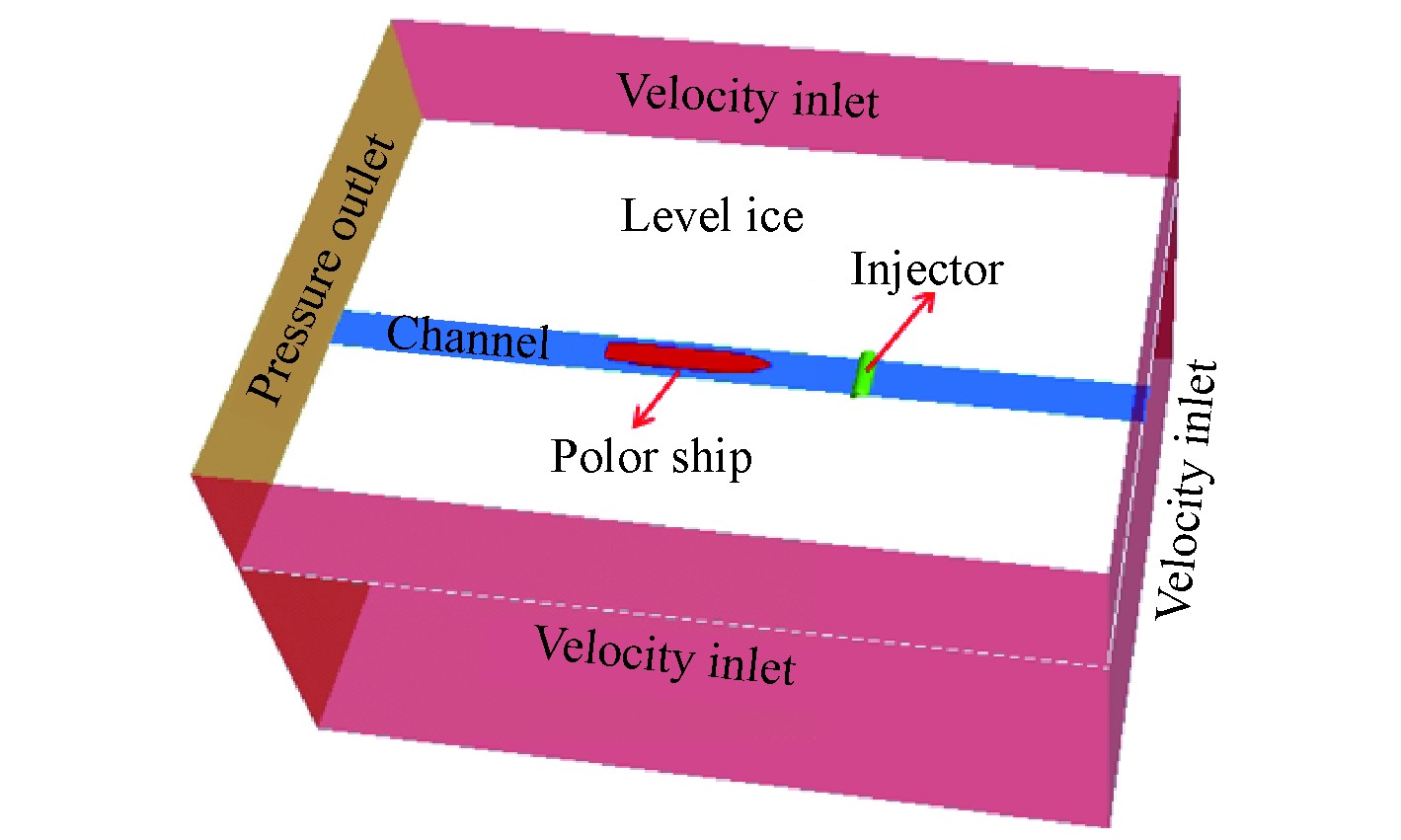
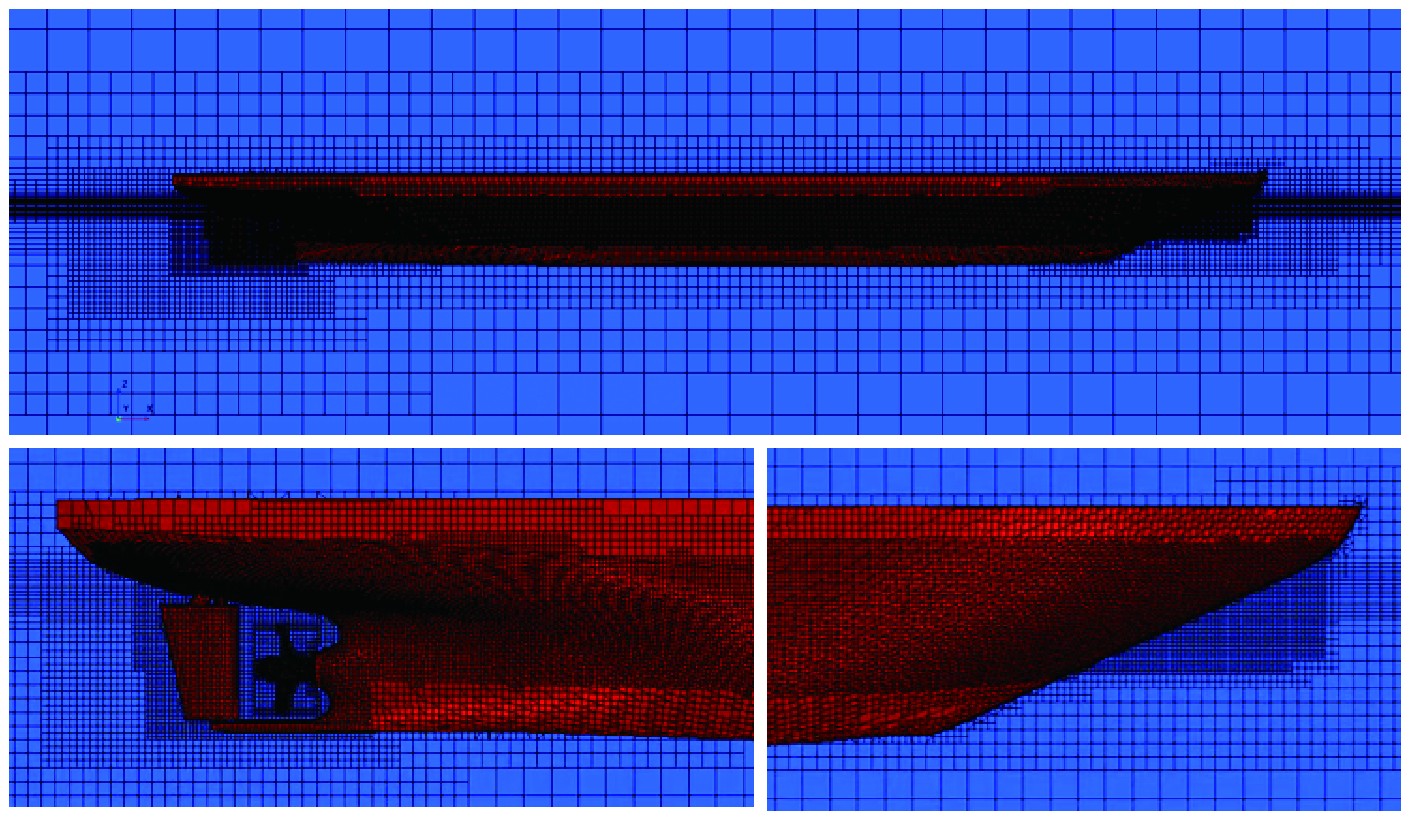
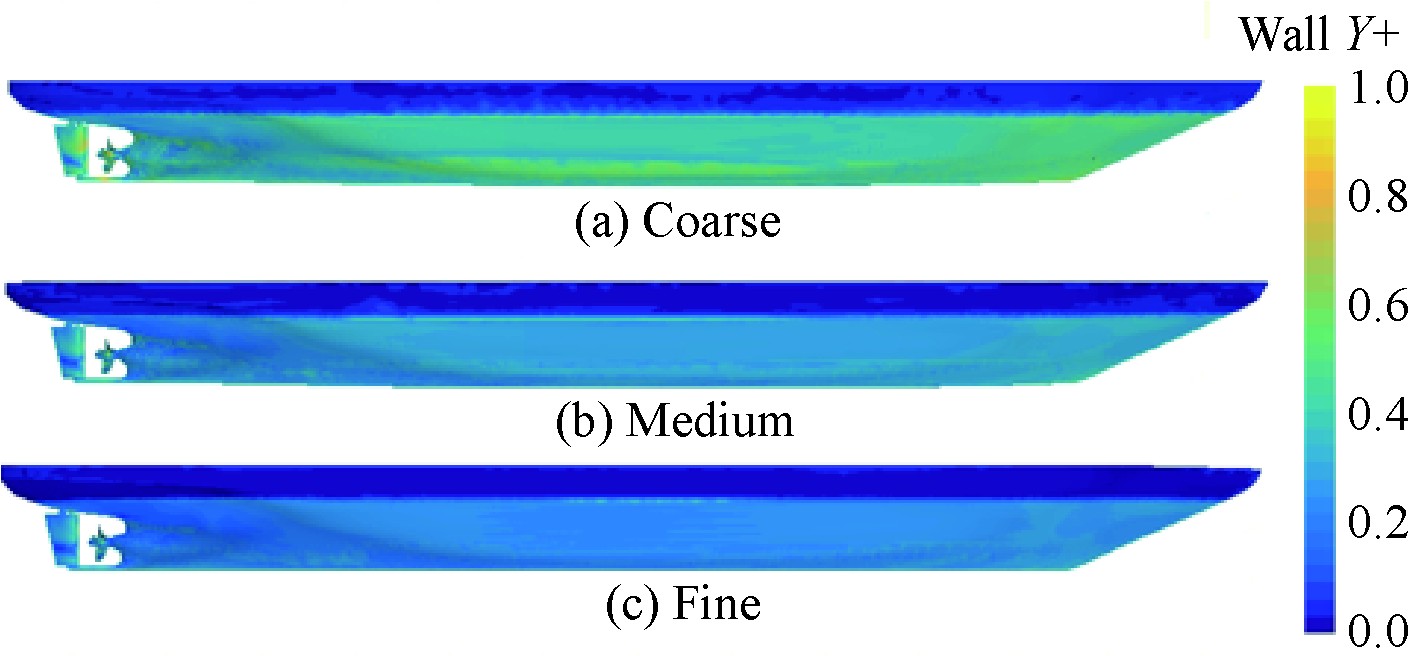
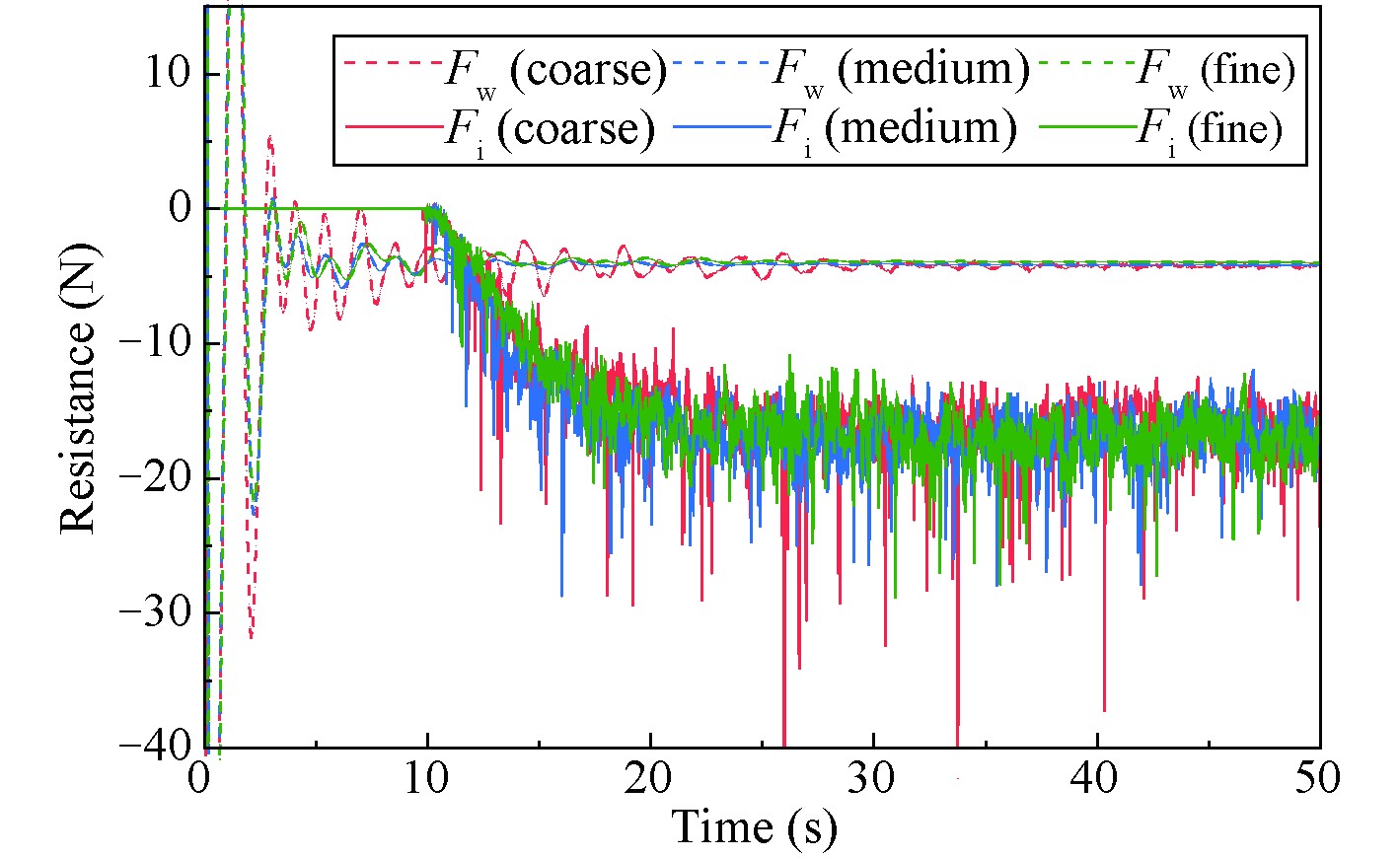
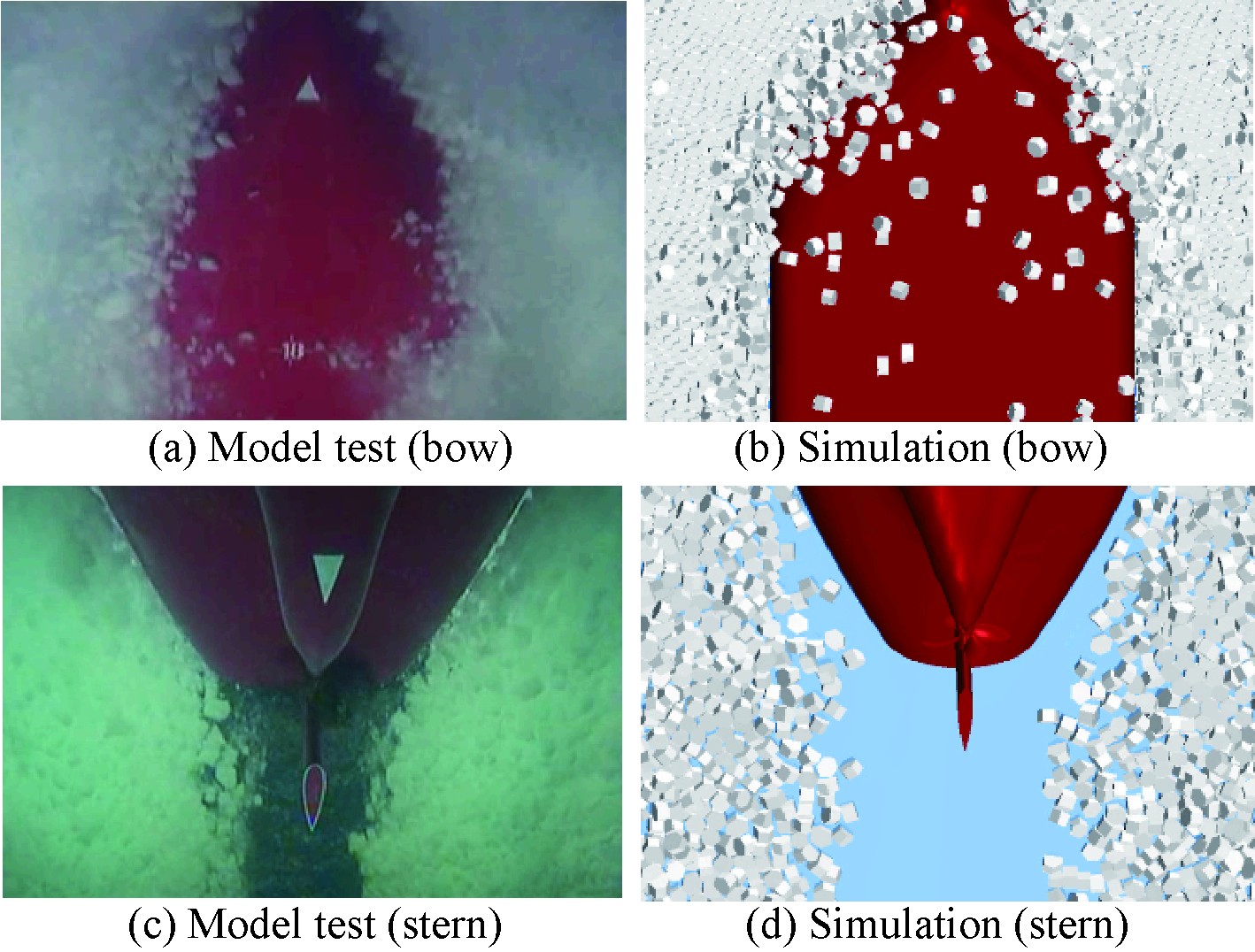
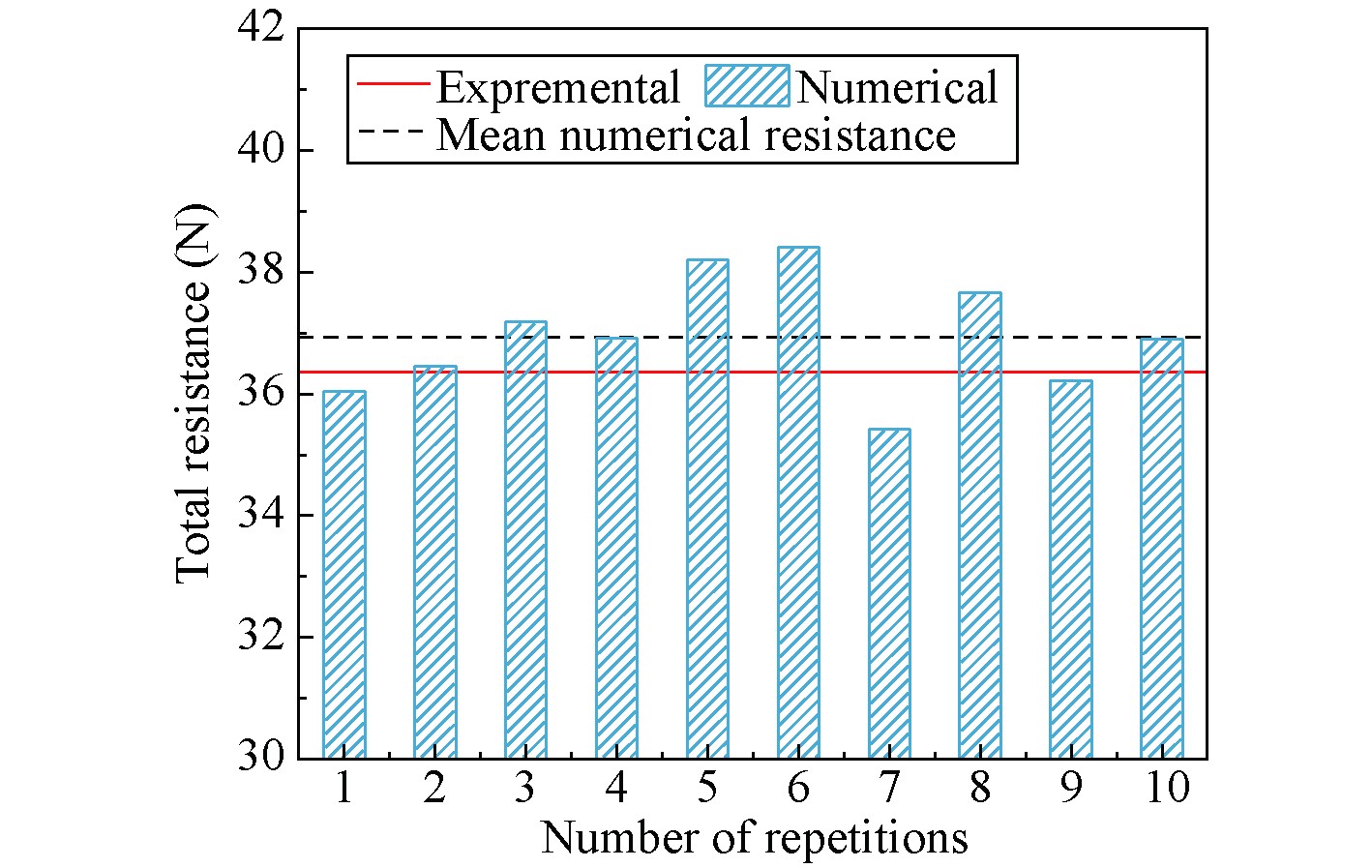
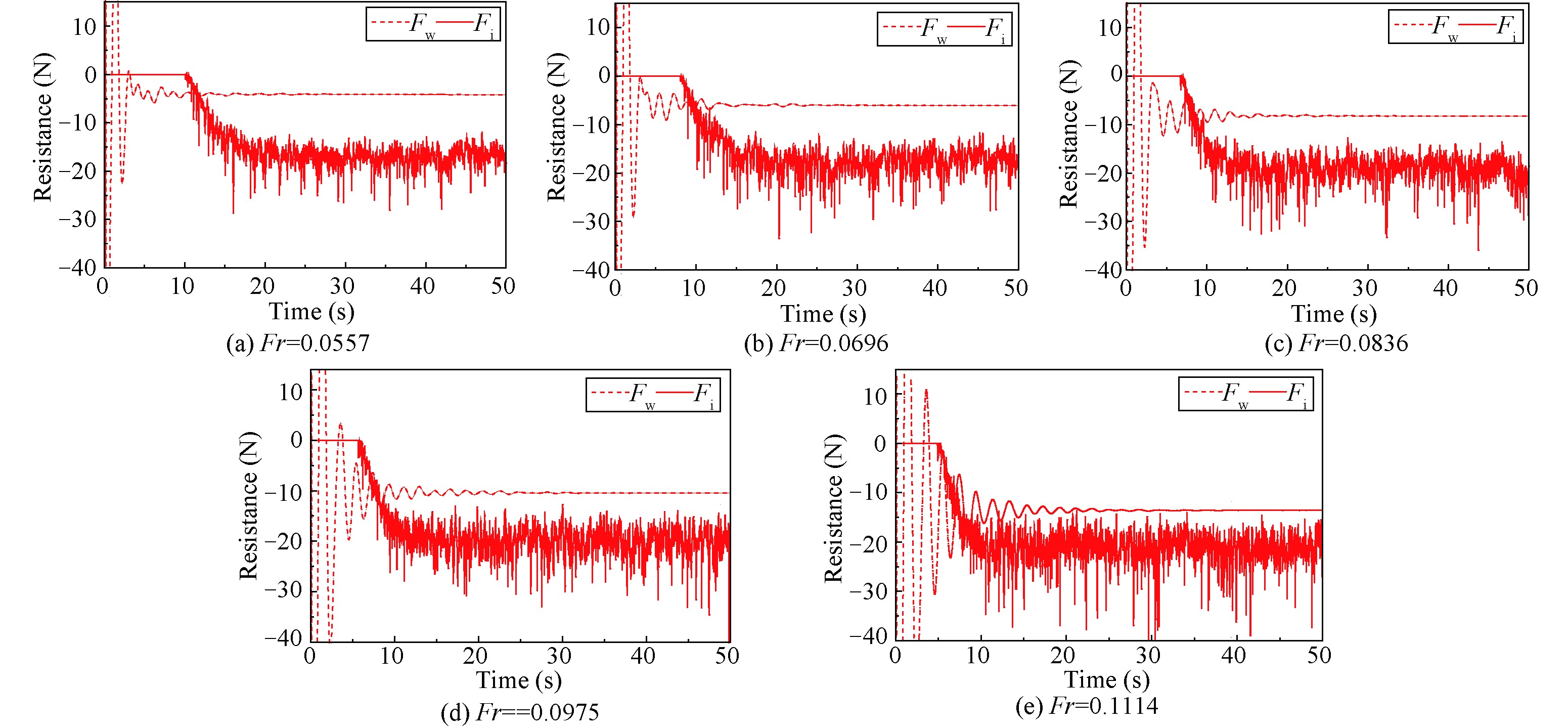
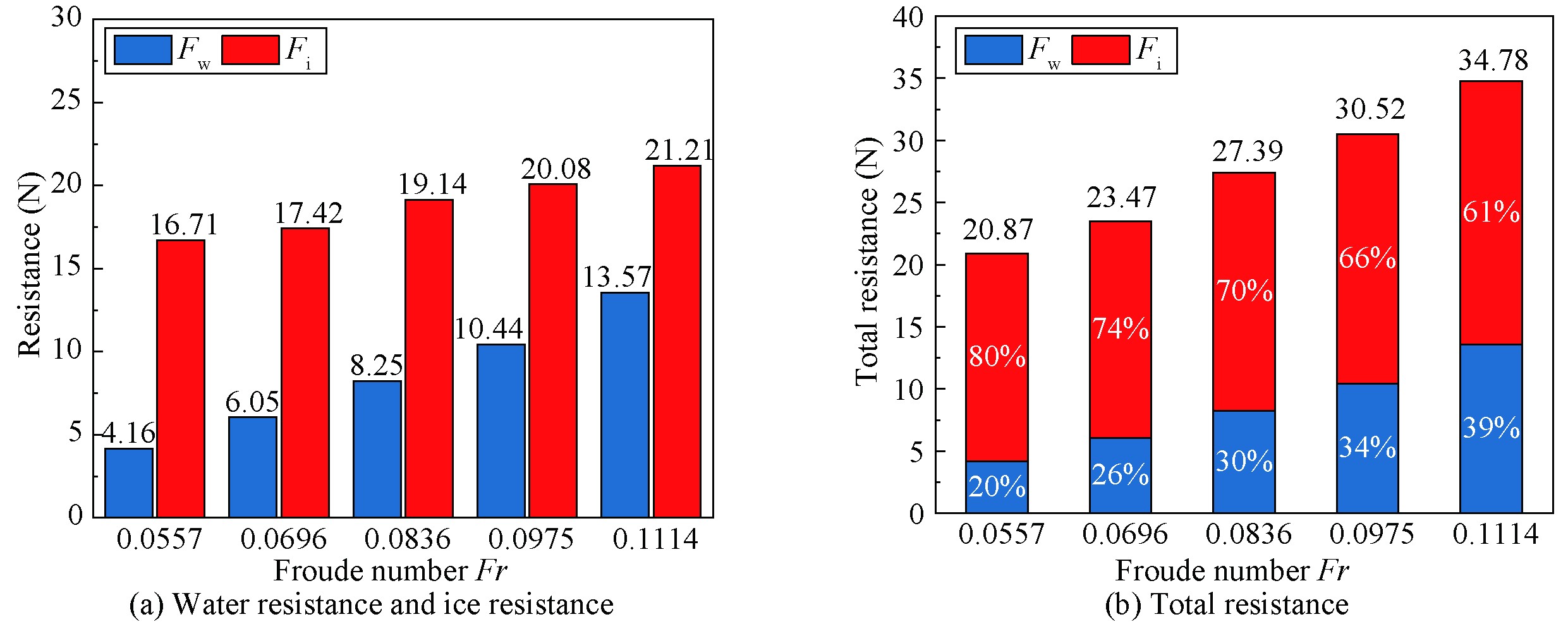
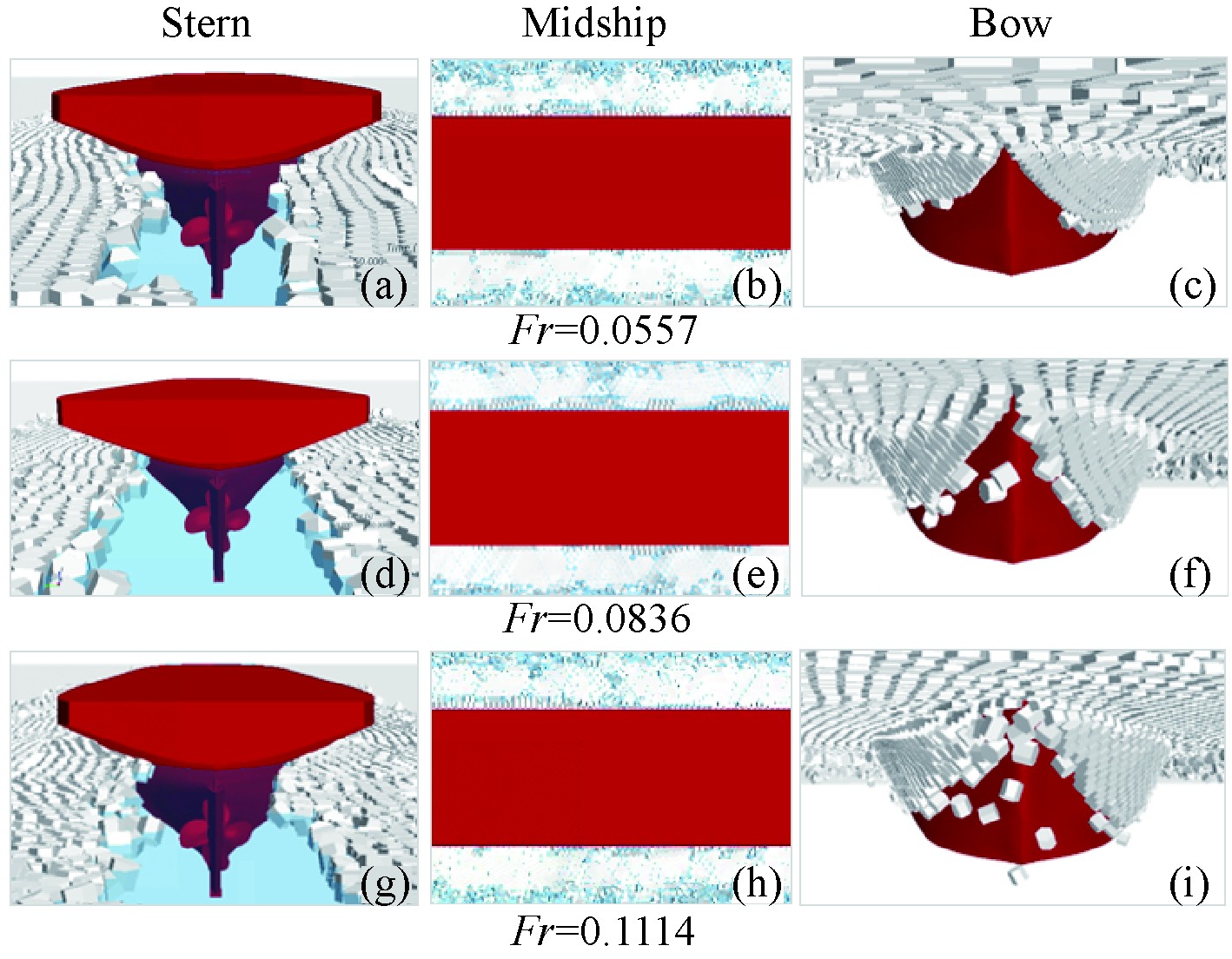
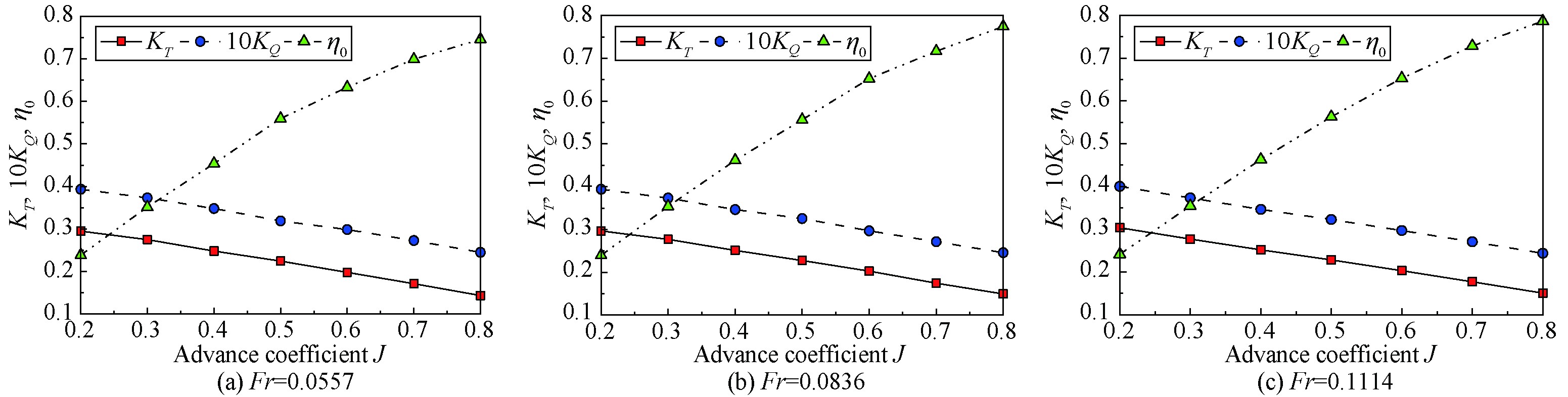
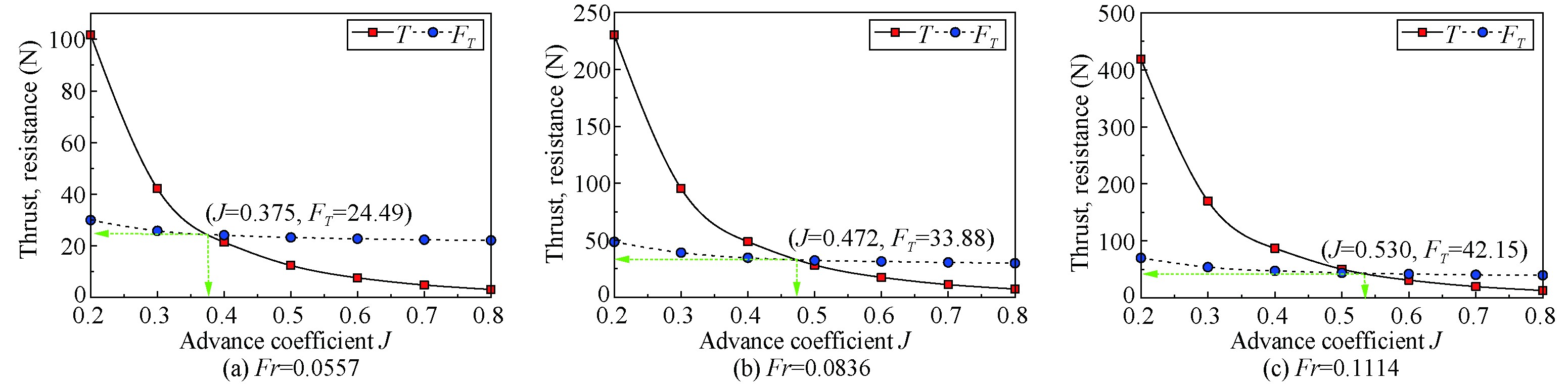
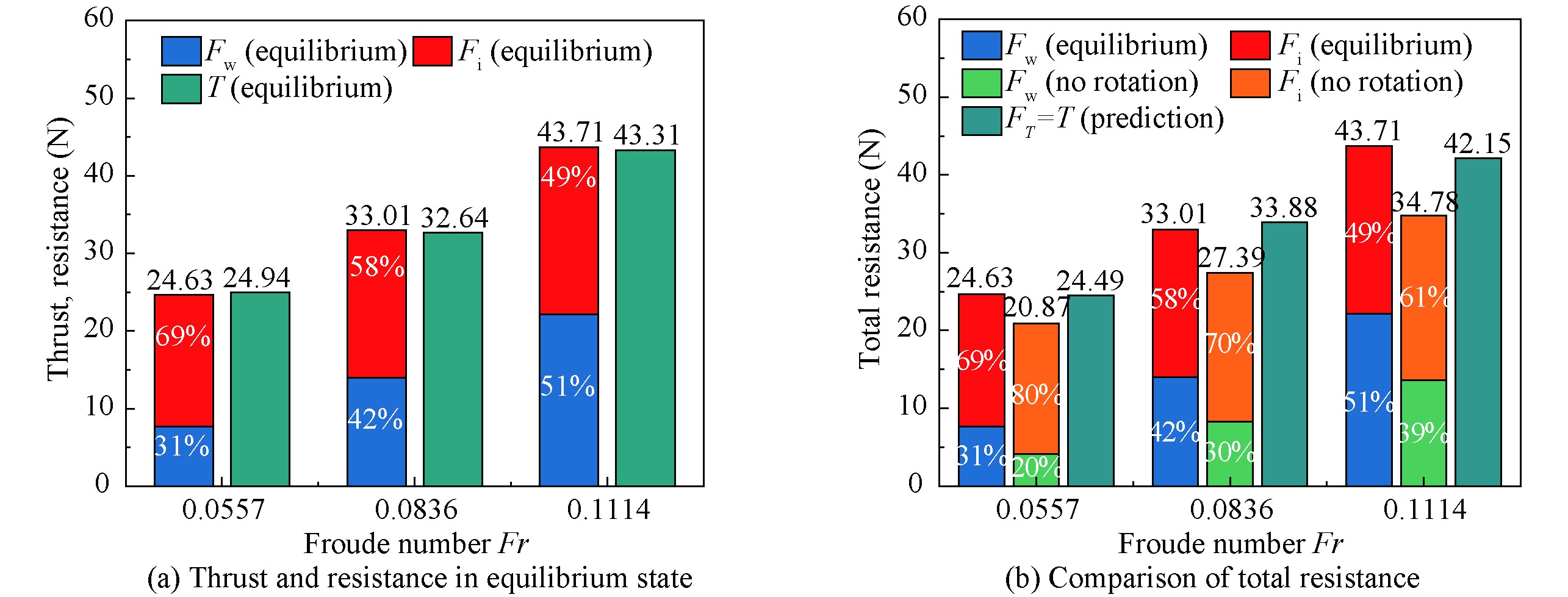
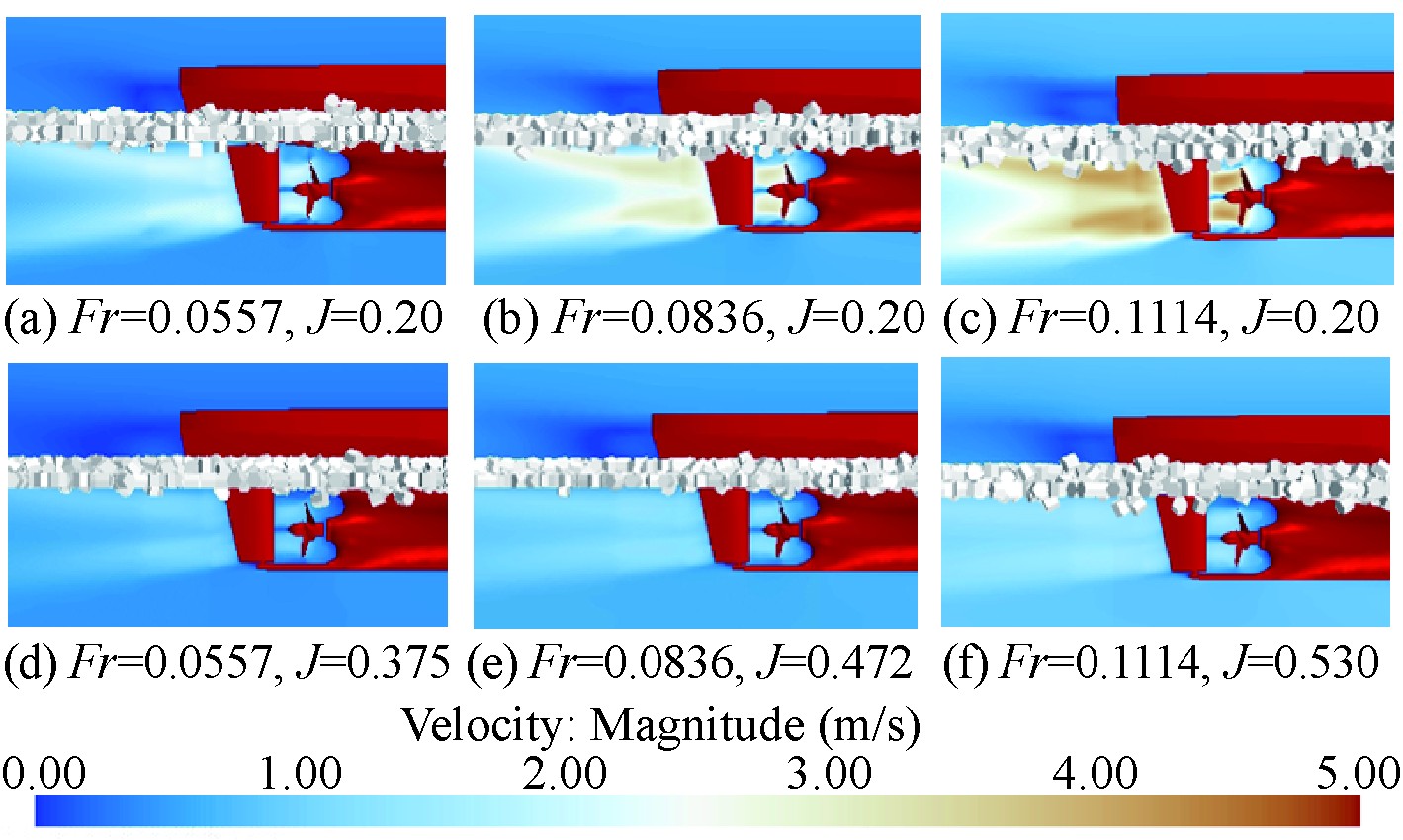
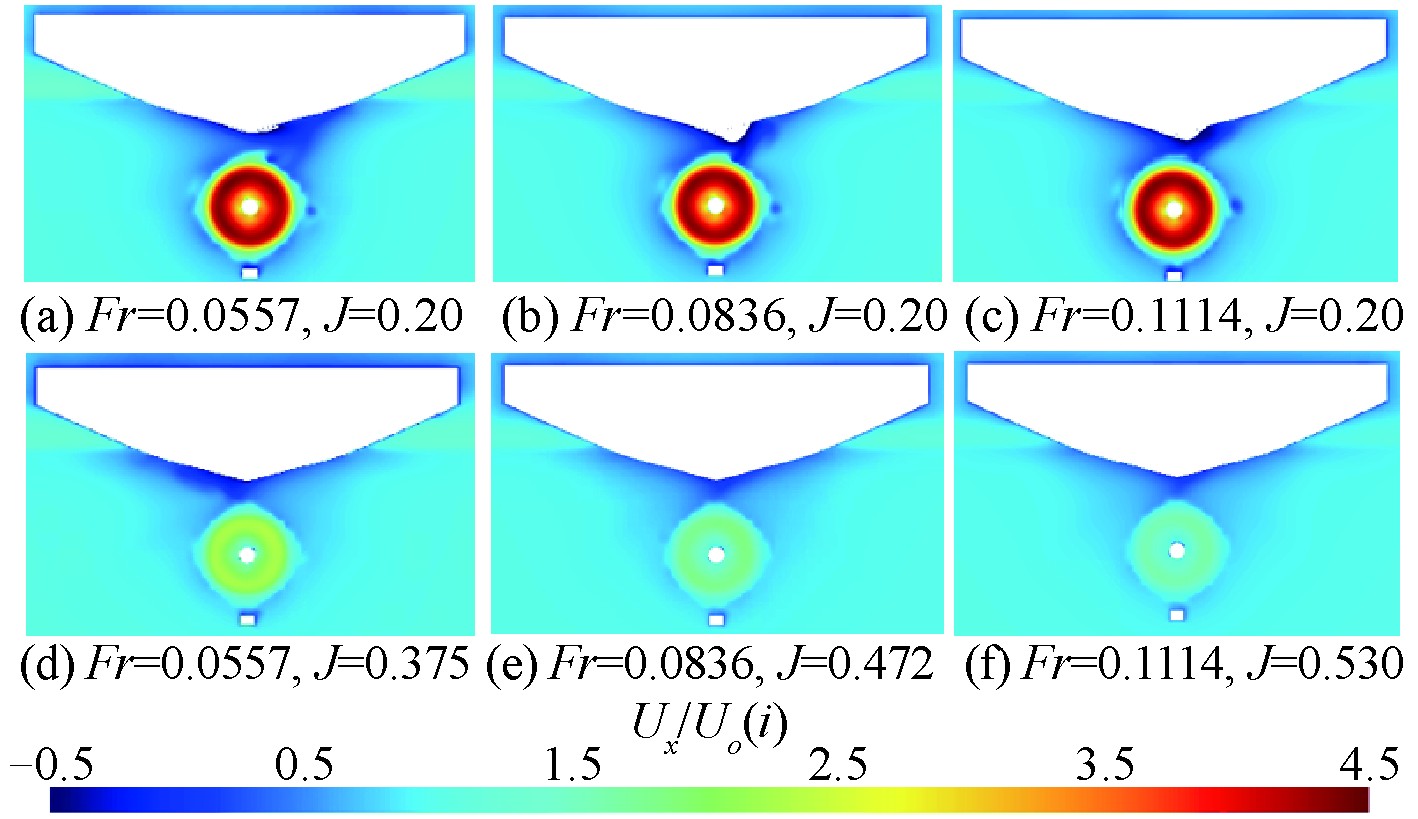
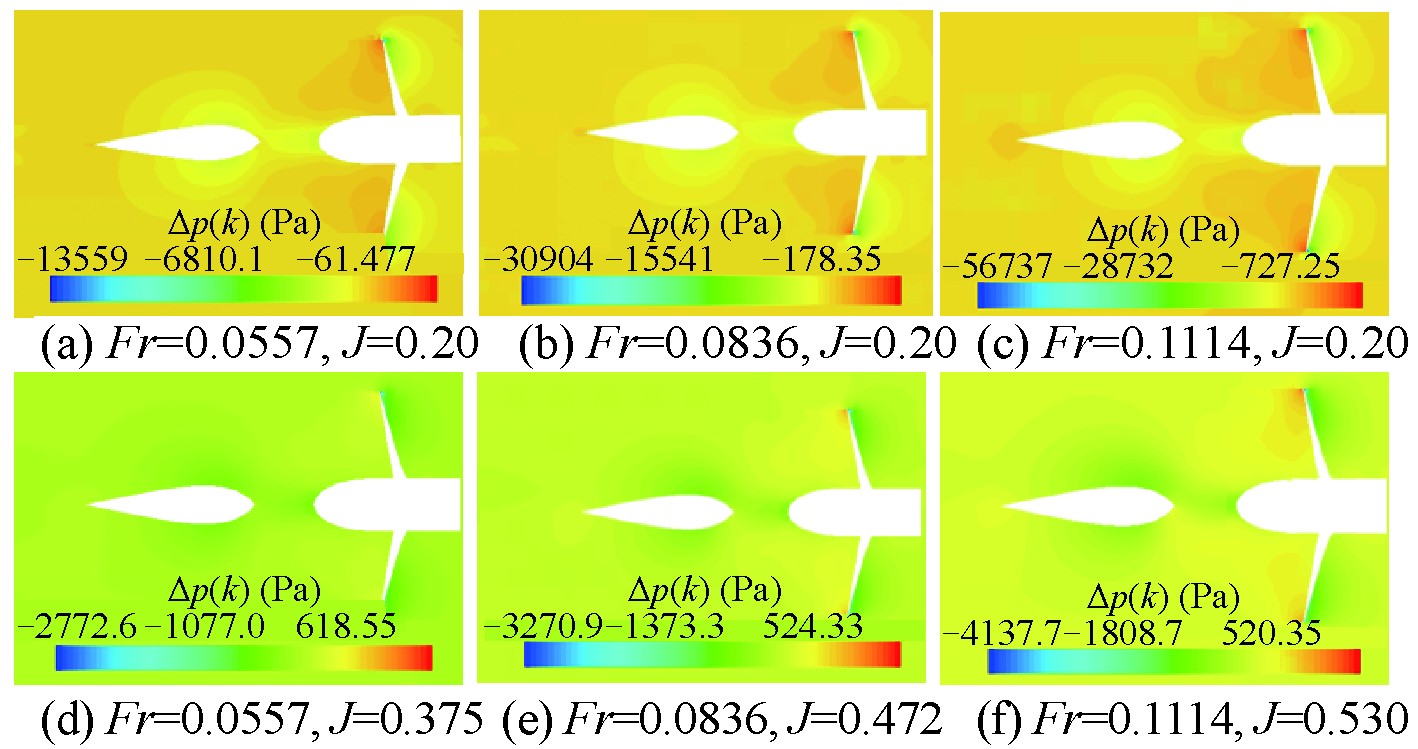
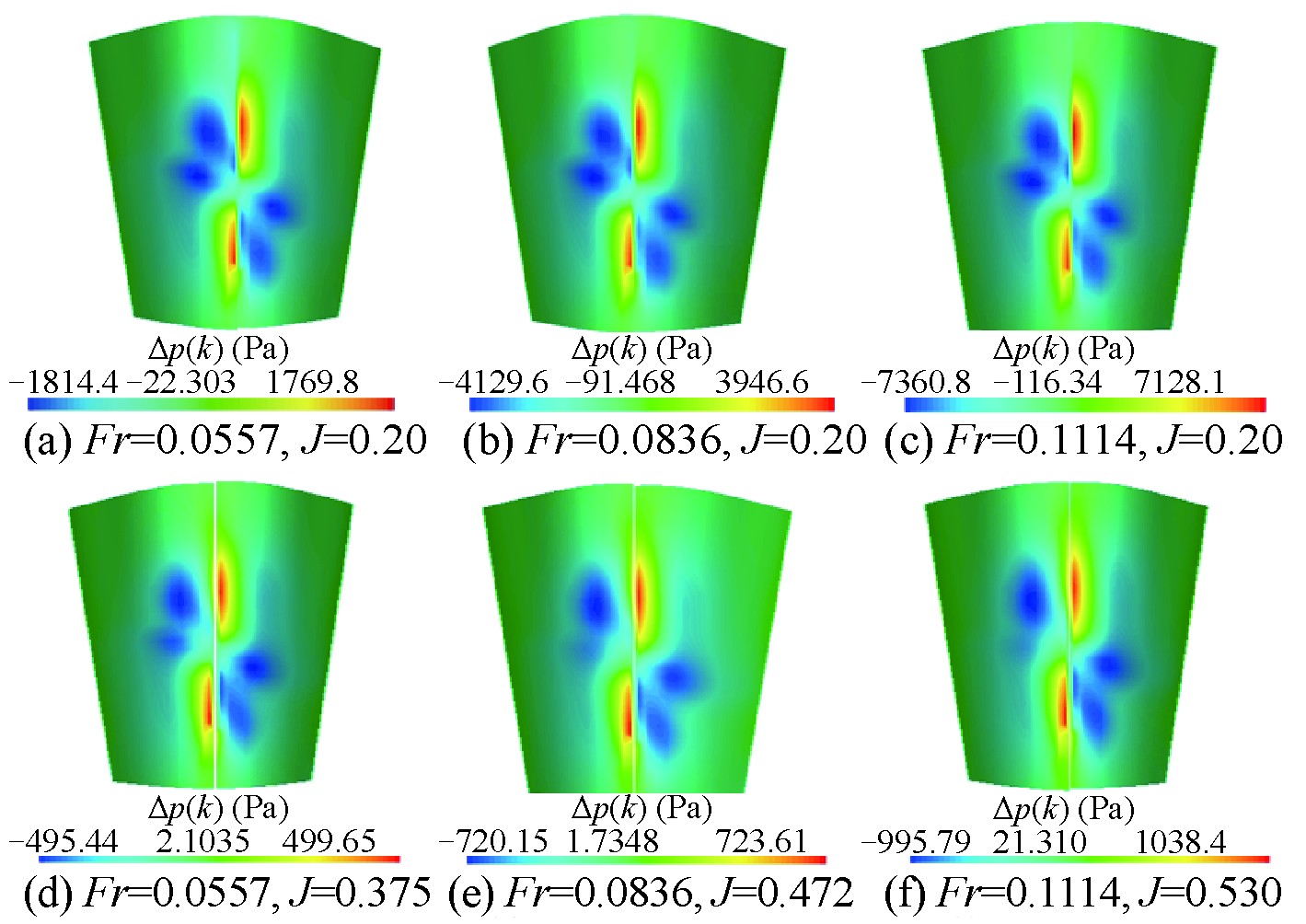
Polar marine equipment plays an important role in Arctic engineering, especially in the development of polar ships and ice-class propellers. When polar ships navigate in brash ice channels, the brash ice not only increases resistance but also has adverse effects on their propulsion performance. On the basis of coupled computational fluid dynamics (CFD) and the discrete element method (DEM), this paper aims to numerically investigate the resistance and propulsion performance of a polar in a brash ice channel while considering the rotation status of the propeller by both experimental and numerical methods. Both ship resistance and ice motion under Froude numbers of 0.0557, 0.0696, 0.0836, 0.975, and 0.1114 are studied when the propeller does not rotate. The influences of the rotating propeller on the ice brash resistance and flow are discussed. The thrust due to the propeller and ice resistance in the equilibrium state are also predicted. The errors between the thrust and total resistance are approximately 1.0%, and the maximum error between the simulated and predicted total resistance is 3.7%, which validates the CFD-DEM coupling method quite well. This work could provide a theoretical basis for the initial design of polar ships with low ice class notation and assist in planning navigation for merchant polar ships in brash ice fields.
Polar marine equipment plays an important role in Arctic engineering, especially in the development of polar ships and ice-class propellers. When polar ships navigate in brash ice channels, the brash ice not only increases resistance but also has adverse effects on their propulsion performance. On the basis of coupled computational fluid dynamics (CFD) and the discrete element method (DEM), this paper aims to numerically investigate the resistance and propulsion performance of a polar in a brash ice channel while considering the rotation status of the propeller by both experimental and numerical methods. Both ship resistance and ice motion under Froude numbers of 0.0557, 0.0696, 0.0836, 0.975, and 0.1114 are studied when the propeller does not rotate. The influences of the rotating propeller on the ice brash resistance and flow are discussed. The thrust due to the propeller and ice resistance in the equilibrium state are also predicted. The errors between the thrust and total resistance are approximately 1.0%, and the maximum error between the simulated and predicted total resistance is 3.7%, which validates the CFD-DEM coupling method quite well. This work could provide a theoretical basis for the initial design of polar ships with low ice class notation and assist in planning navigation for merchant polar ships in brash ice fields.
2025, 39(2)
:244-255.
doi: 10.1007/s13344-025-0034-5
Abstract:
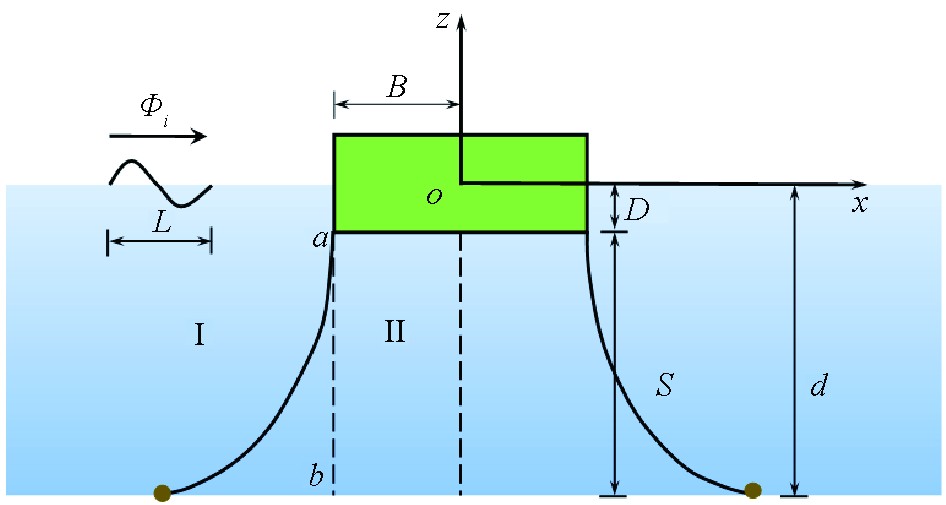
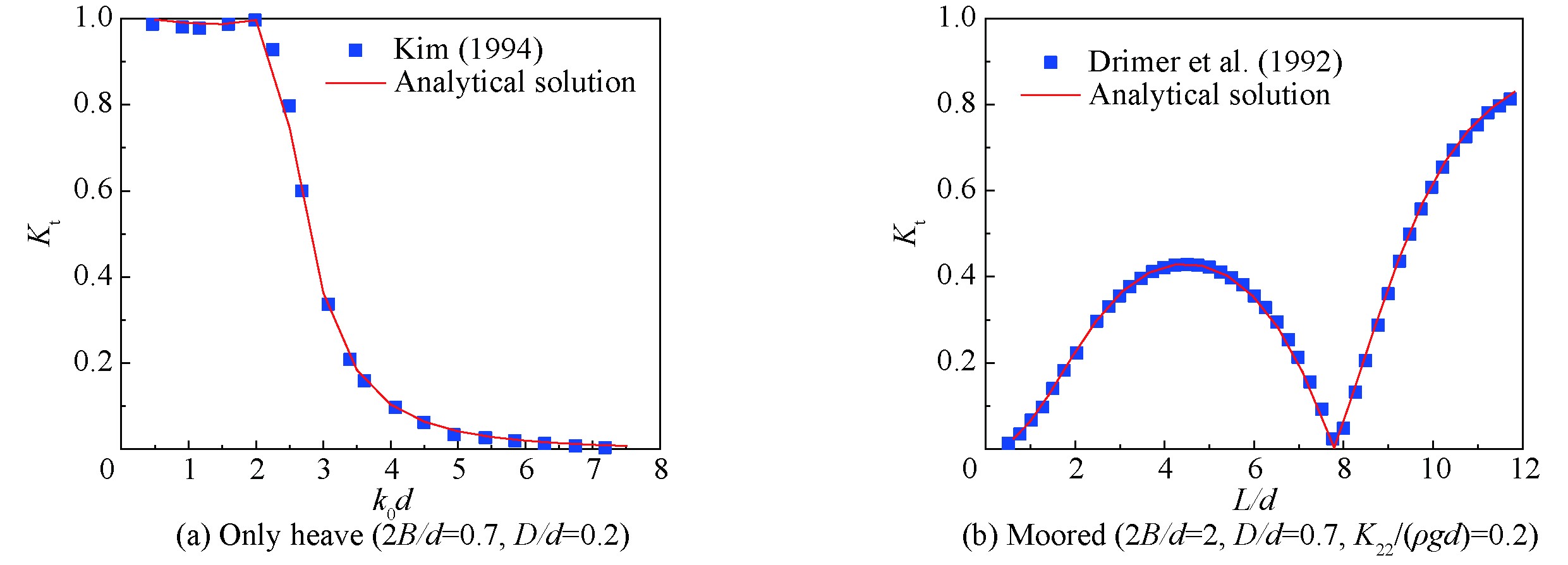
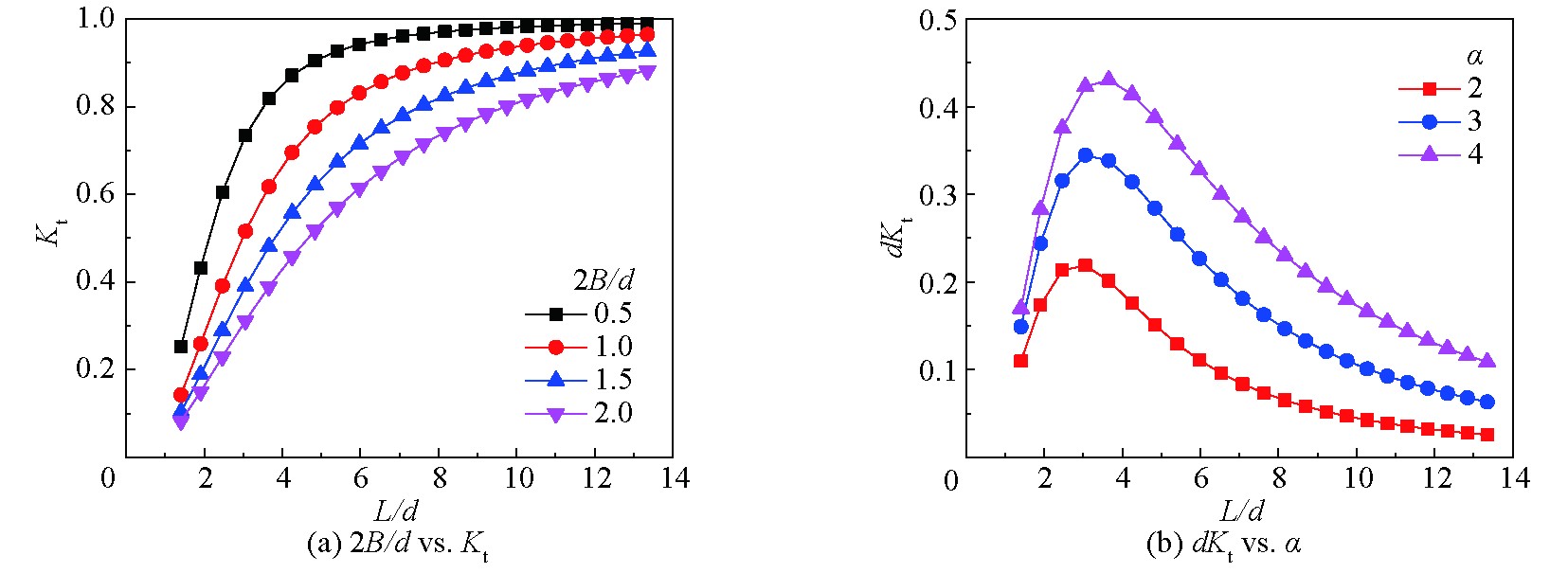
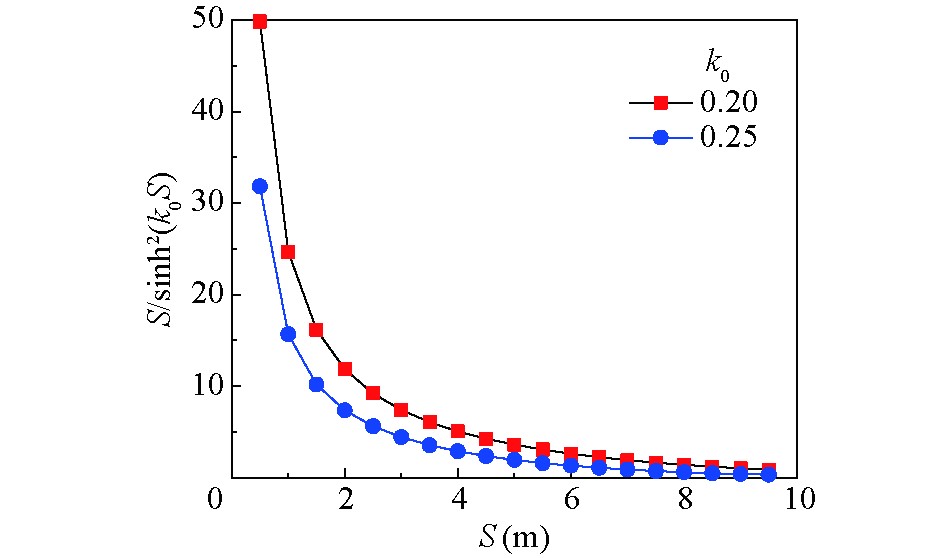
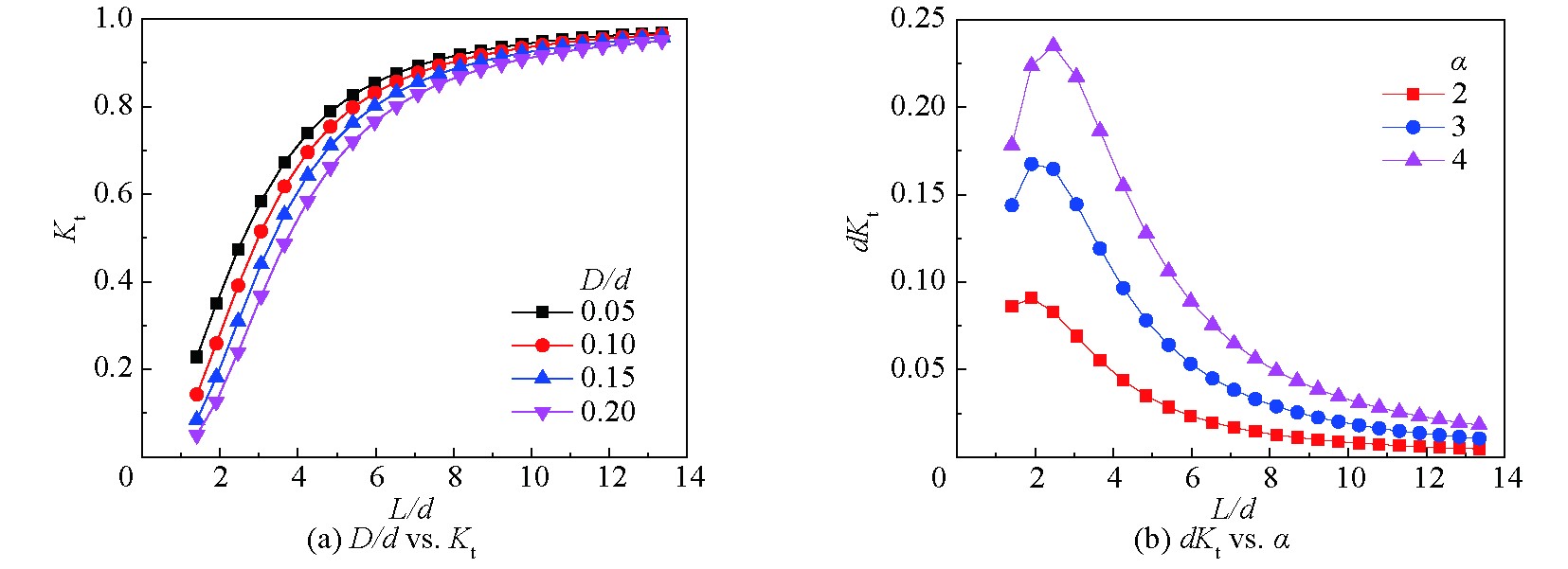
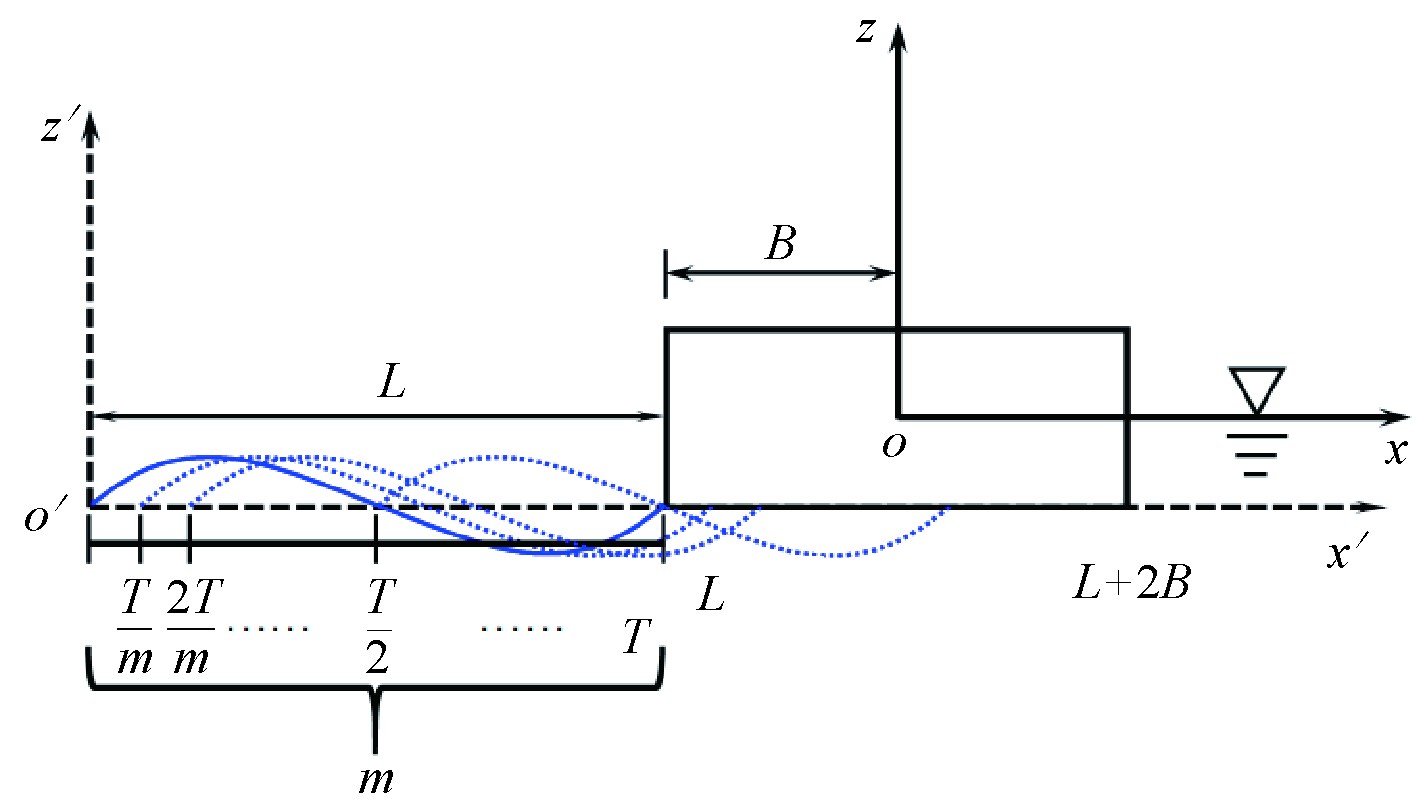
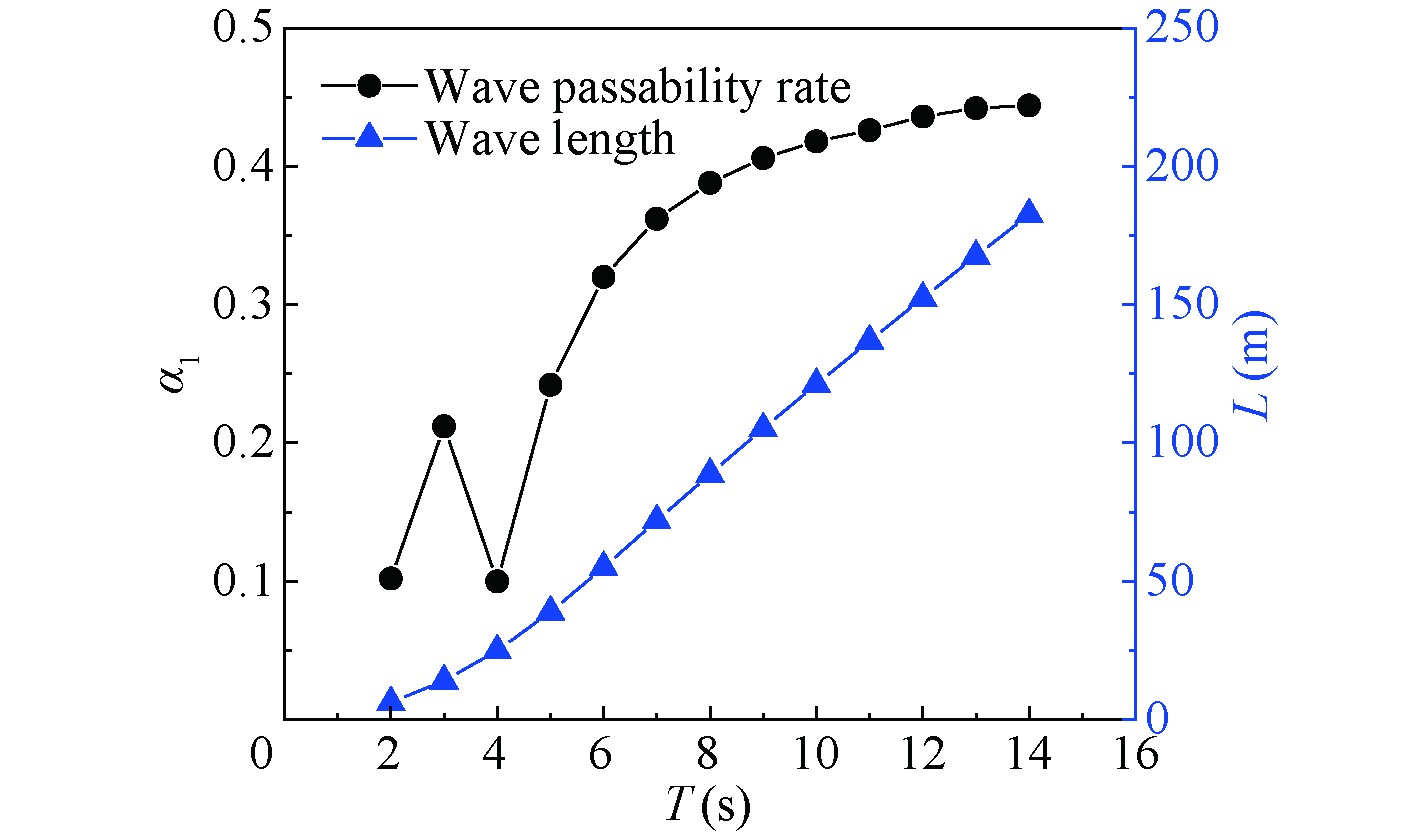
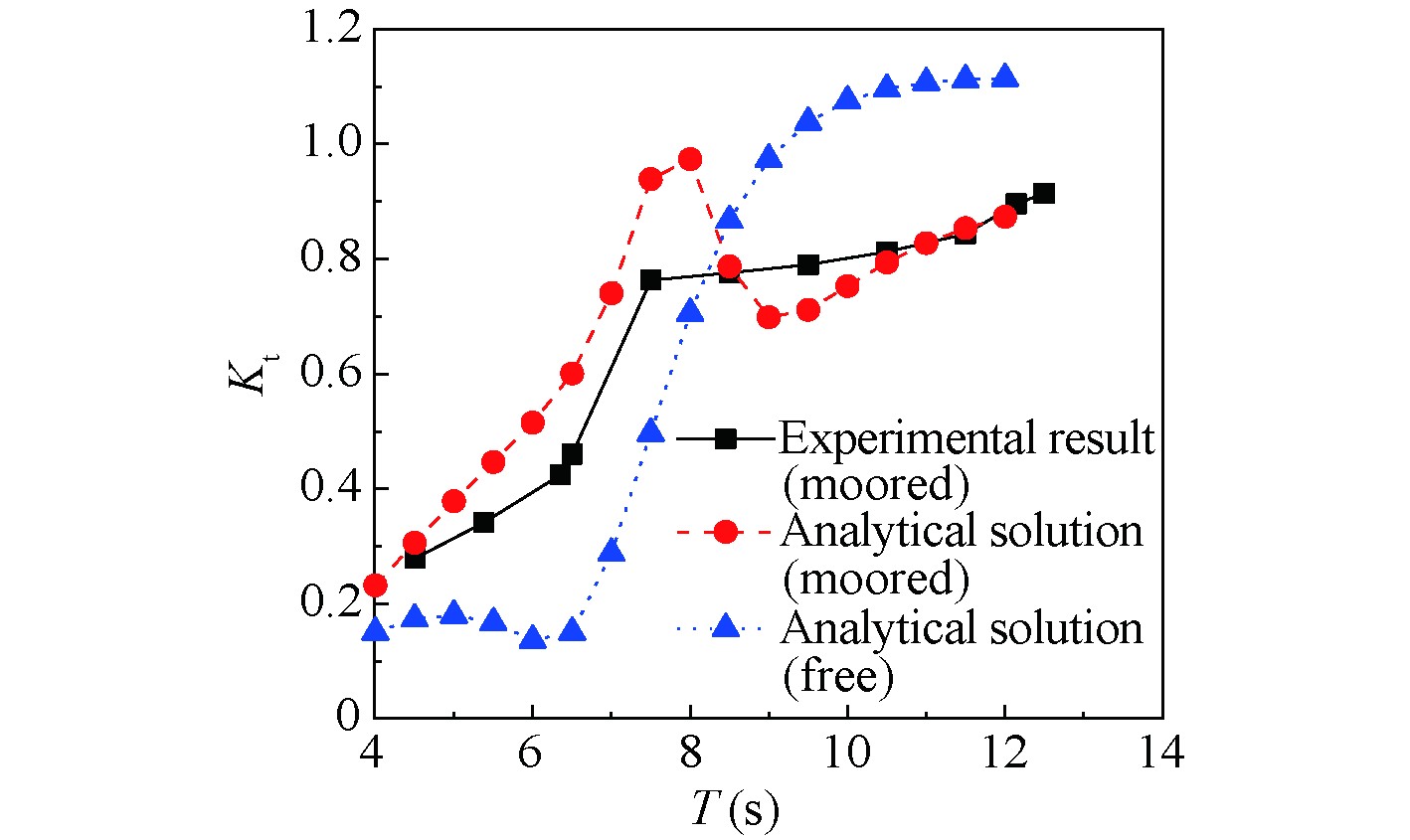
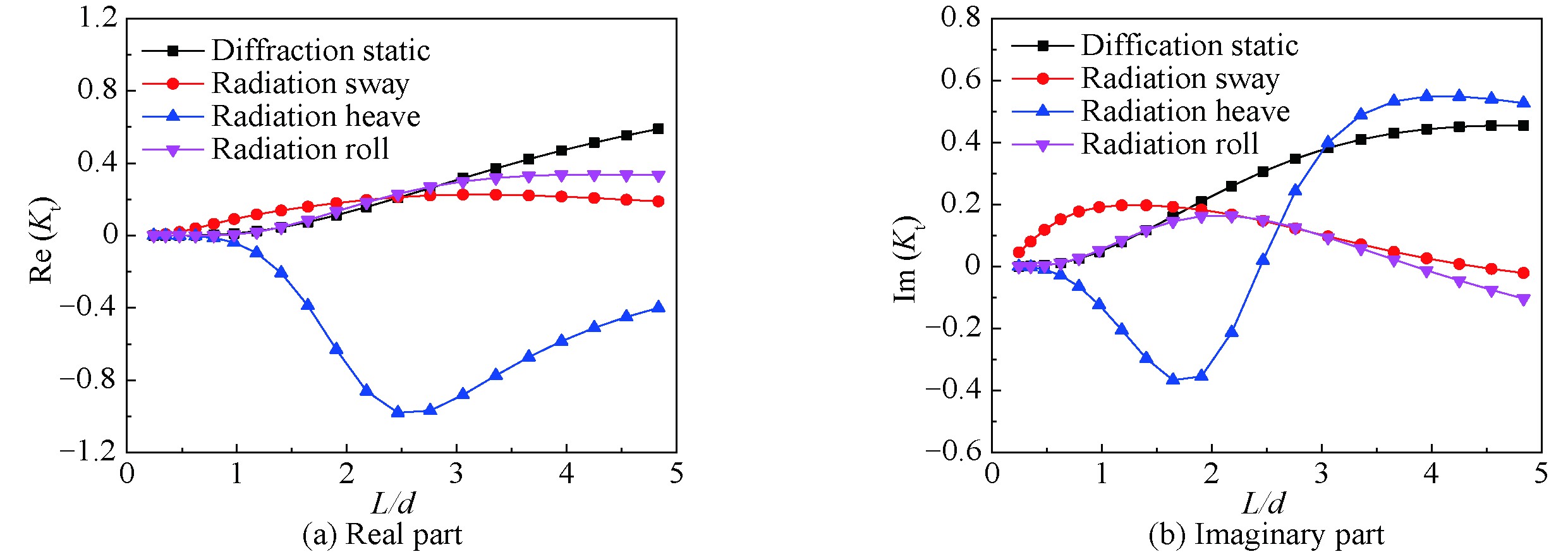
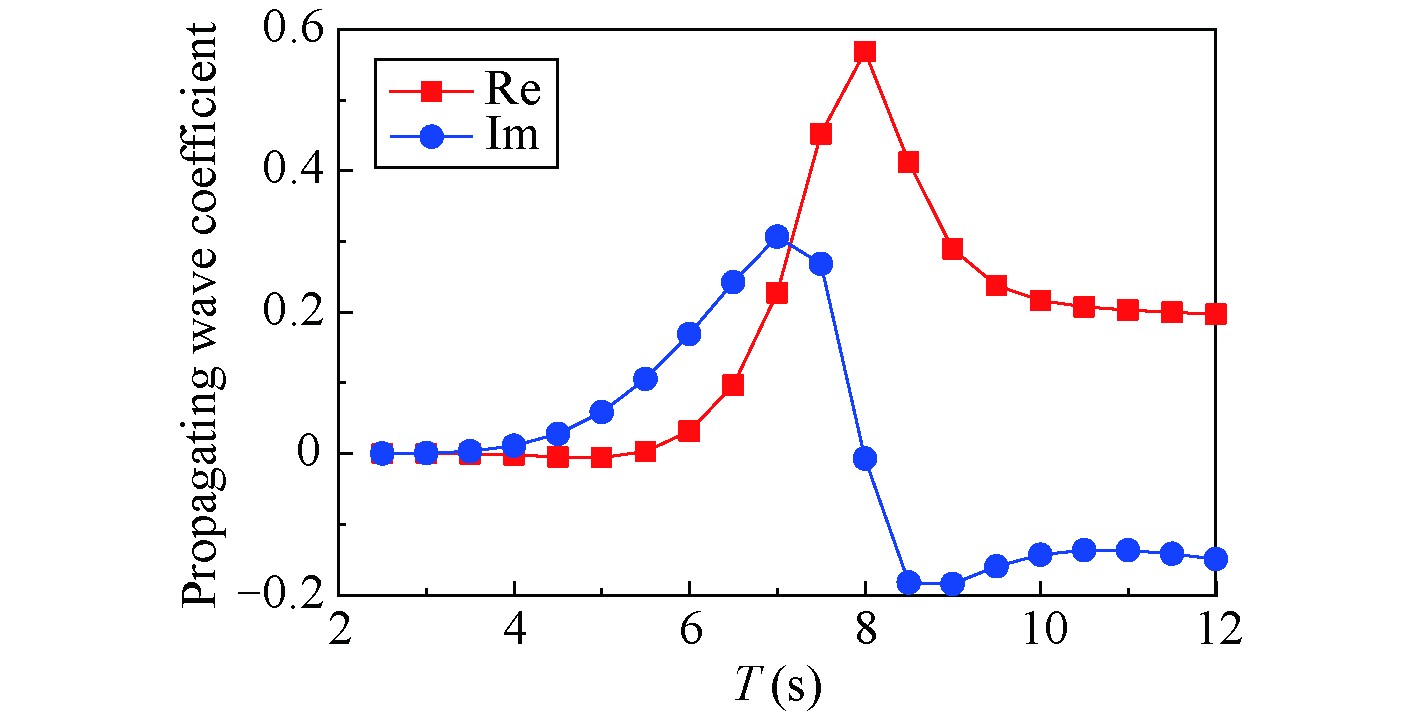
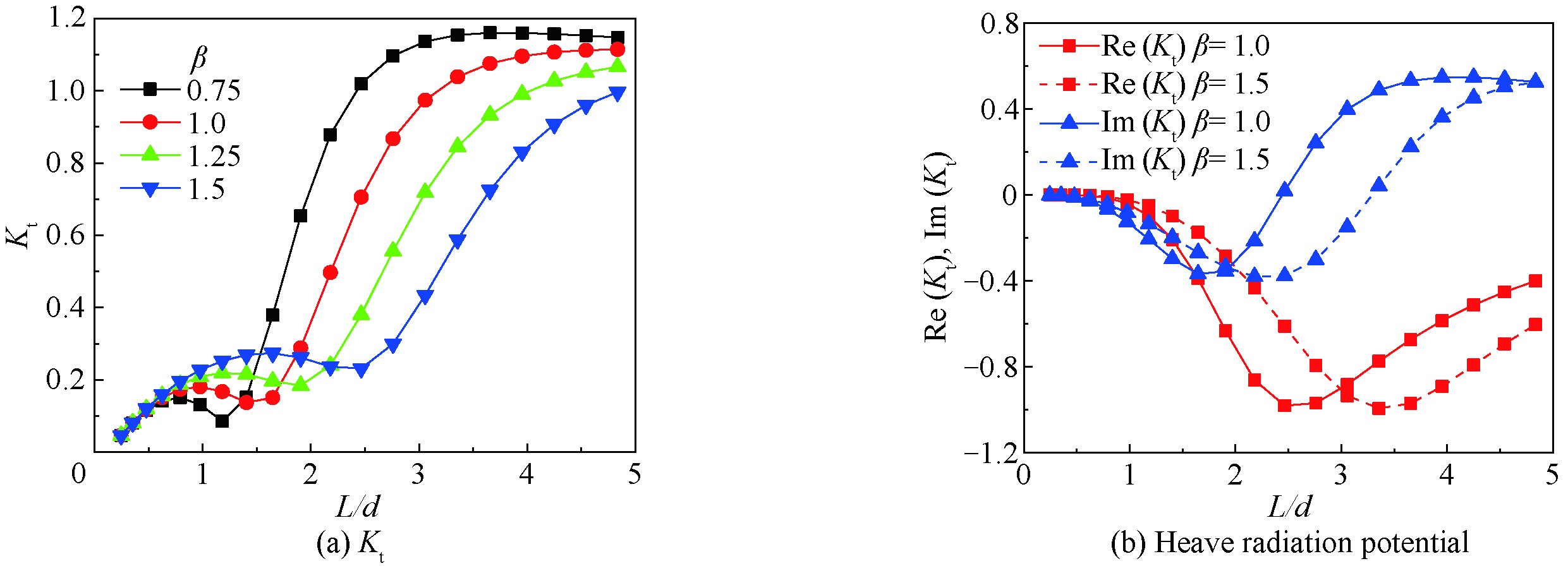
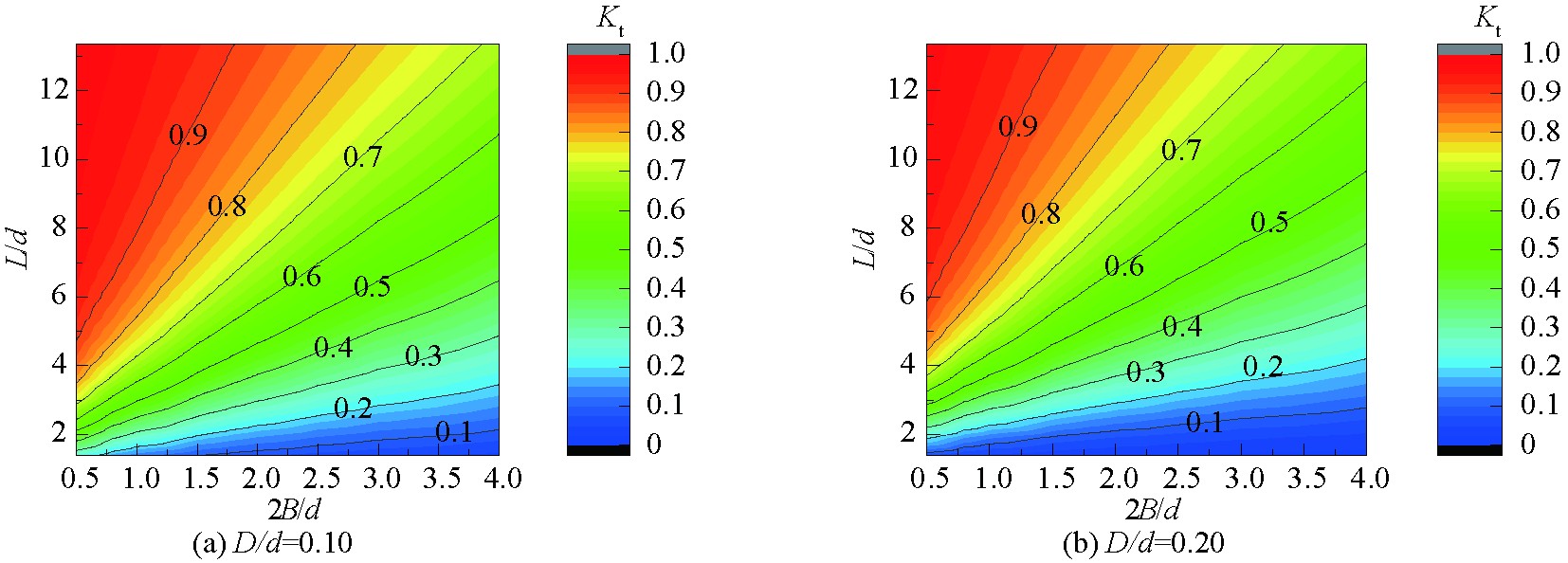
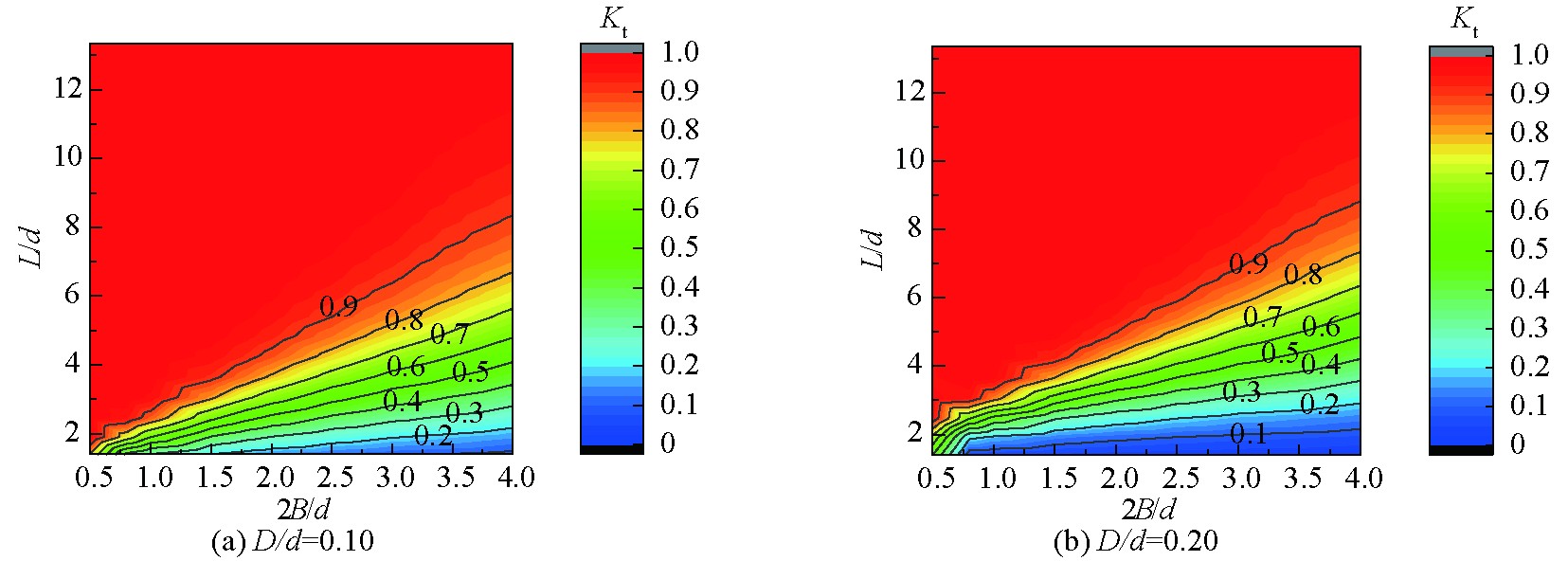
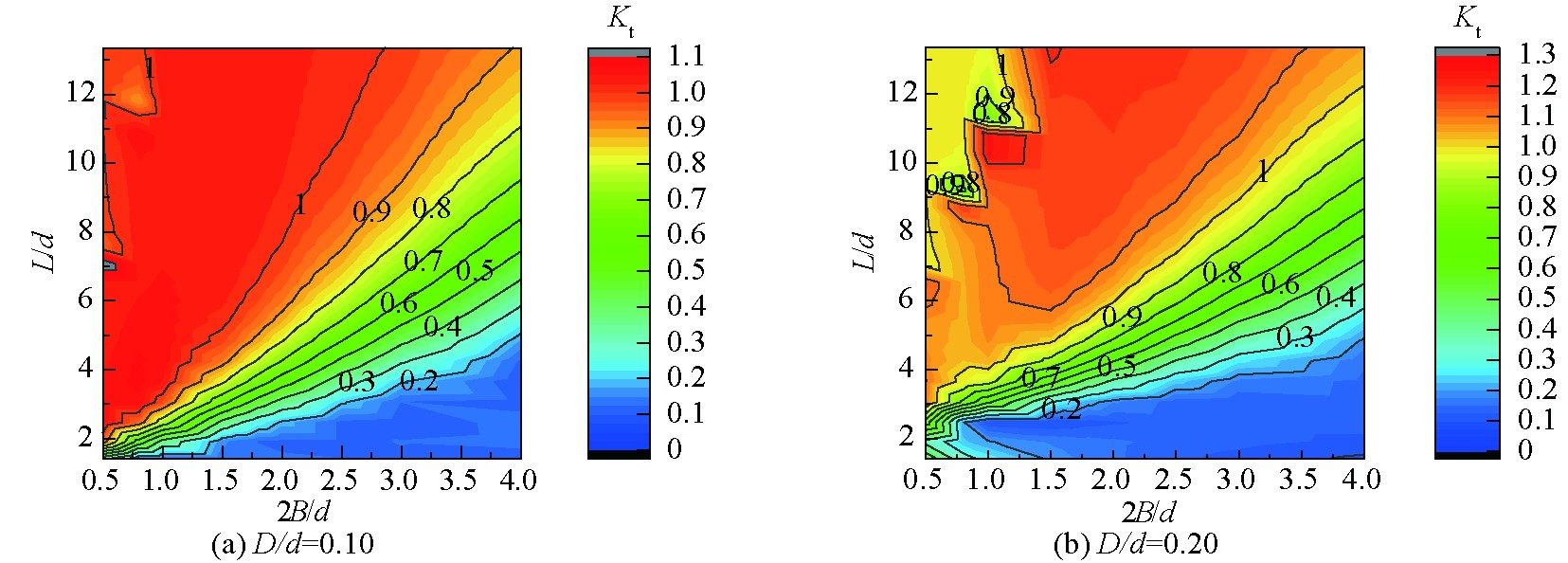
The wave attenuation performance of a floating breakwater is important in engineering applications. On the basis of potential flow theory, the analytical and simplified solutions of the transmission coefficient of a floating breakwater are deduced via velocity potential decompositions and eigenfunction expansions. The effects of the floating breakwater configuration, working sea state and motion response on the wave attenuation performance are described, facilitating a deeper investigation into the wave attenuation mechanism of the breakwater. The results indicate that the width and draft of the breakwater, incident wavelength, and motion response significantly affect the transmission coefficient of the breakwater. The wave passability rate, α1 (α1 = 0.5?2B/L), is defined to qualitatively explain why long-period waves are difficult to control and attenuate. The radiation effect caused by the motion of the floating breakwater on the transmission coefficient is relatively complex, and the wave attenuation efficiency of the breakwater can be improved by optimizing the motion response. The incident wavelength and breakwater width are selected as the control parameters, and transmission coefficient charts of the floating breakwater for two-dimensional conditions are drawn, providing technical guidance for the configuration selection and design of the floating breakwater.
The wave attenuation performance of a floating breakwater is important in engineering applications. On the basis of potential flow theory, the analytical and simplified solutions of the transmission coefficient of a floating breakwater are deduced via velocity potential decompositions and eigenfunction expansions. The effects of the floating breakwater configuration, working sea state and motion response on the wave attenuation performance are described, facilitating a deeper investigation into the wave attenuation mechanism of the breakwater. The results indicate that the width and draft of the breakwater, incident wavelength, and motion response significantly affect the transmission coefficient of the breakwater. The wave passability rate, α1 (α1 = 0.5?2B/L), is defined to qualitatively explain why long-period waves are difficult to control and attenuate. The radiation effect caused by the motion of the floating breakwater on the transmission coefficient is relatively complex, and the wave attenuation efficiency of the breakwater can be improved by optimizing the motion response. The incident wavelength and breakwater width are selected as the control parameters, and transmission coefficient charts of the floating breakwater for two-dimensional conditions are drawn, providing technical guidance for the configuration selection and design of the floating breakwater.
2025, 39(2)
:256-267.
doi: 10.1007/s13344-025-0018-5
Abstract:
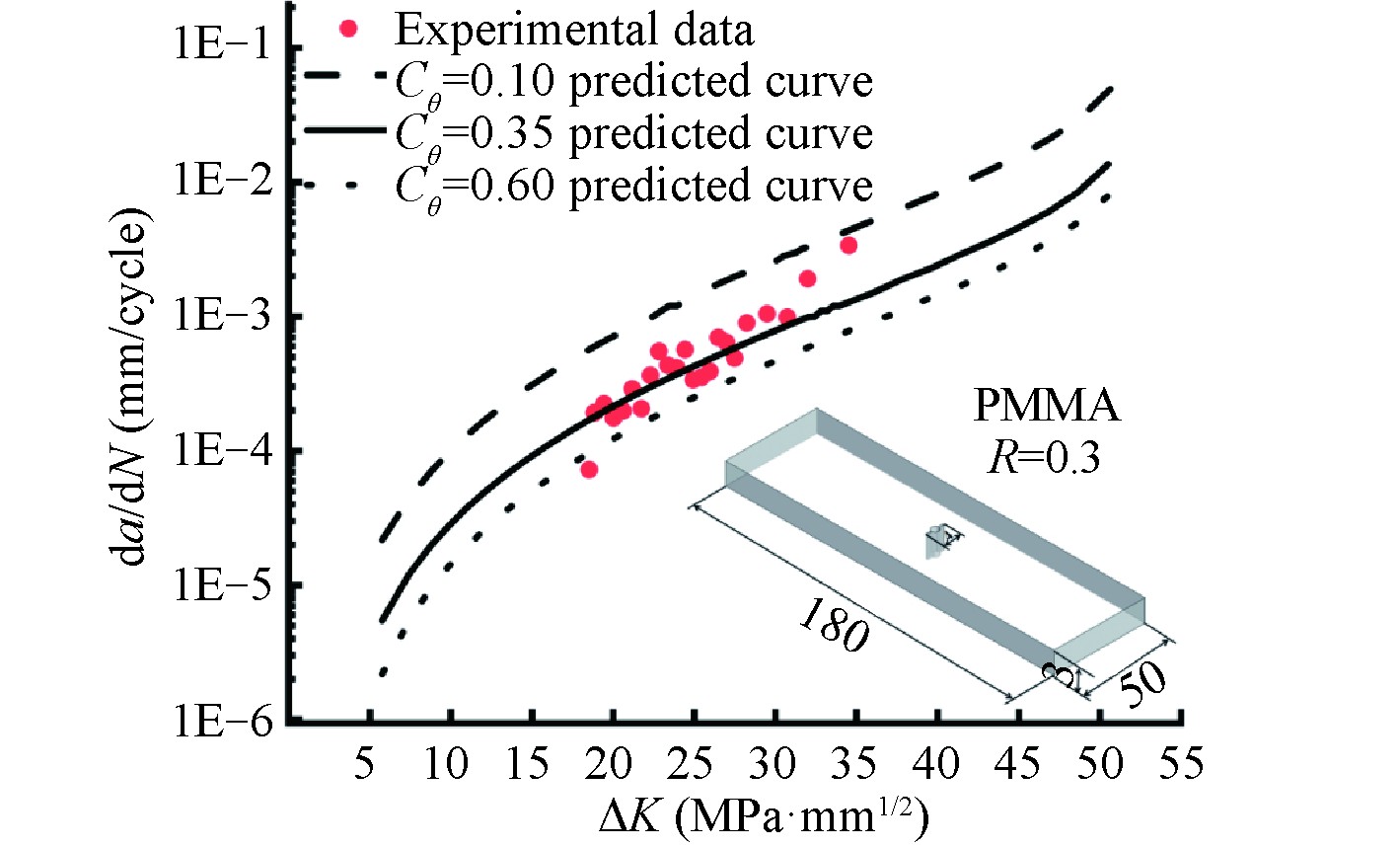
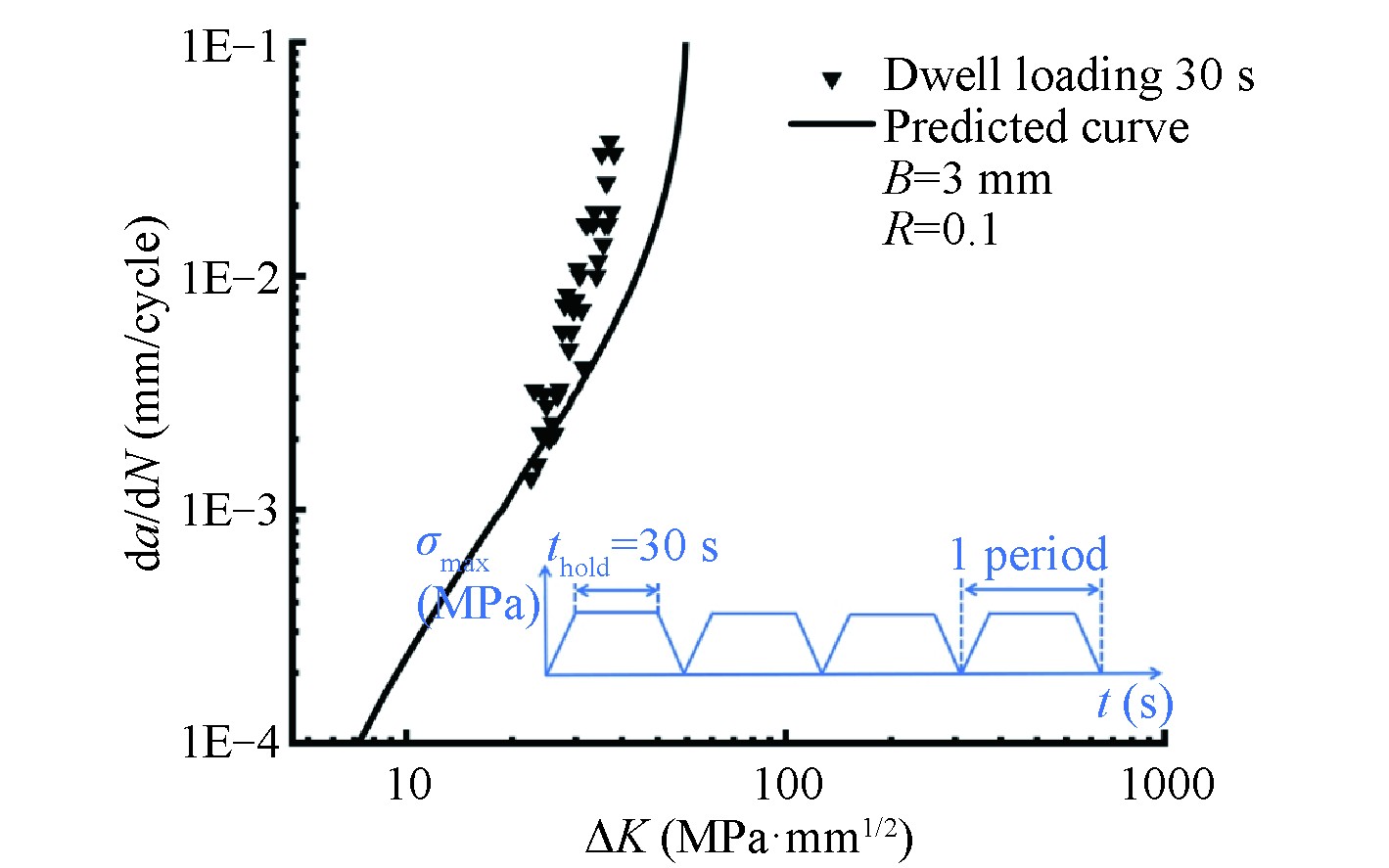
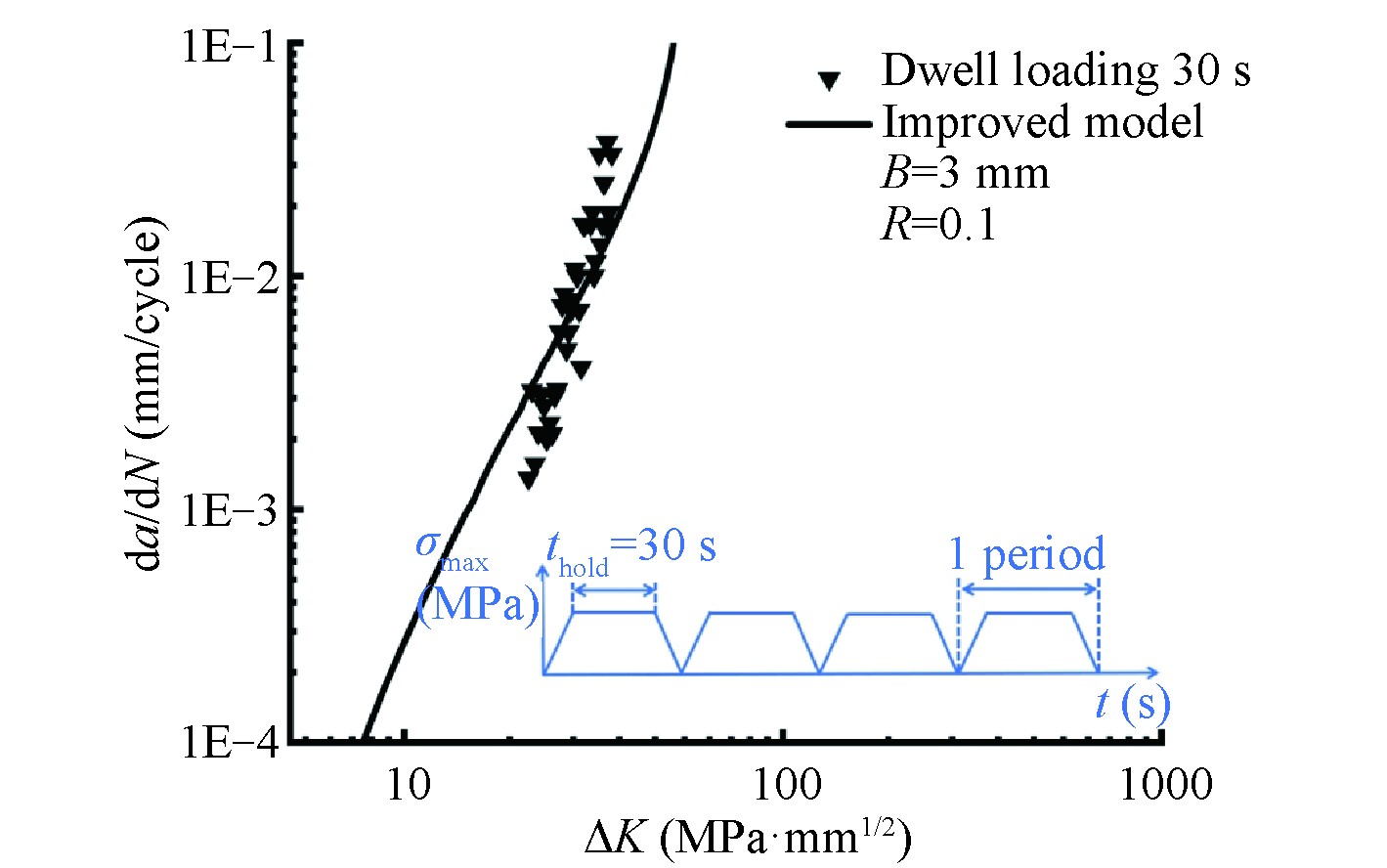
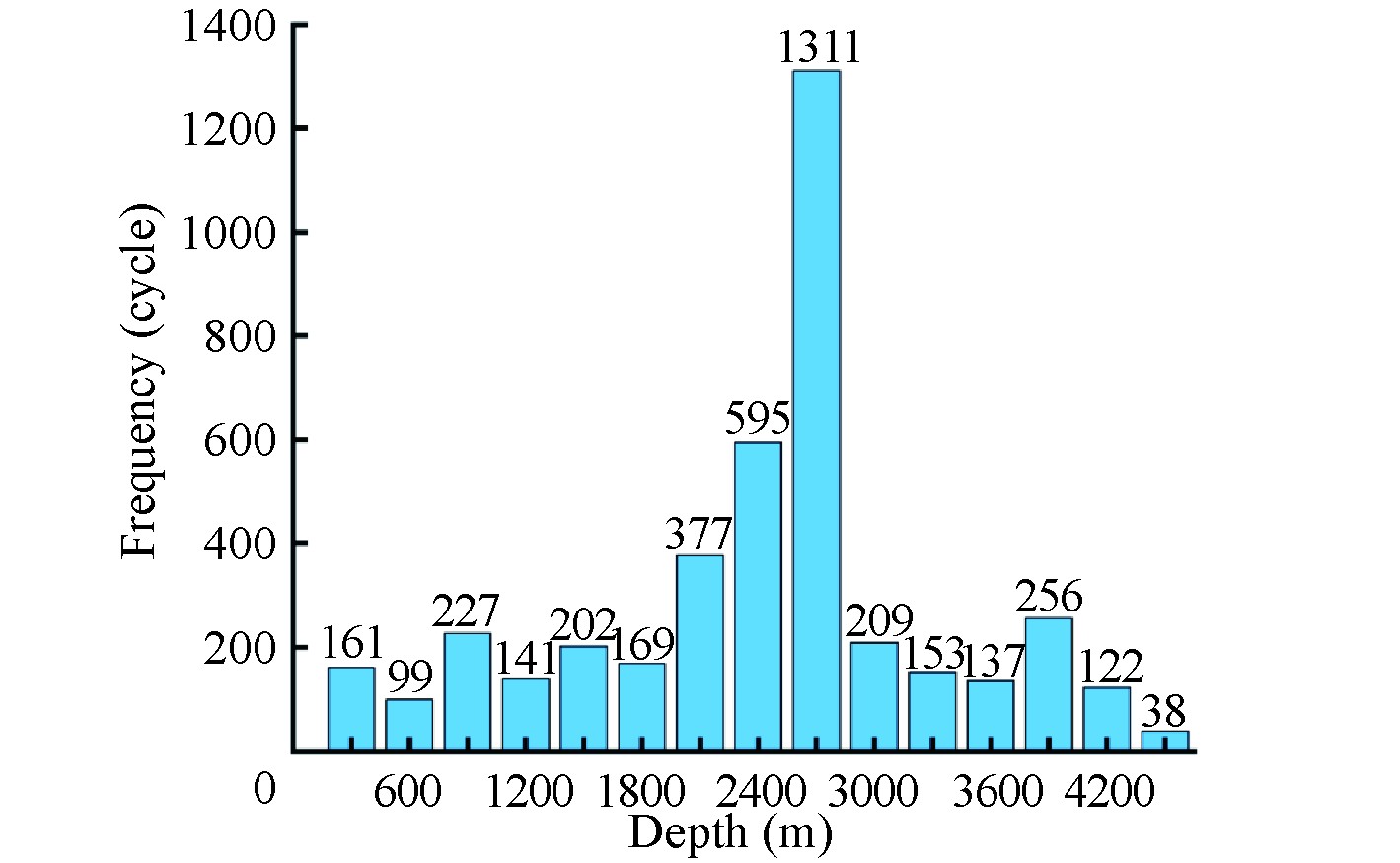
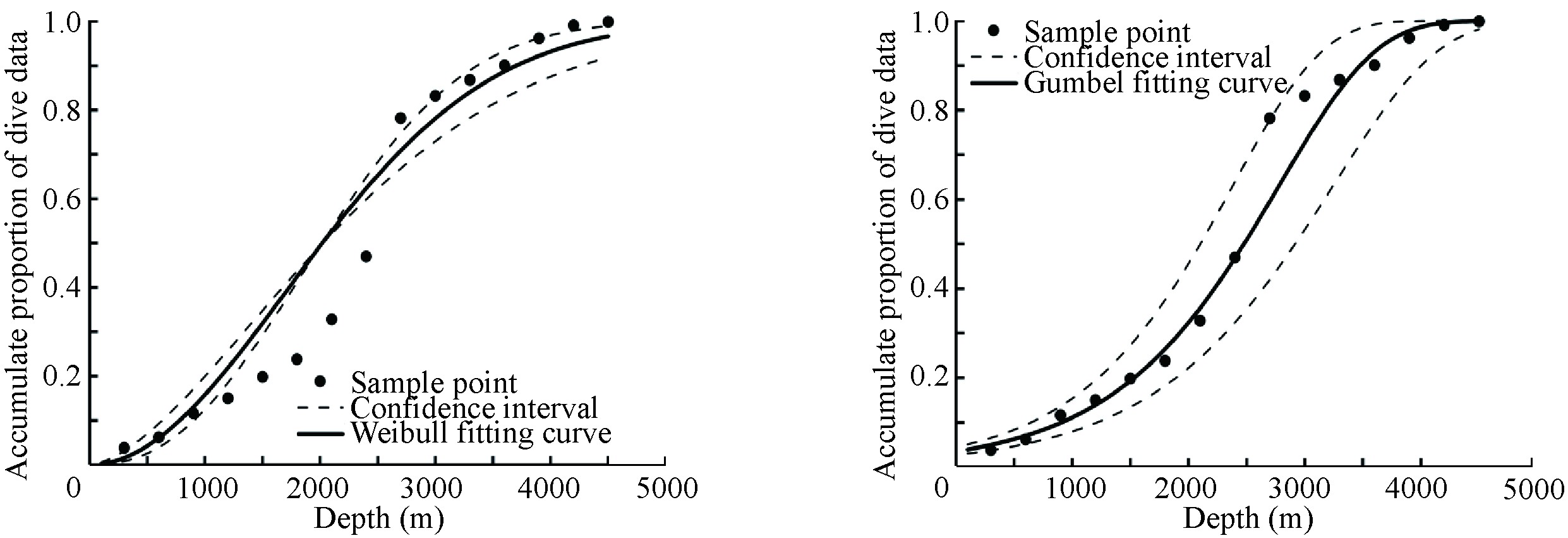
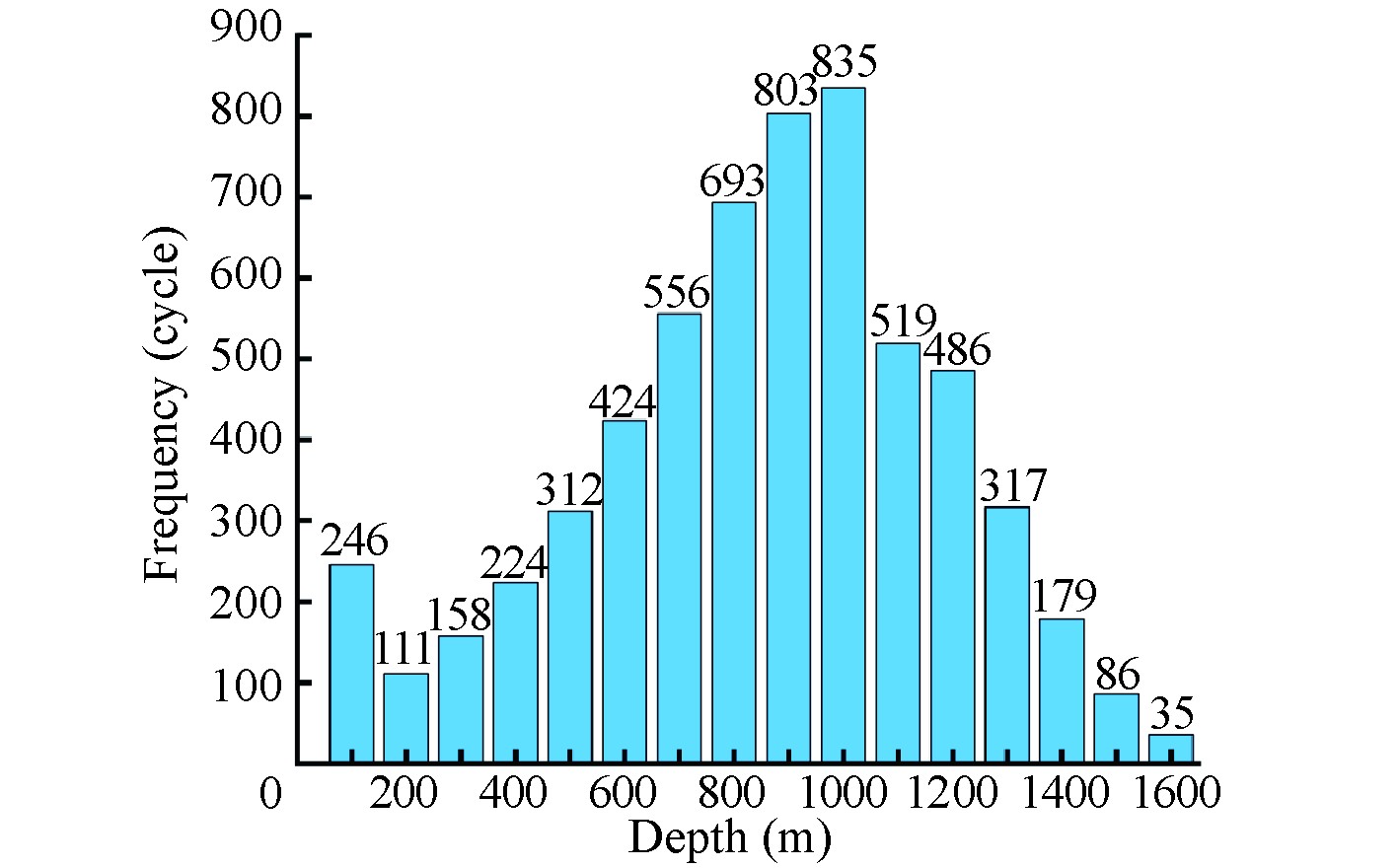
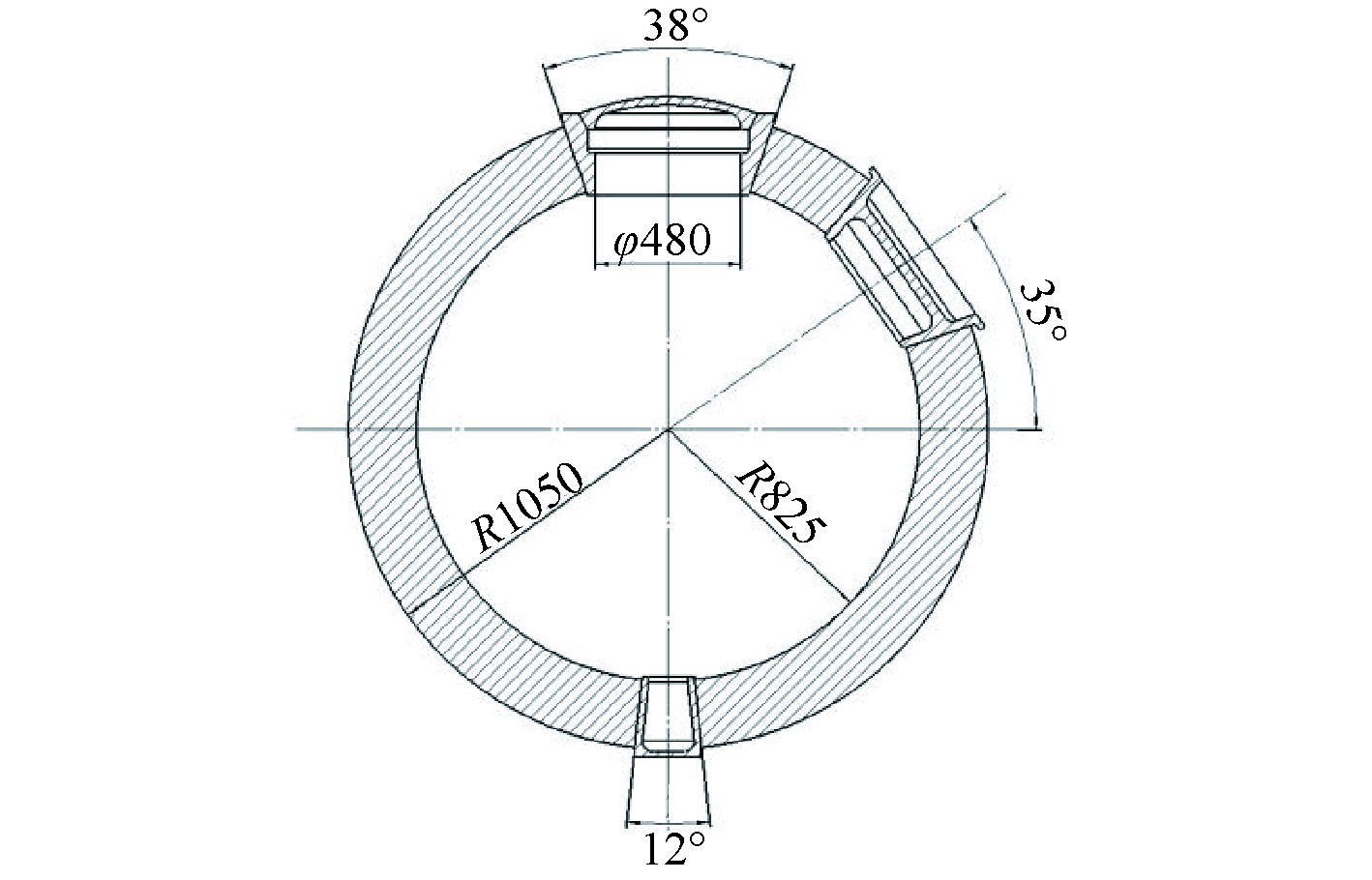
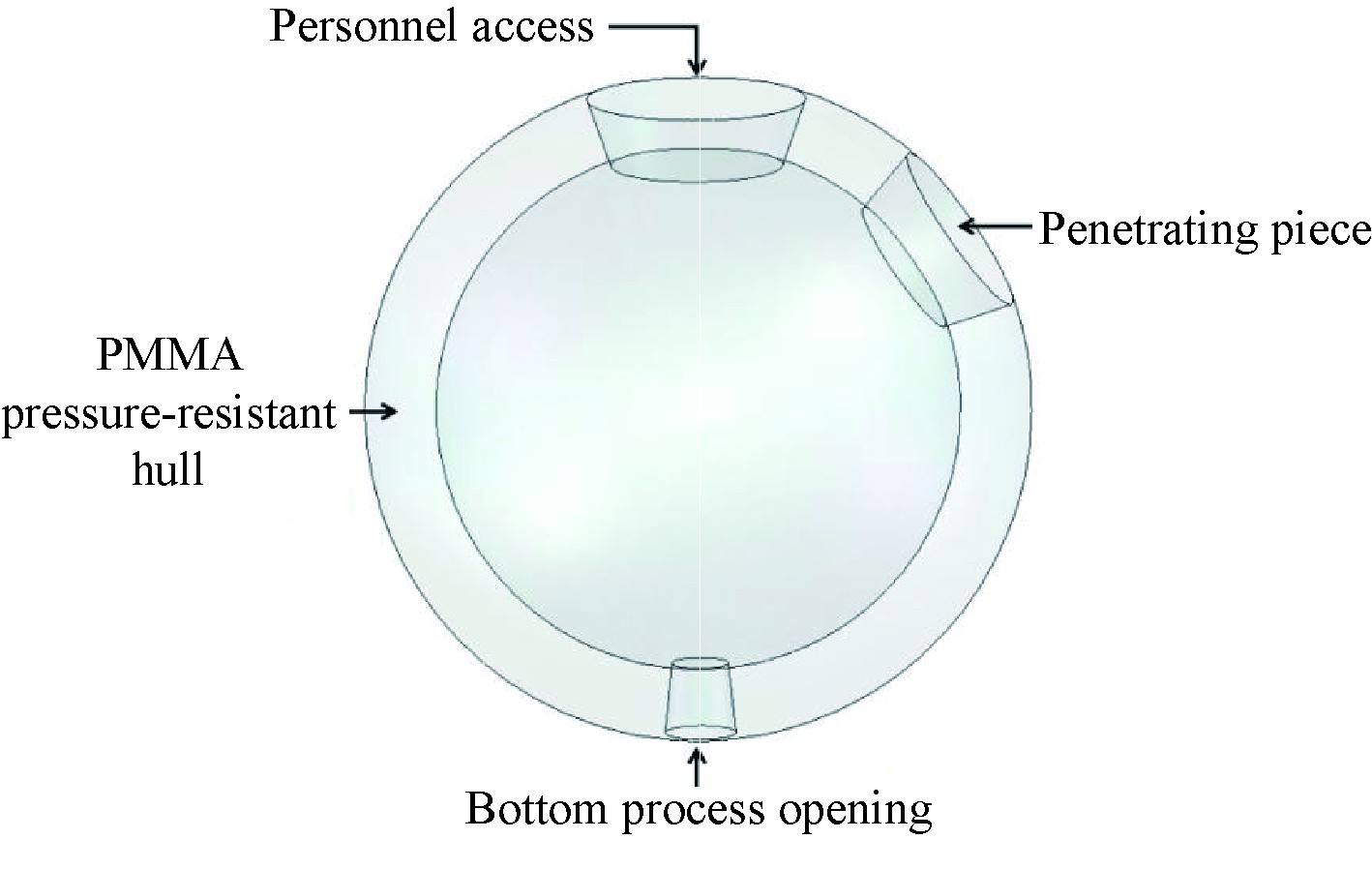
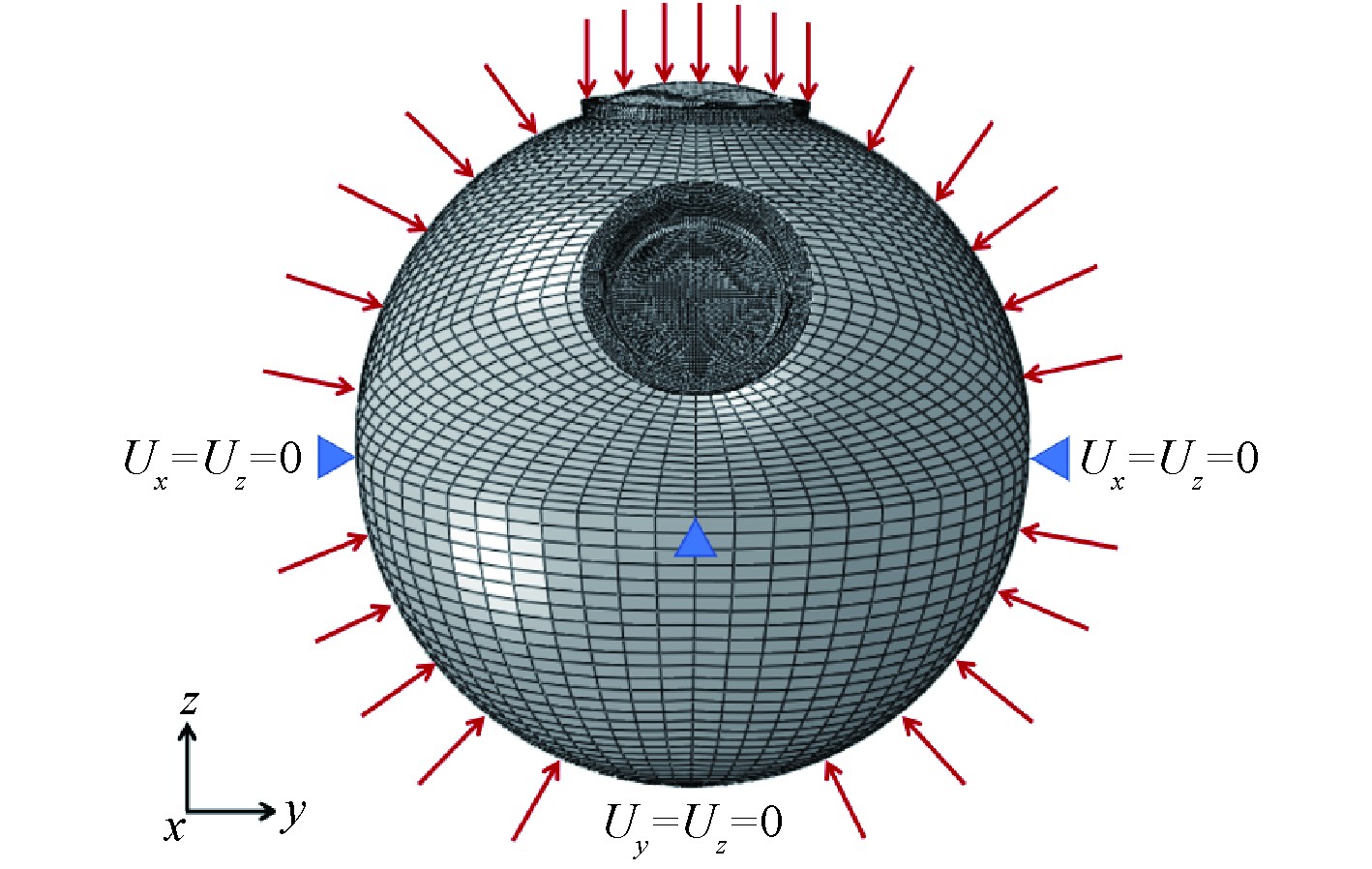
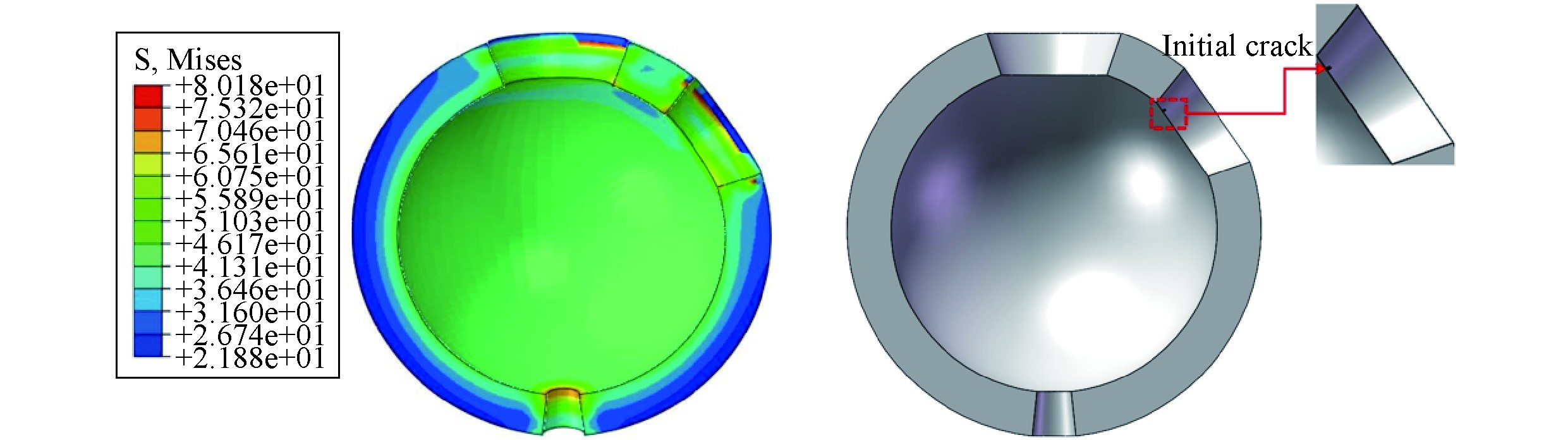
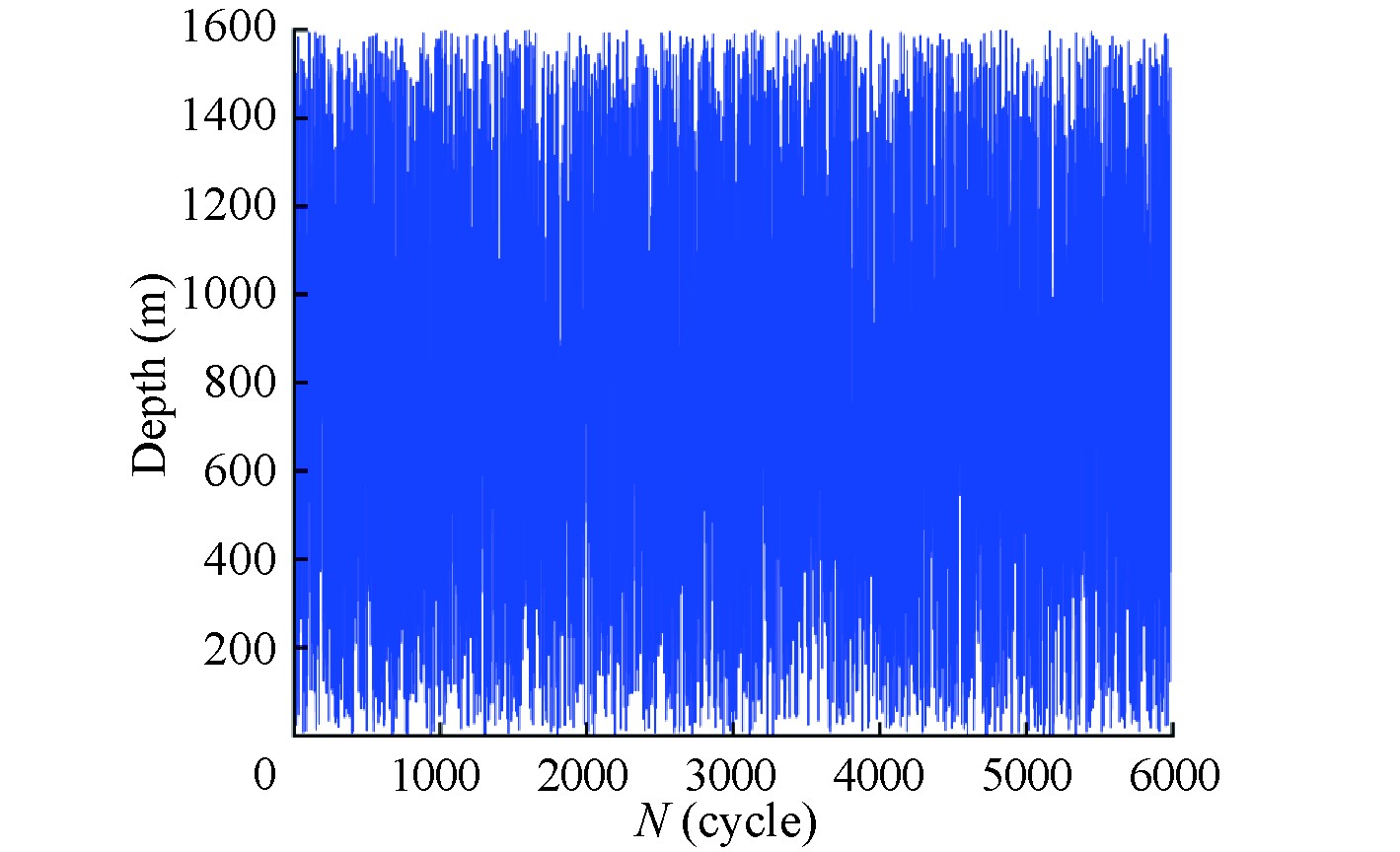
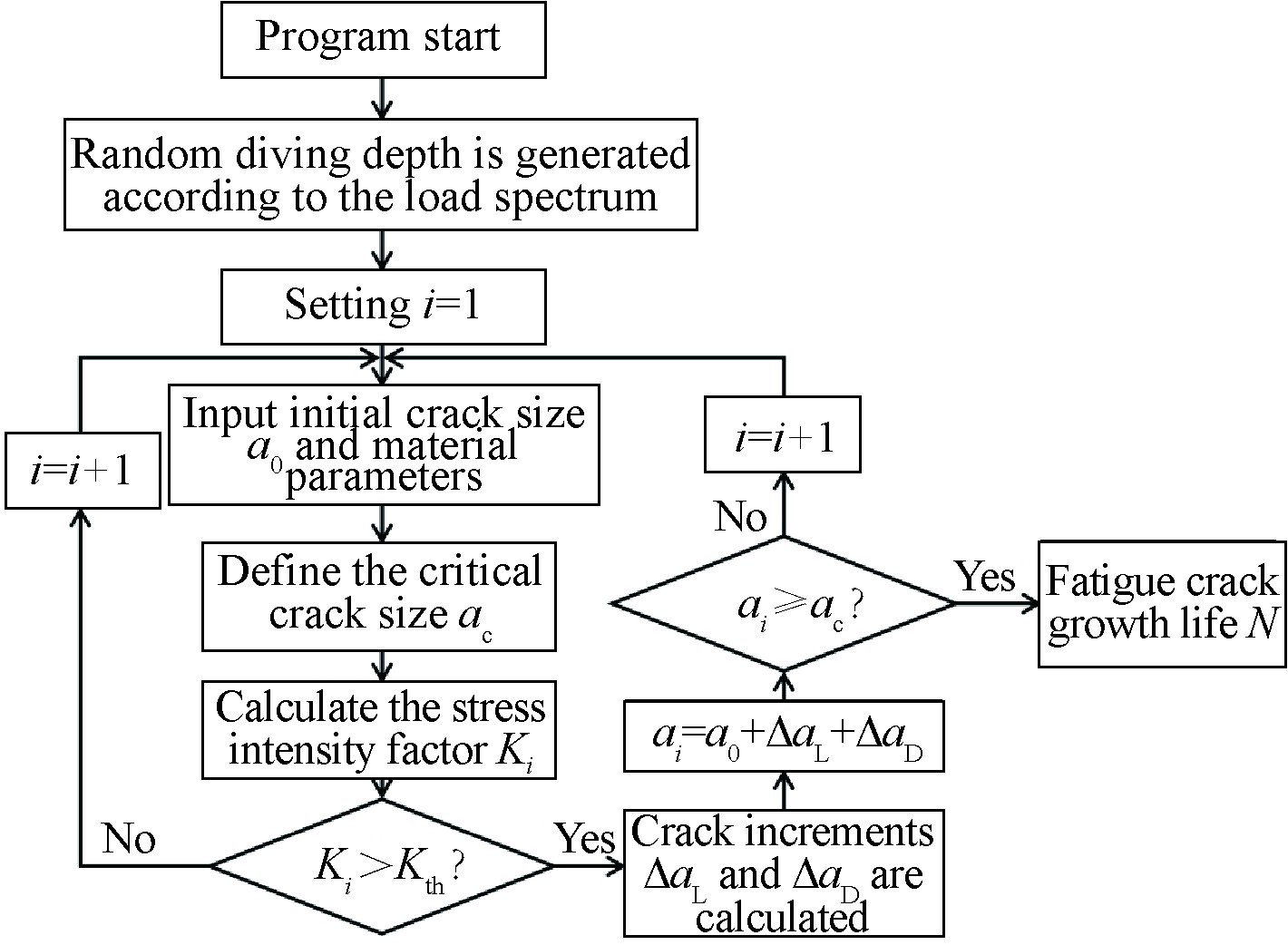
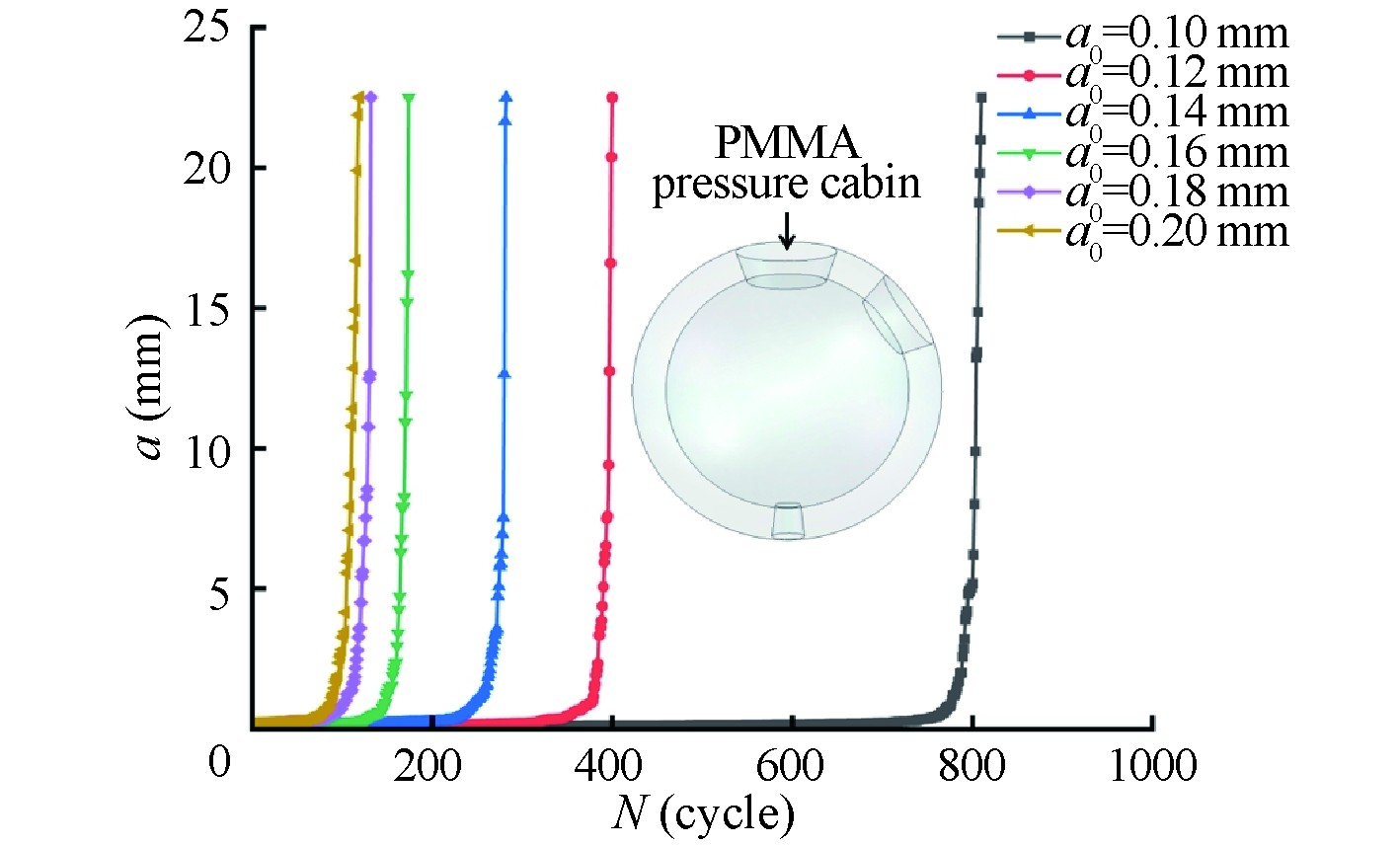
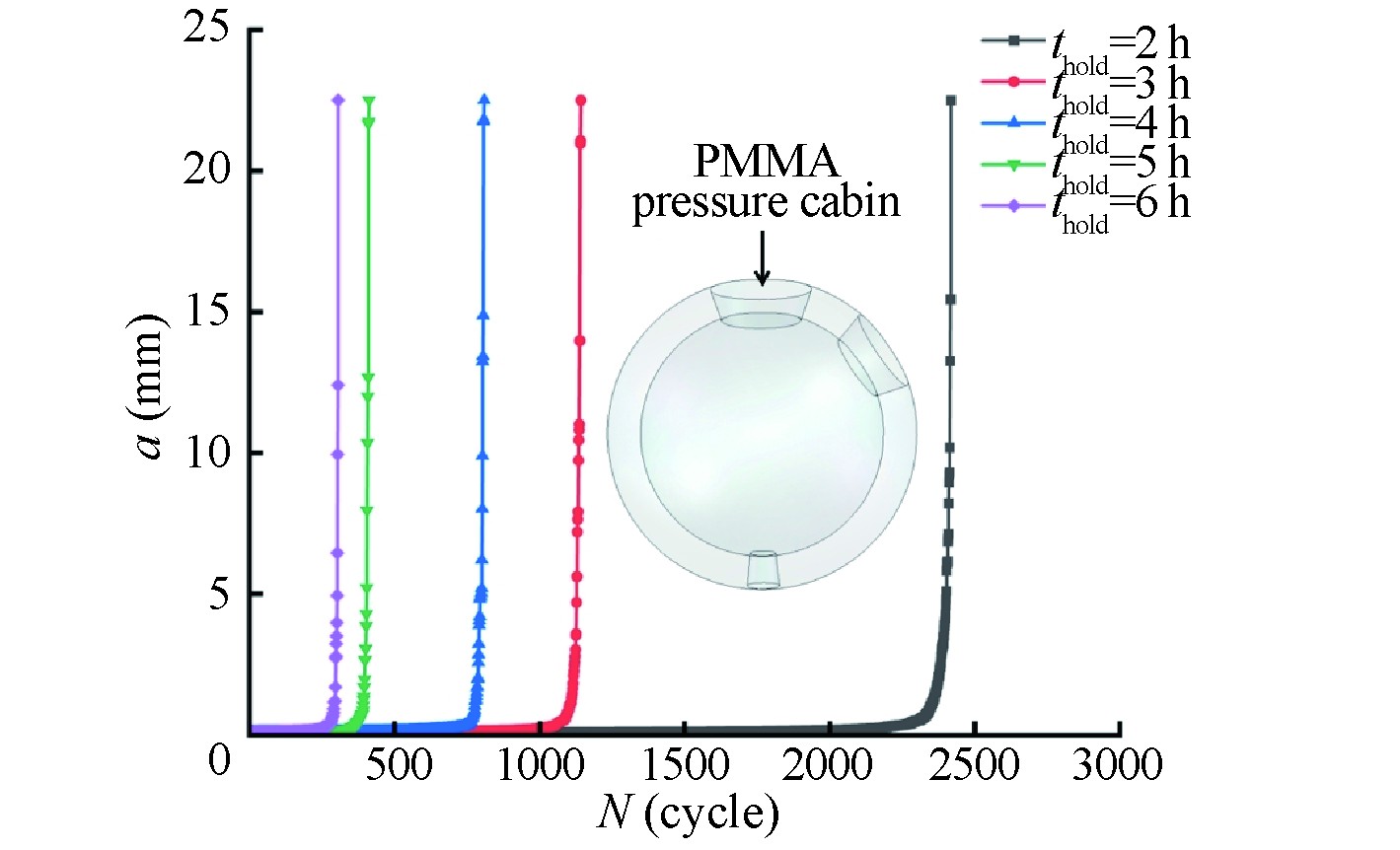
Polymethyl methacrylate (PMMA) has the advantages of good transparency, corrosion resistance and light weight and can be used as the preferred material for pressure-resistant cabins of fully transparent submersibles. In this study, based on the fracture mechanics method, a calculation method for estimating the residual fatigue life of a PMMA manned cabin is proposed by improving the small-time scale fatigue crack growth rate model. This improved model is verified by the experimental data of the PMMA material. Then, through the Weibull and Gumbel combined distribution functions, the fatigue load spectrum suitable for the fully transparent manned cabin is fitted according to the dive data. A parametric analysis of the residual fatigue life of the fully transparent manned cabin under various initial crack sizes and dwell time is conducted, yielding valuable results. This study aims to increase the safety of fully transparent pressure-resistant cabins and offer insights for fatigue analysis of underwater structures utilizing PMMA materials.
Polymethyl methacrylate (PMMA) has the advantages of good transparency, corrosion resistance and light weight and can be used as the preferred material for pressure-resistant cabins of fully transparent submersibles. In this study, based on the fracture mechanics method, a calculation method for estimating the residual fatigue life of a PMMA manned cabin is proposed by improving the small-time scale fatigue crack growth rate model. This improved model is verified by the experimental data of the PMMA material. Then, through the Weibull and Gumbel combined distribution functions, the fatigue load spectrum suitable for the fully transparent manned cabin is fitted according to the dive data. A parametric analysis of the residual fatigue life of the fully transparent manned cabin under various initial crack sizes and dwell time is conducted, yielding valuable results. This study aims to increase the safety of fully transparent pressure-resistant cabins and offer insights for fatigue analysis of underwater structures utilizing PMMA materials.
2025, 39(2)
:268-279.
doi: 10.1007/s13344-025-0019-4
Abstract:
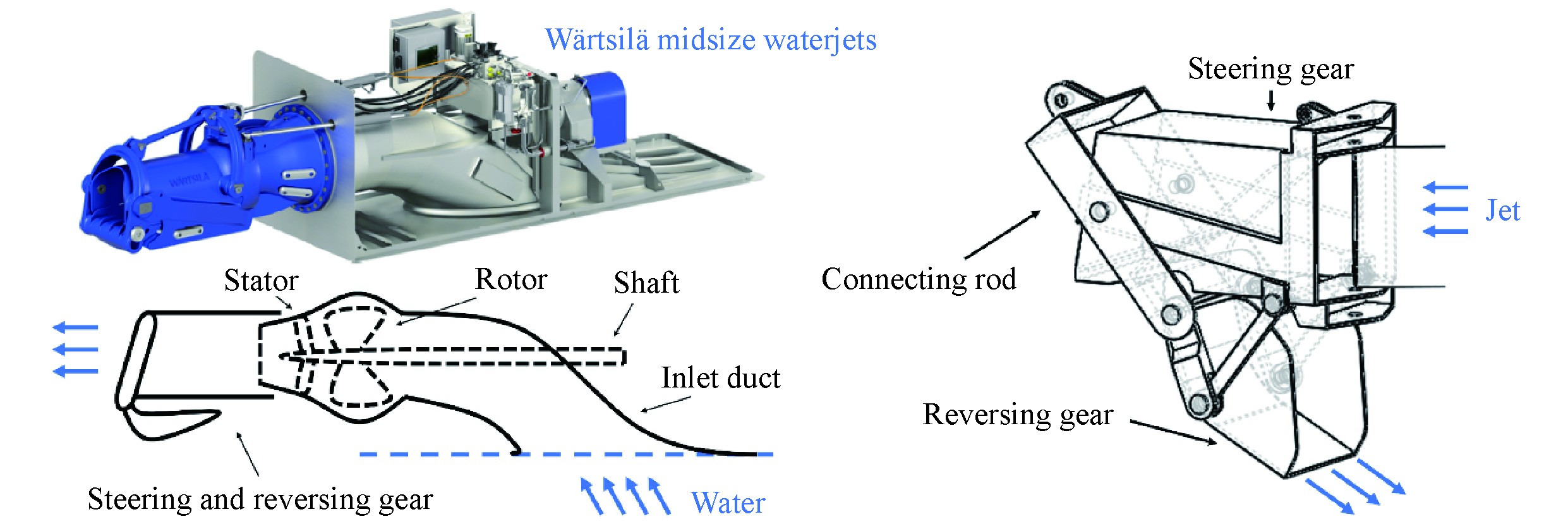
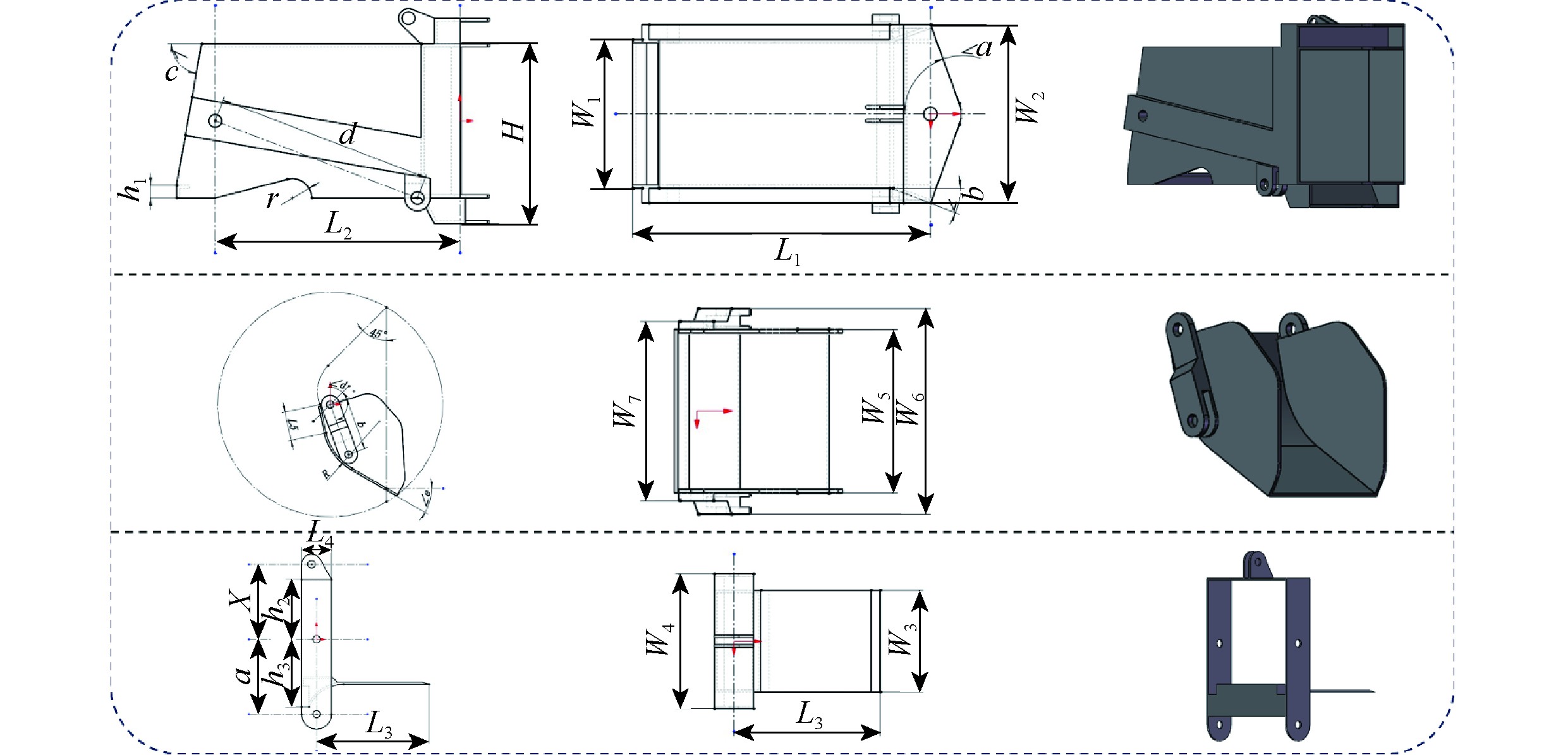
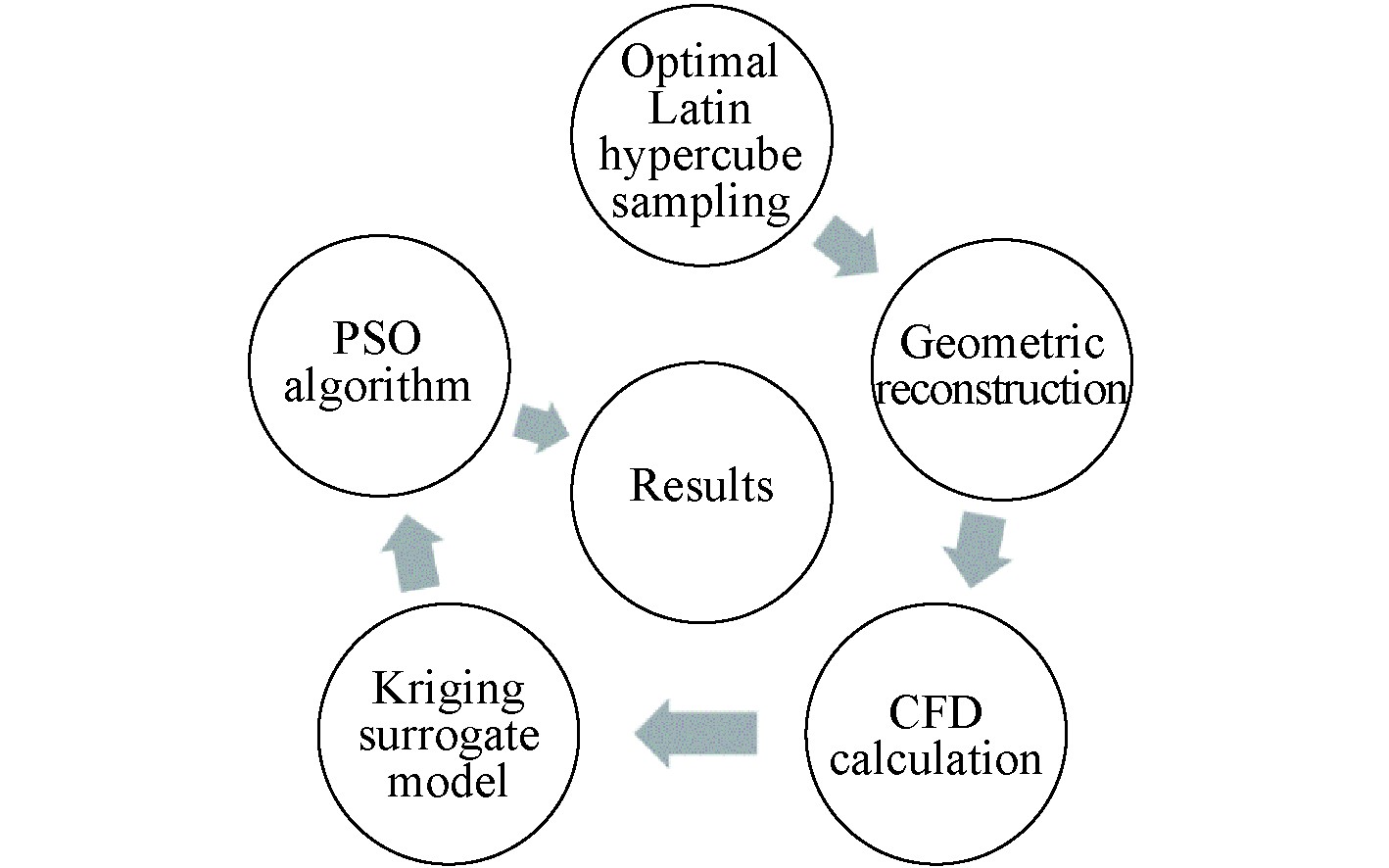
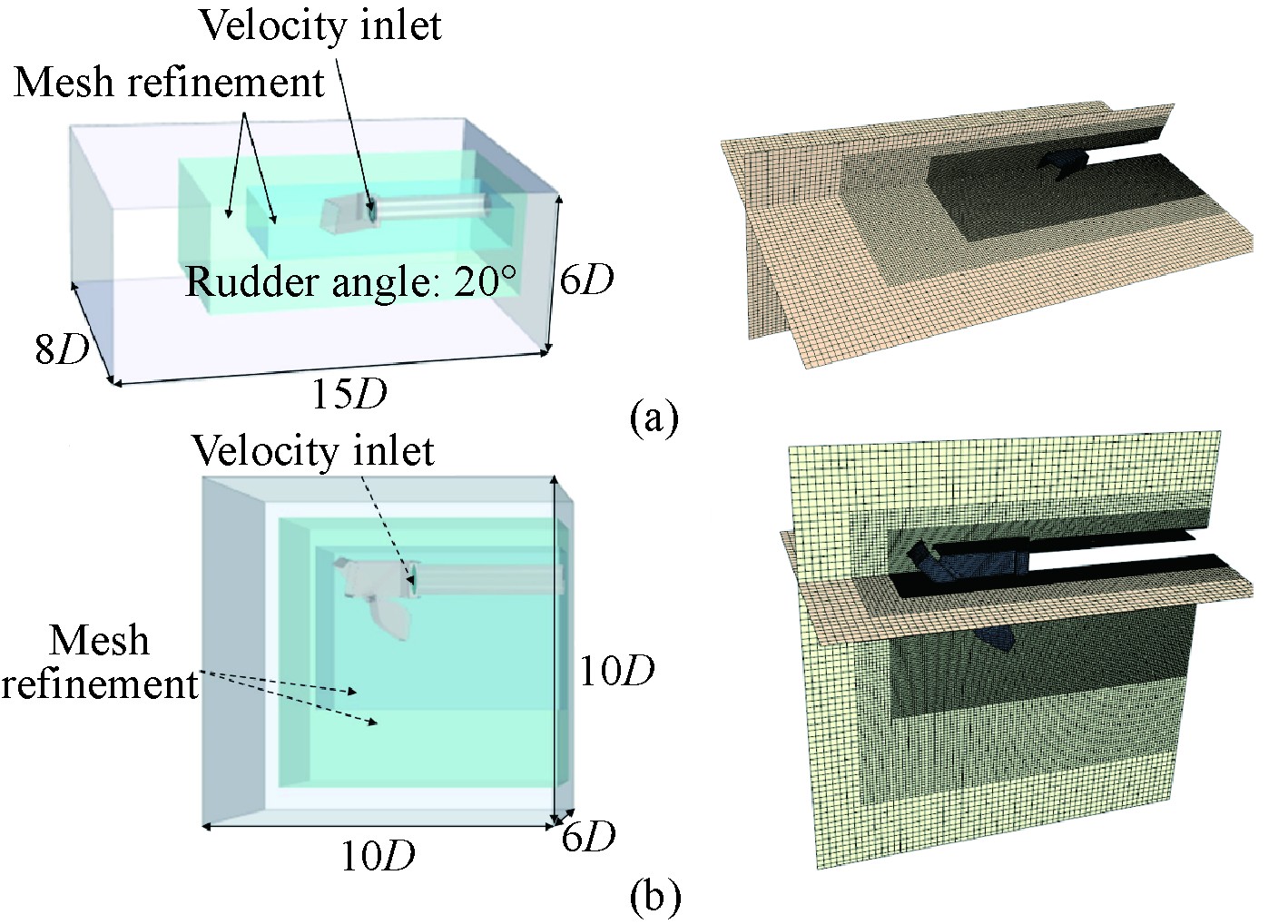
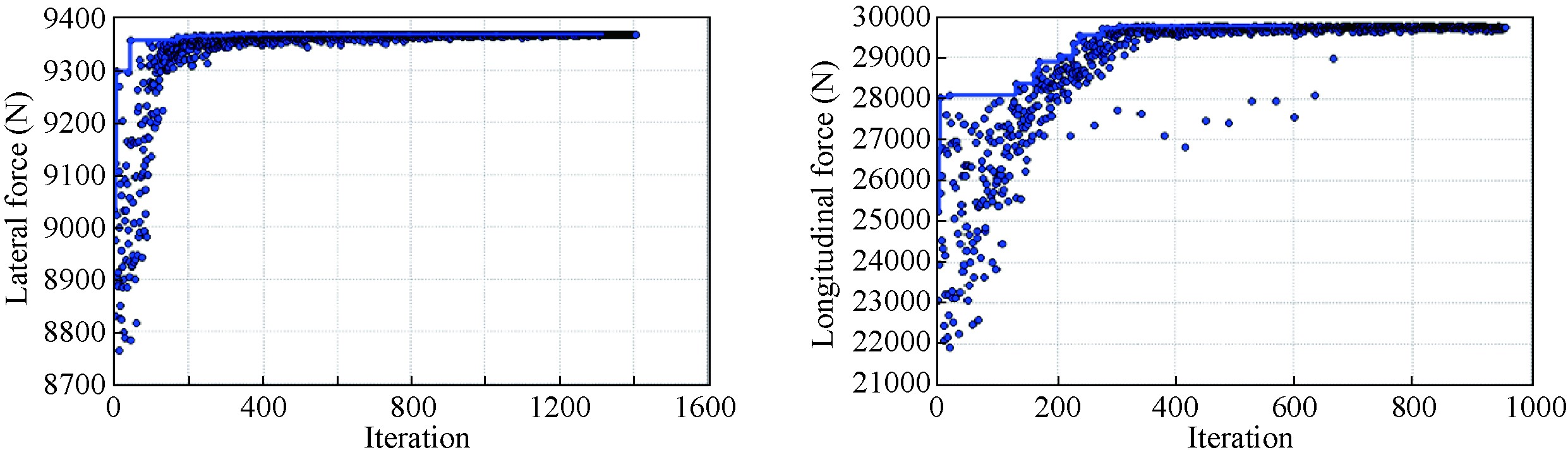
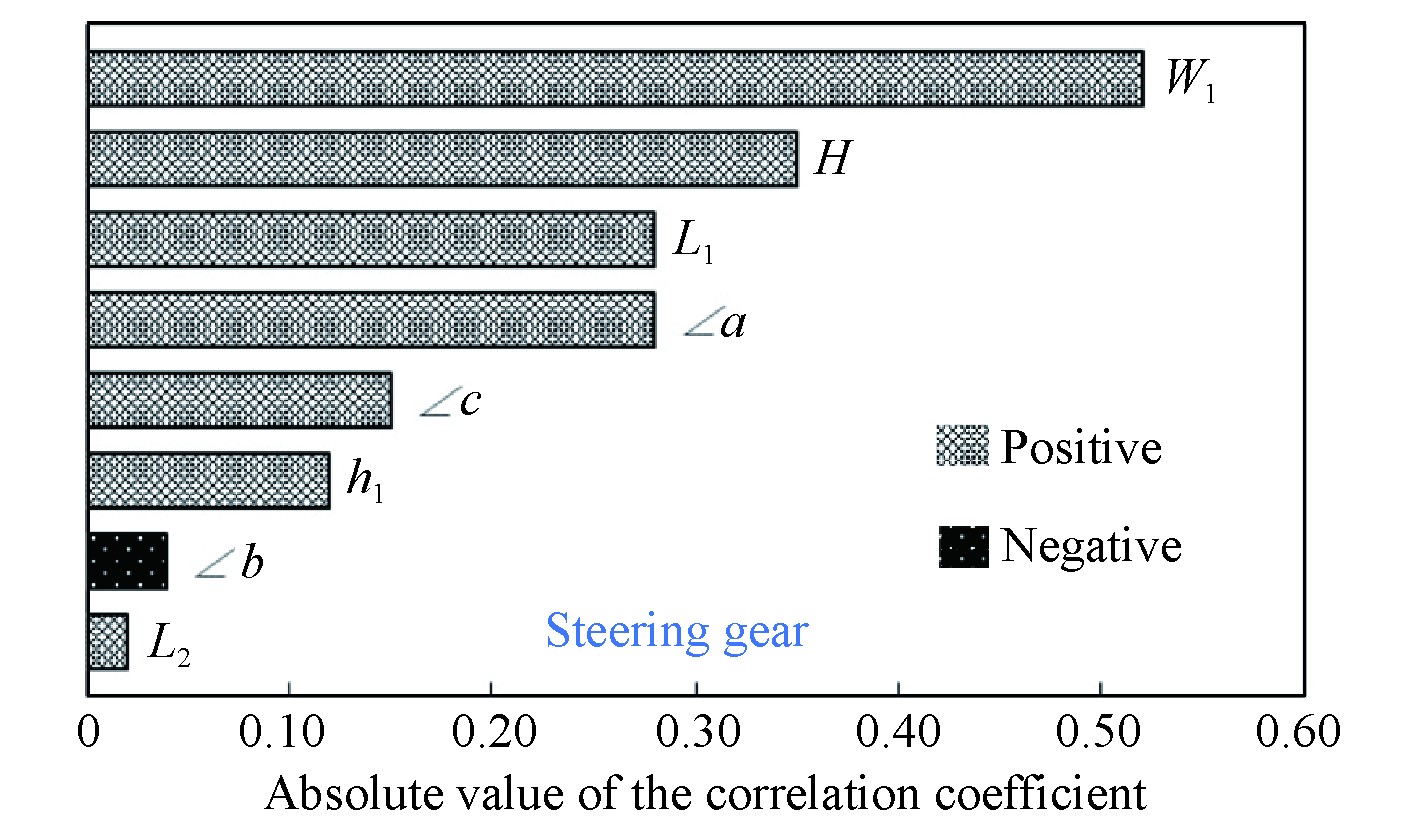
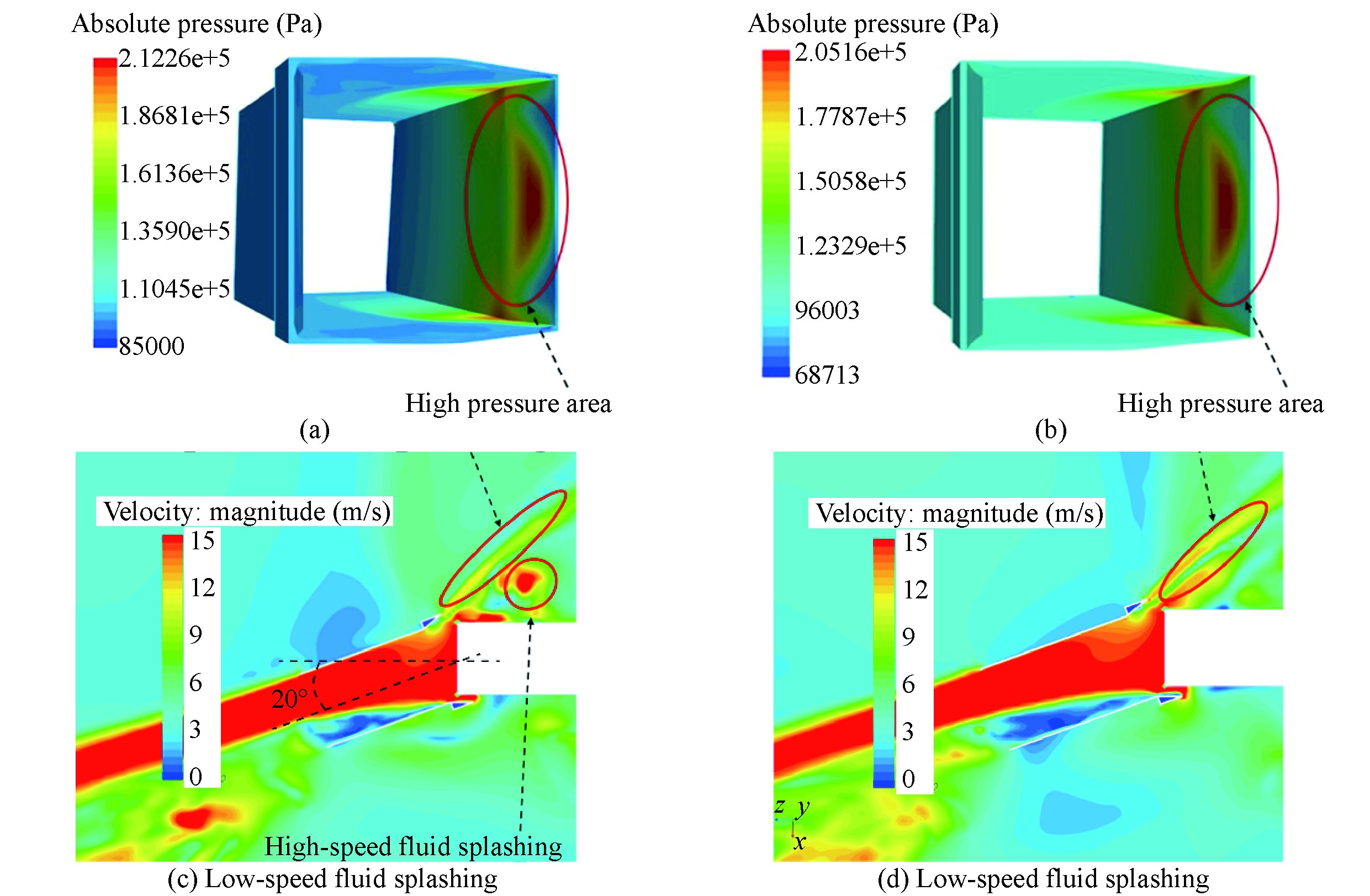
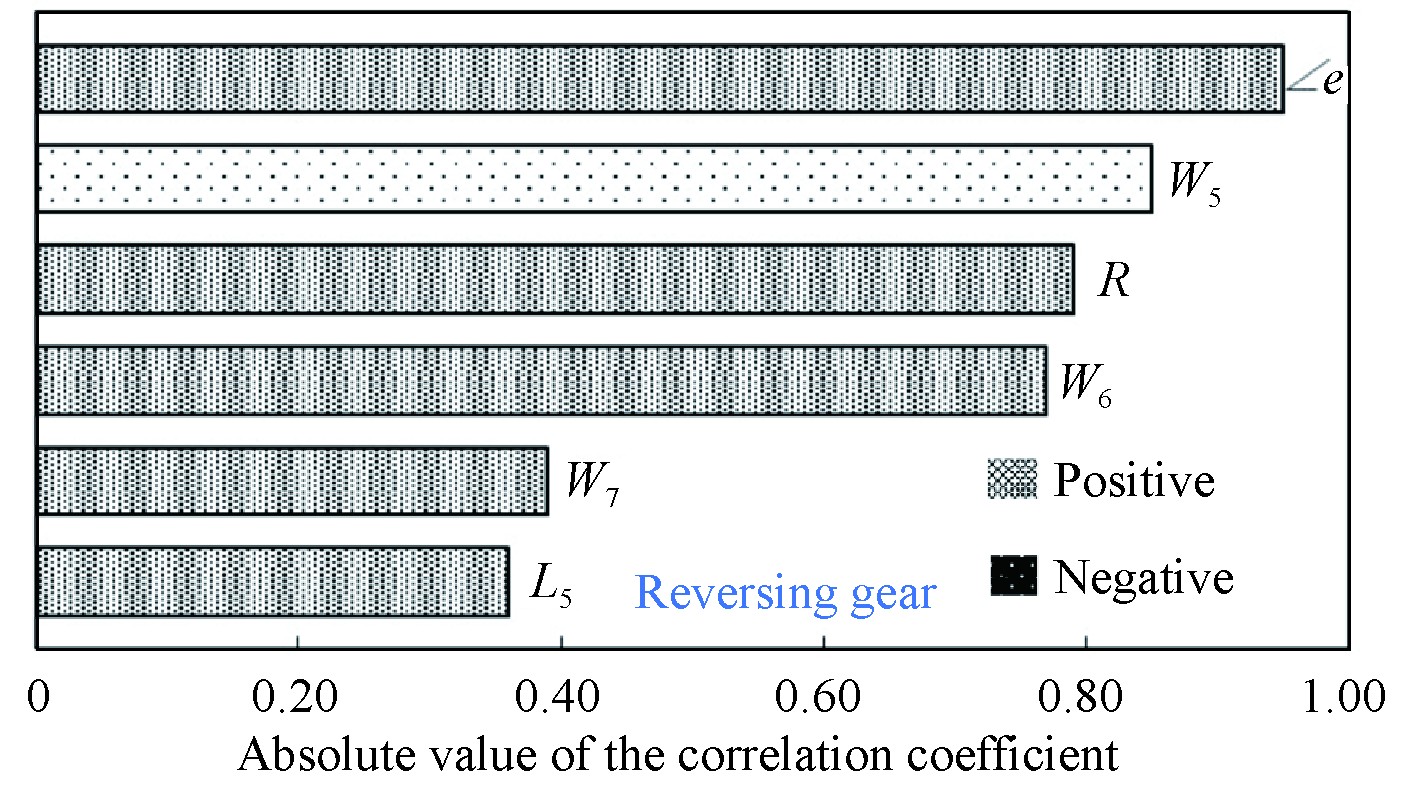
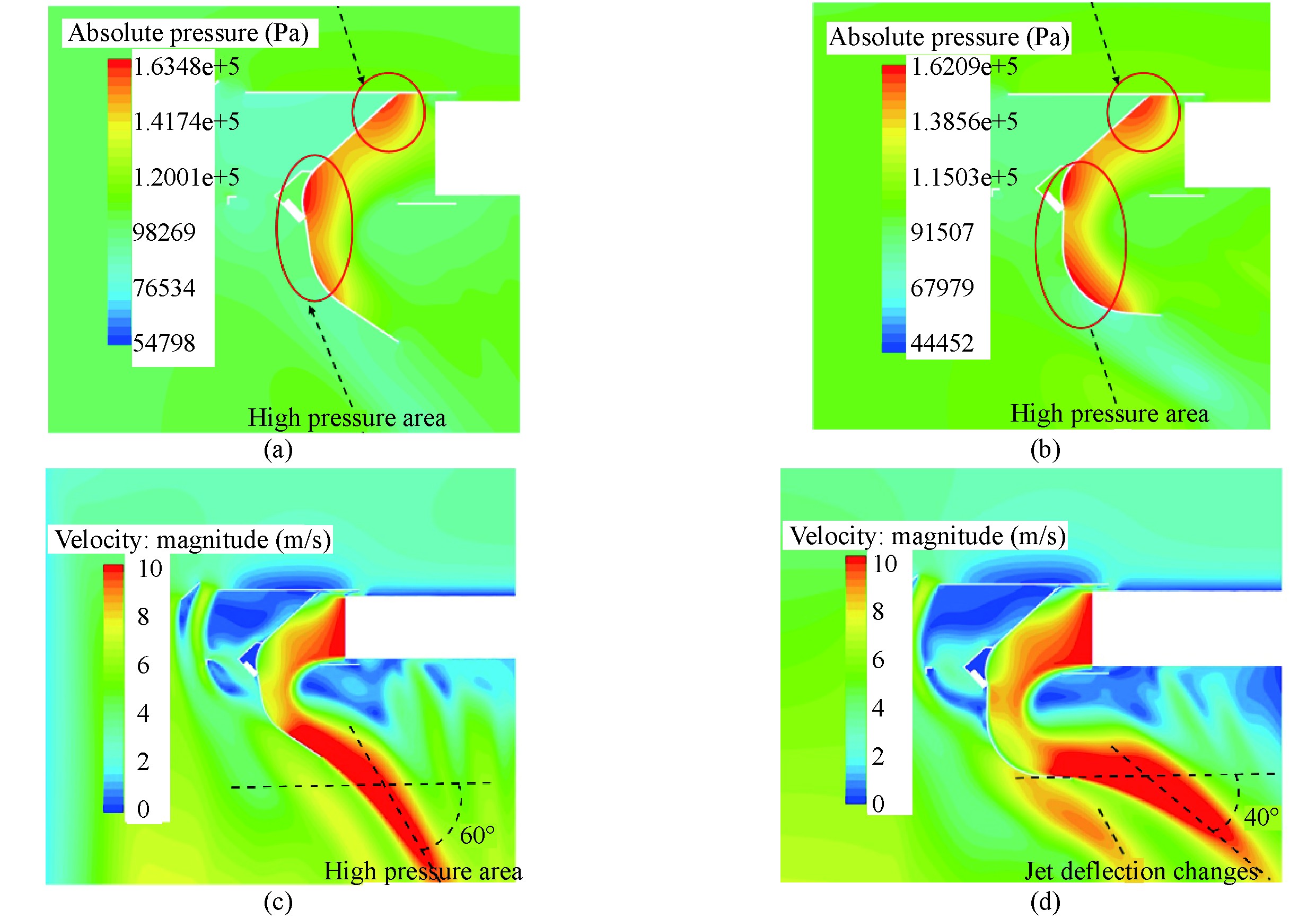
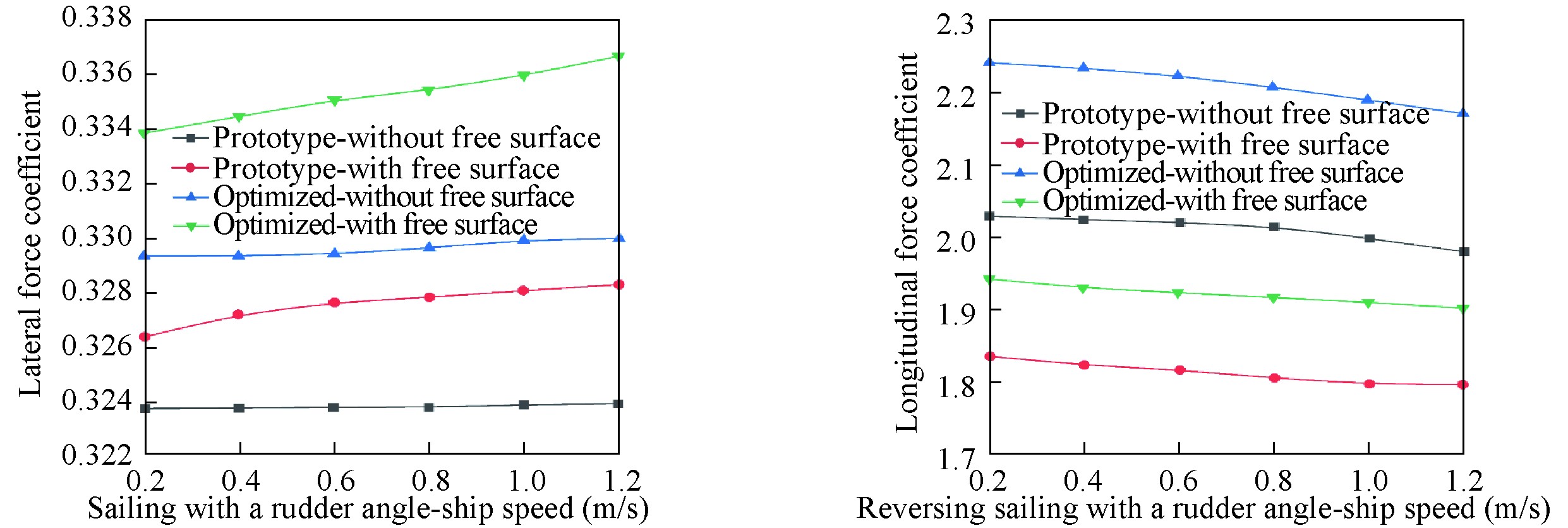
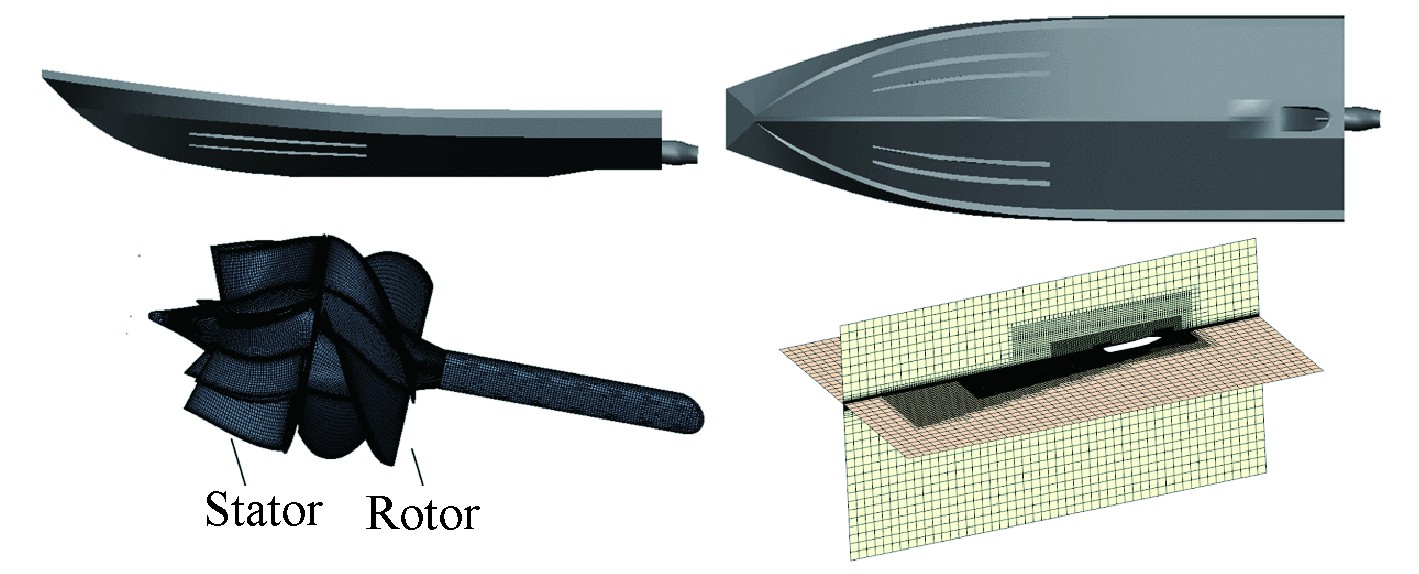
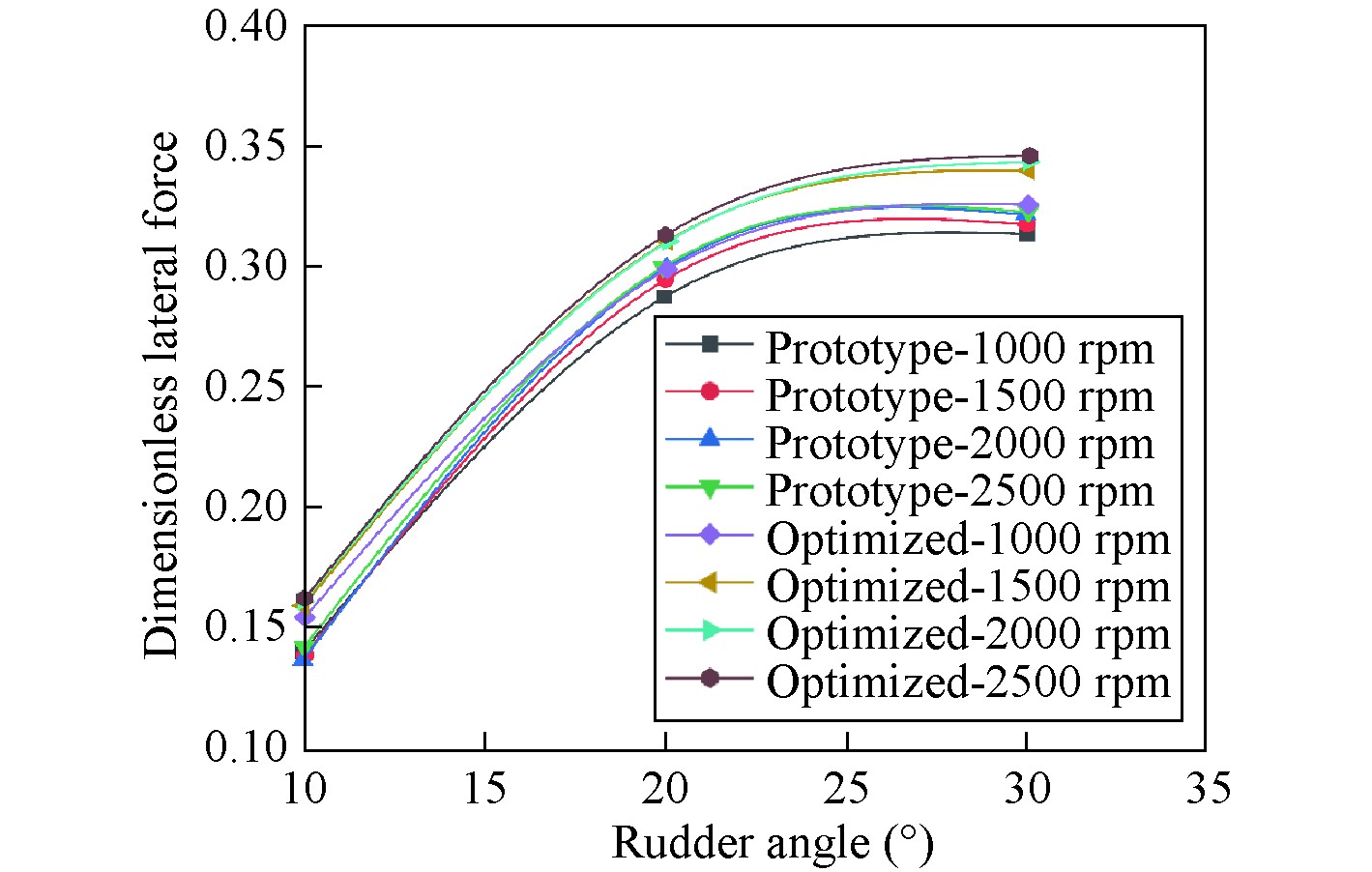
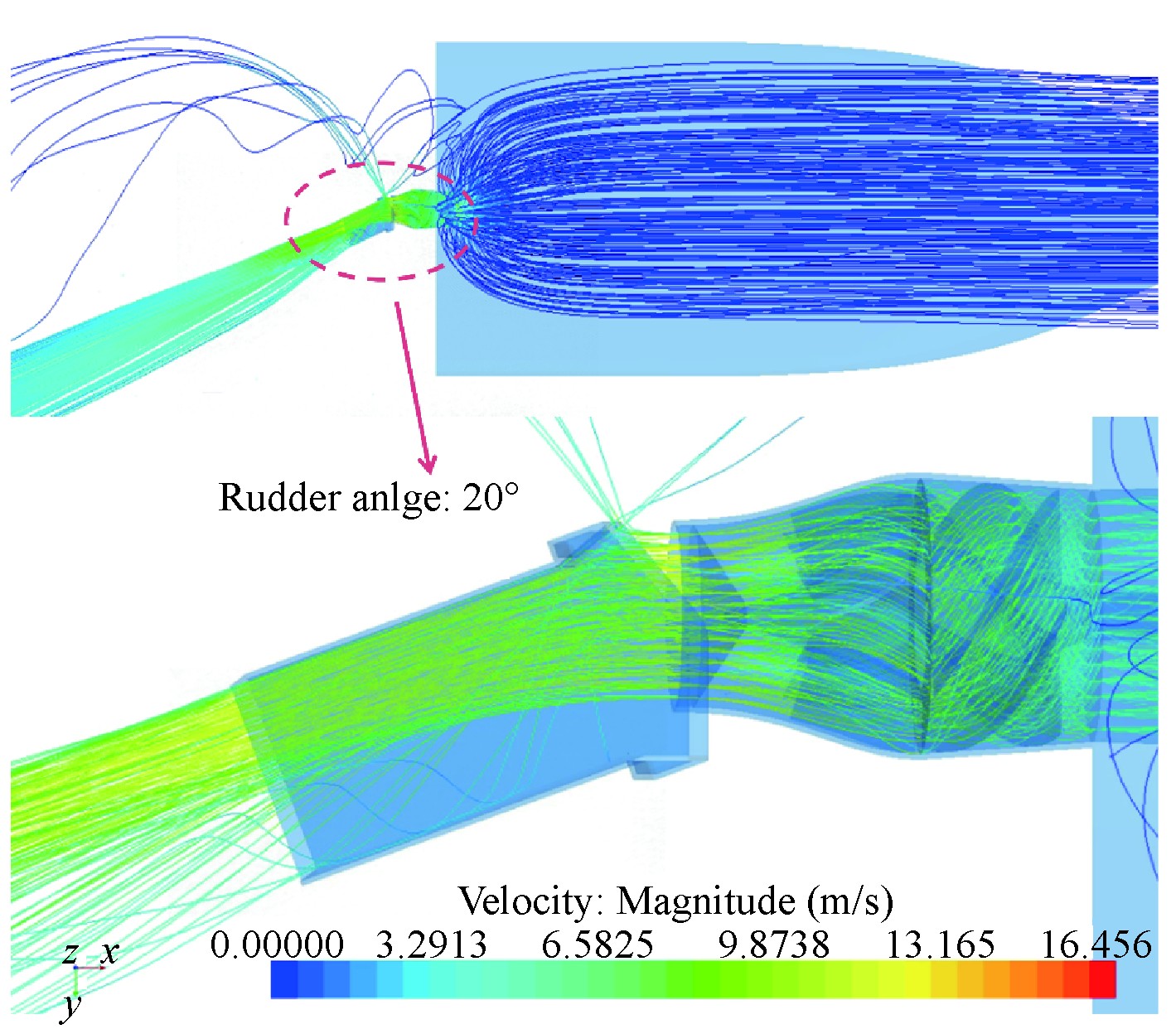
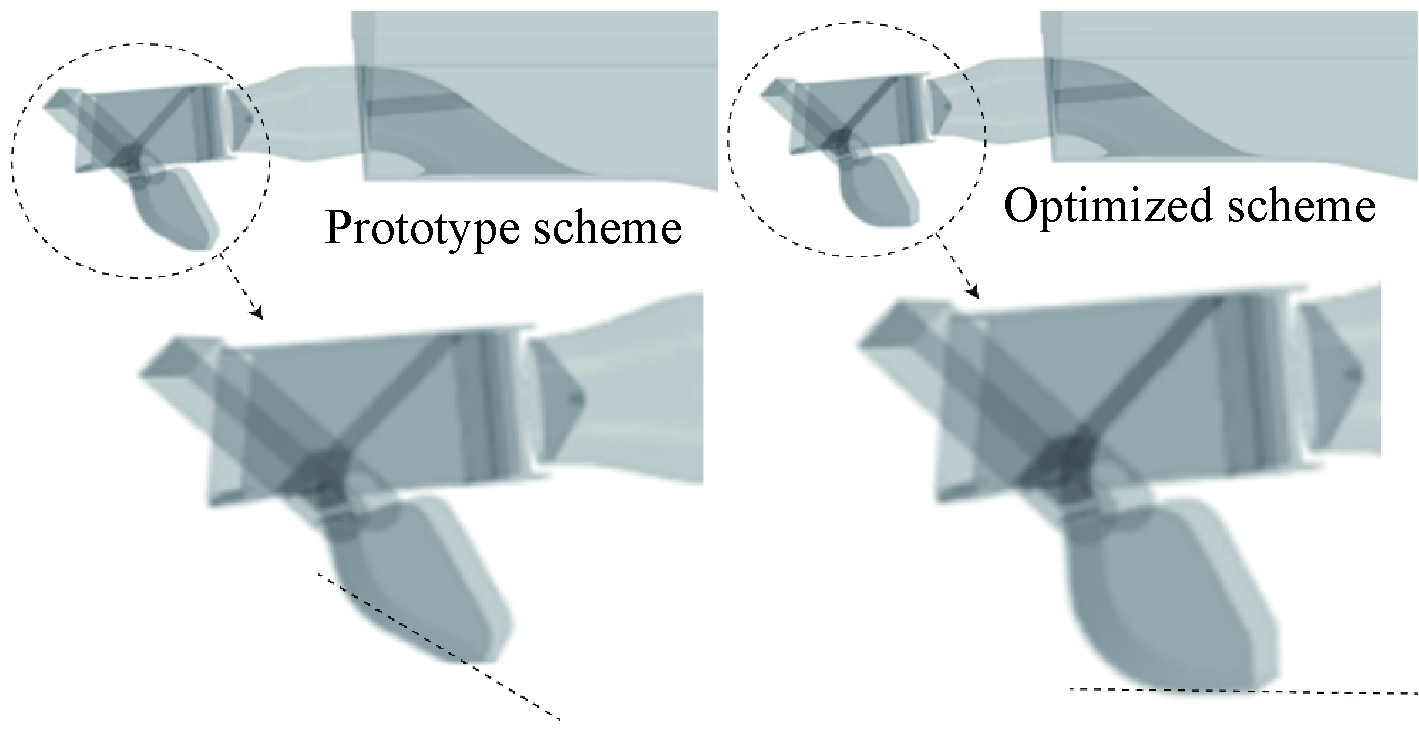
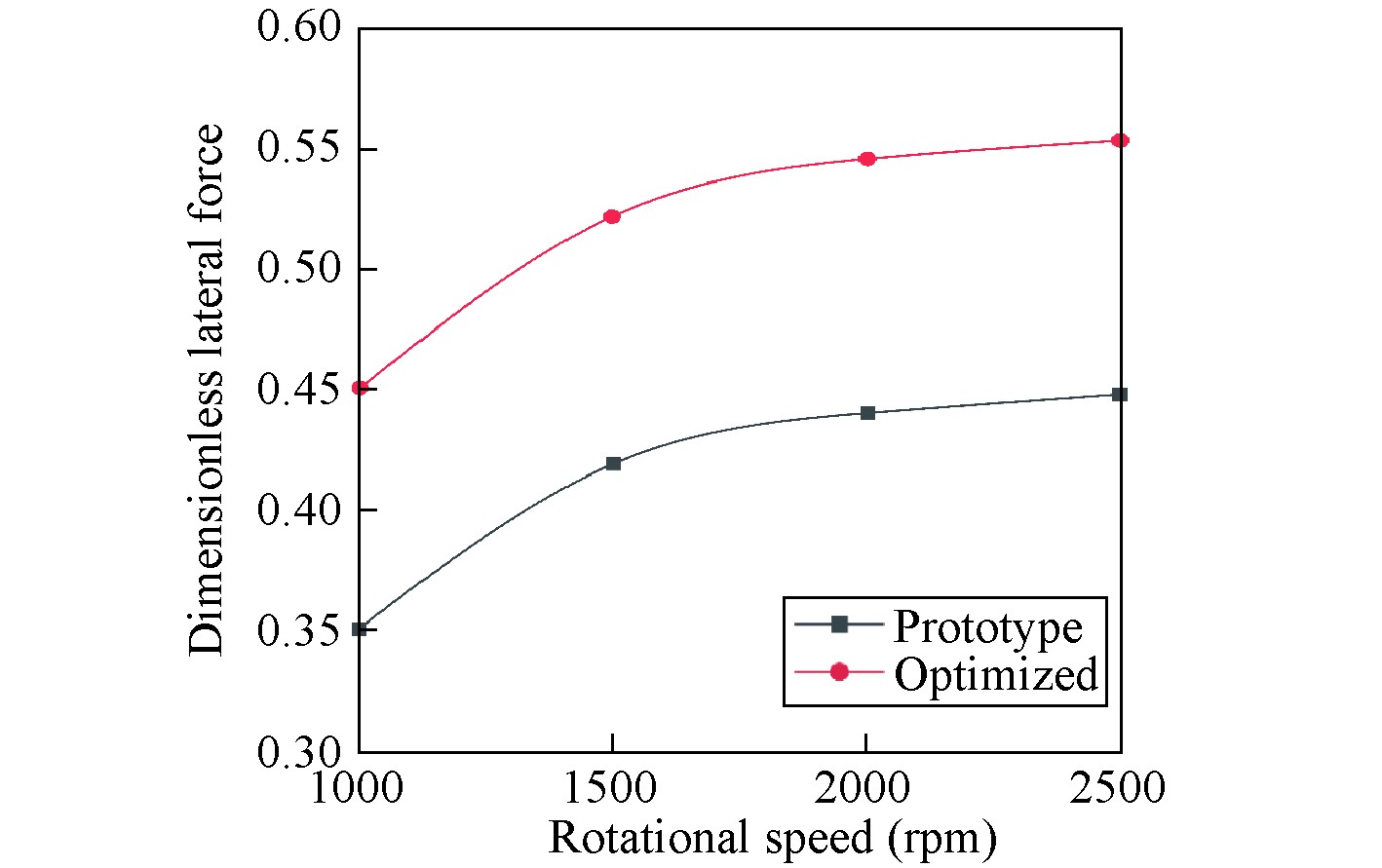
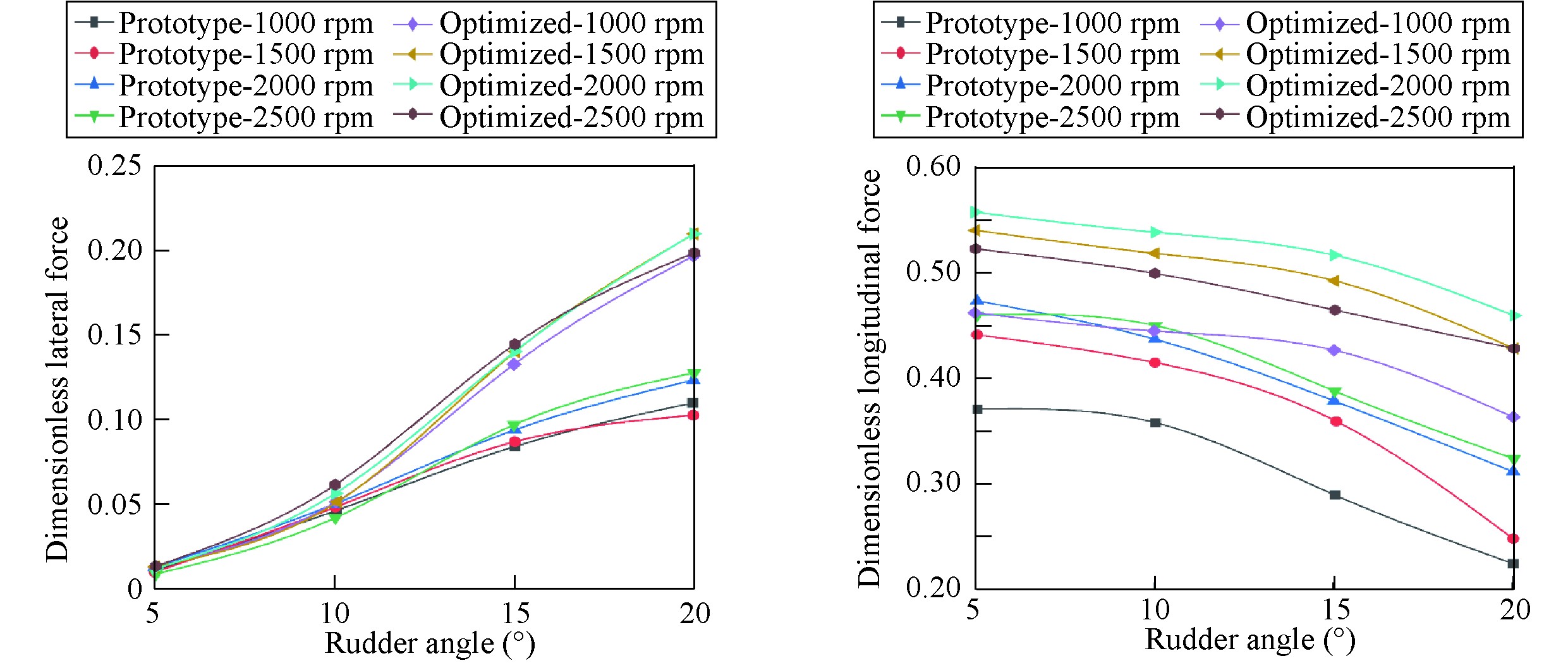
This study aims to enhance the maneuvering advantages of the waterjet unit through parametric design, performance evaluation, and optimization of the one-piece waterjet propulsion steering and reversing gear (SRG). The SRG’s performance evaluation stems mainly from the effect of the free surface, the varying sailing speeds of the ship, and its performance while functioning at the stern of the waterjet-propelled vessel. Parameters such as the length, width, and height of the steering gear, as well as the inclination, width, and curvature of the reversing gear, significantly influence the SRG. Although the free surface has a great impact on the force of the SRG, its performance trend remains unaffected. When the SRG operates at the stern of the ship, the optimized scheme’s lateral force improves by an average of 8.08% for sailing with a rudder angle condition and an average of 45.69% for reversing sailing with a rudder angle condition. The longitudinal force of the optimized scheme improves by more than 23% when sailing without a rudder angle condition and by an average of 31.75% when sailing with a reversed rudder angle condition. Additionally, the speed of the rotor has a minimal effect on the lateral force and a significant effect on the longitudinal force.
This study aims to enhance the maneuvering advantages of the waterjet unit through parametric design, performance evaluation, and optimization of the one-piece waterjet propulsion steering and reversing gear (SRG). The SRG’s performance evaluation stems mainly from the effect of the free surface, the varying sailing speeds of the ship, and its performance while functioning at the stern of the waterjet-propelled vessel. Parameters such as the length, width, and height of the steering gear, as well as the inclination, width, and curvature of the reversing gear, significantly influence the SRG. Although the free surface has a great impact on the force of the SRG, its performance trend remains unaffected. When the SRG operates at the stern of the ship, the optimized scheme’s lateral force improves by an average of 8.08% for sailing with a rudder angle condition and an average of 45.69% for reversing sailing with a rudder angle condition. The longitudinal force of the optimized scheme improves by more than 23% when sailing without a rudder angle condition and by an average of 31.75% when sailing with a reversed rudder angle condition. Additionally, the speed of the rotor has a minimal effect on the lateral force and a significant effect on the longitudinal force.

2025, 39(2)
:280-289.
doi: 10.1007/s13344-025-0020-y
Abstract:
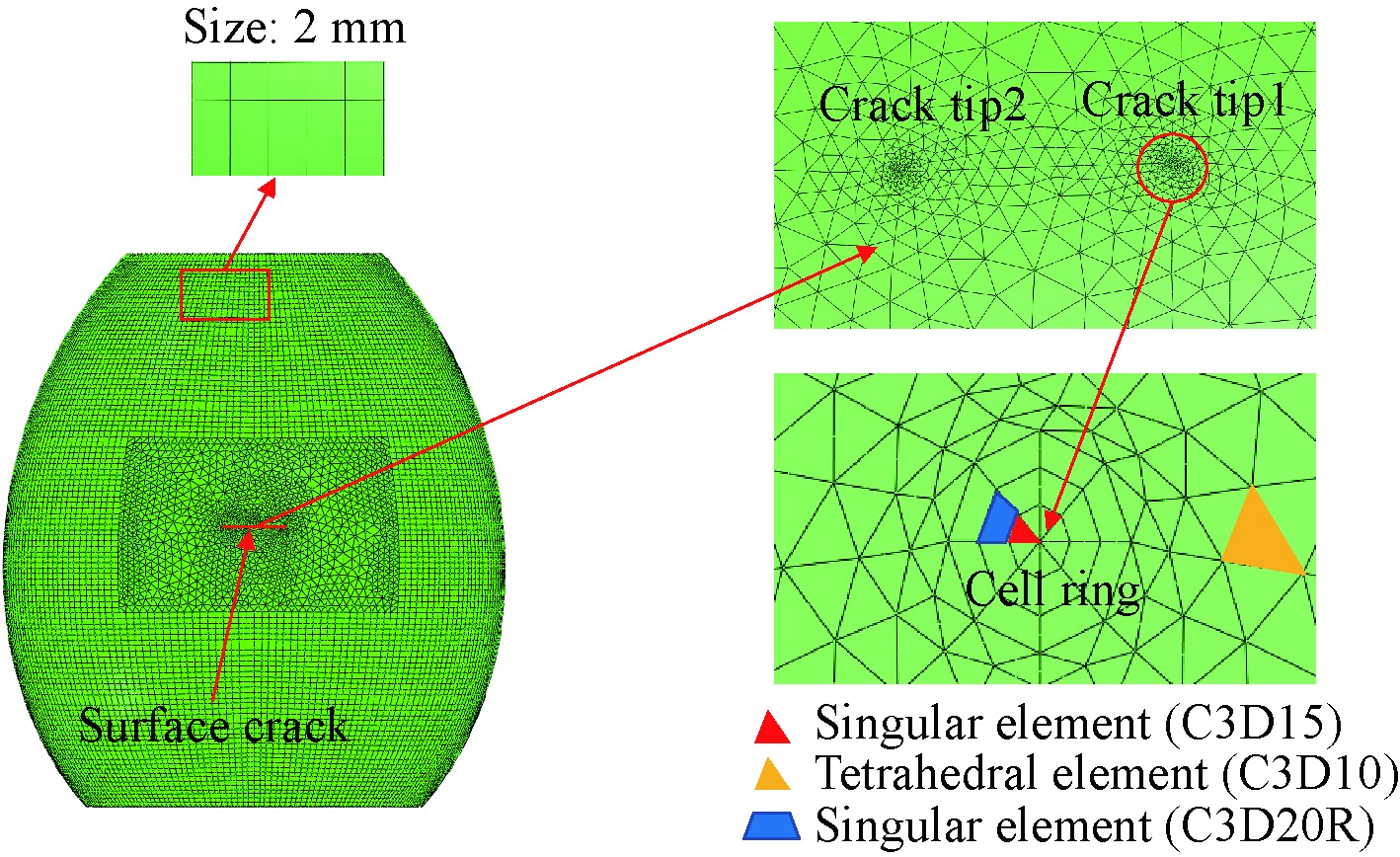
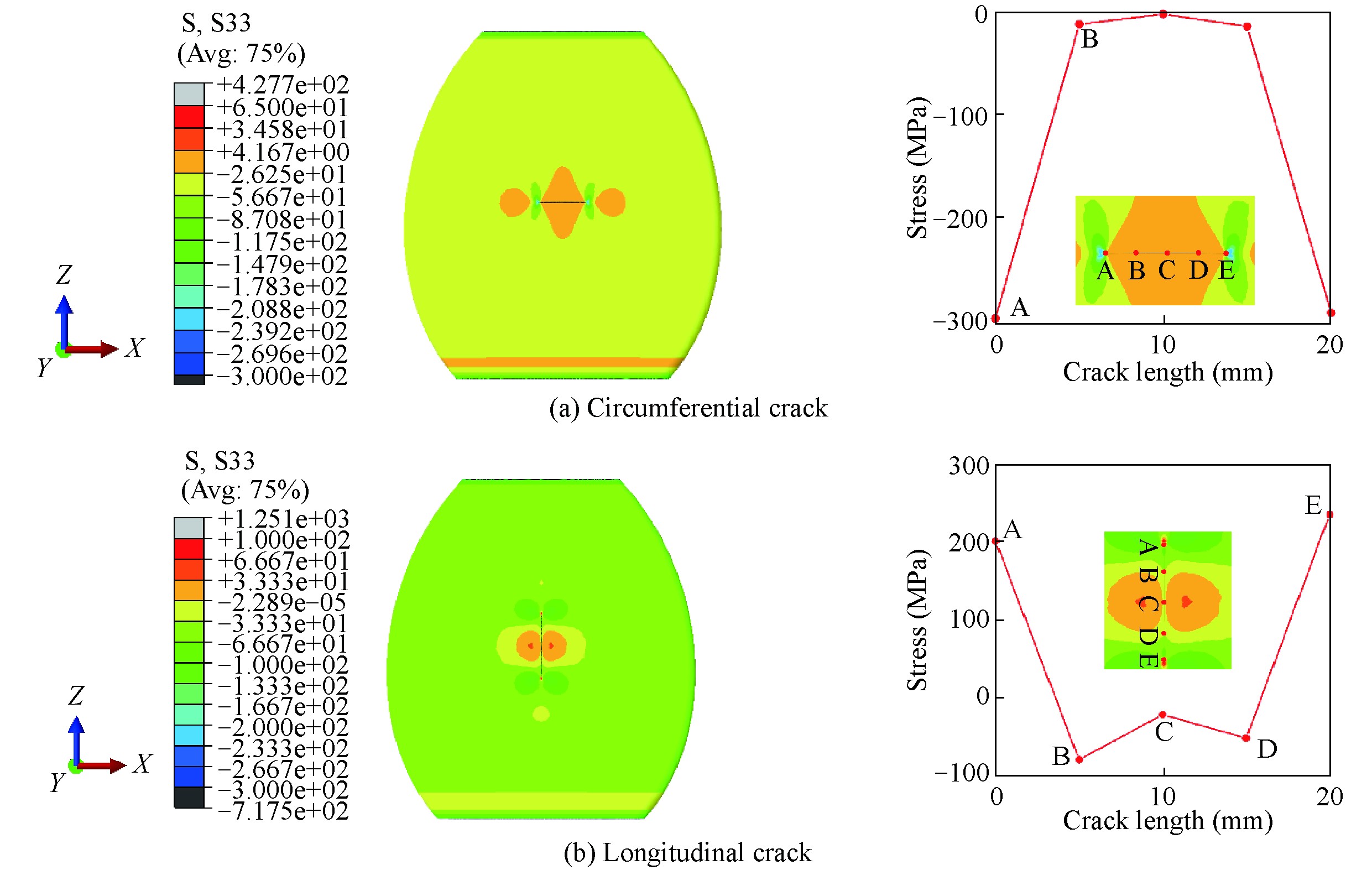
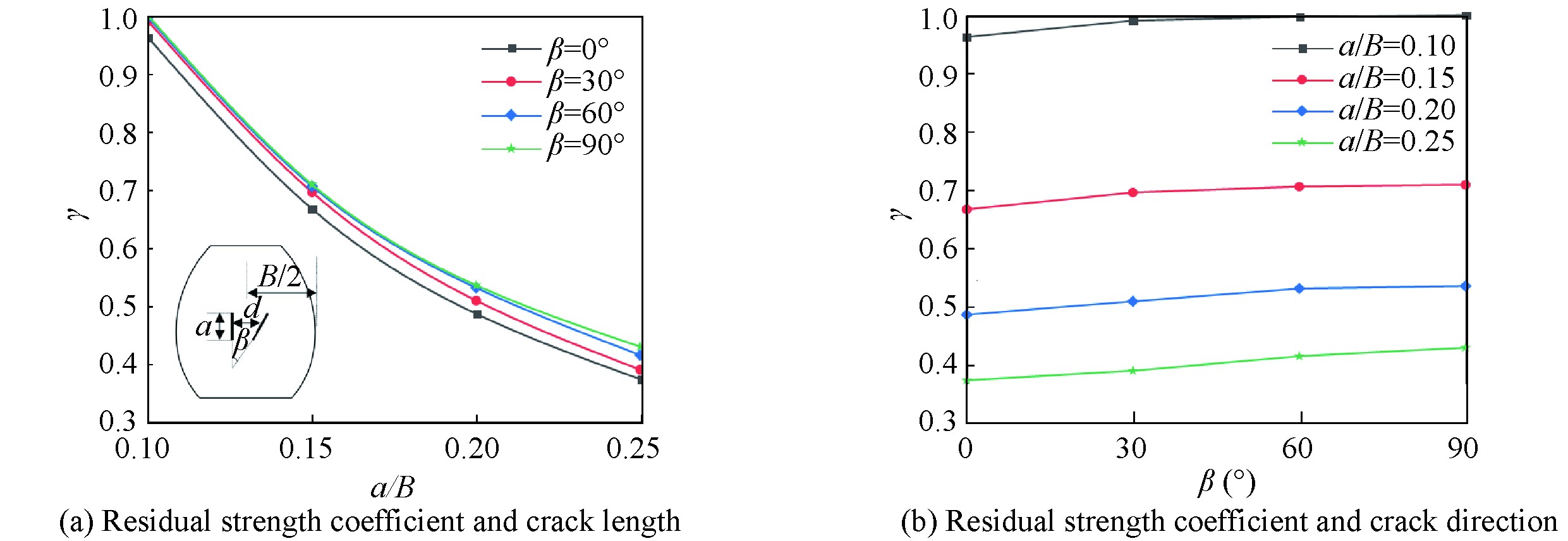
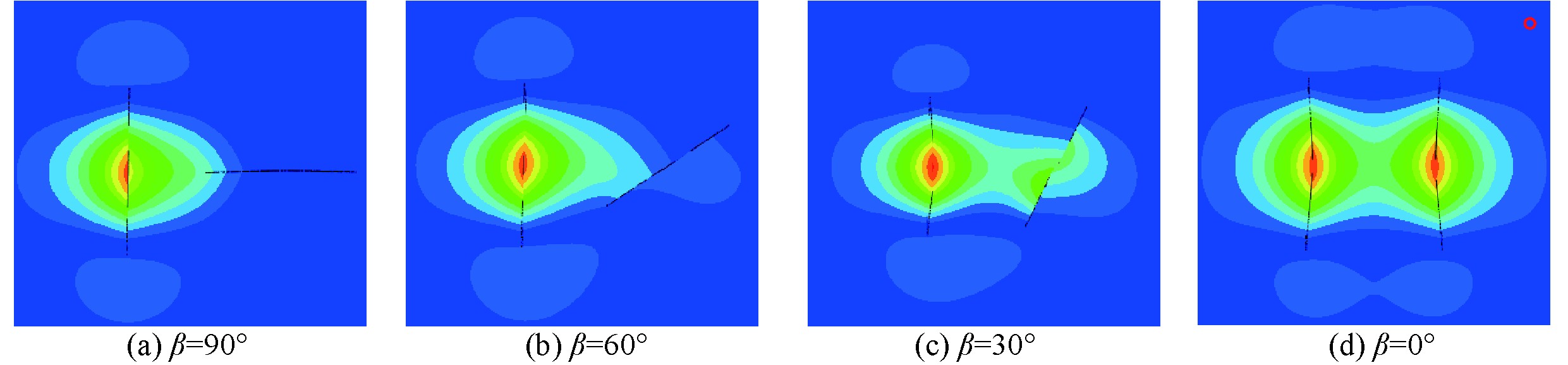
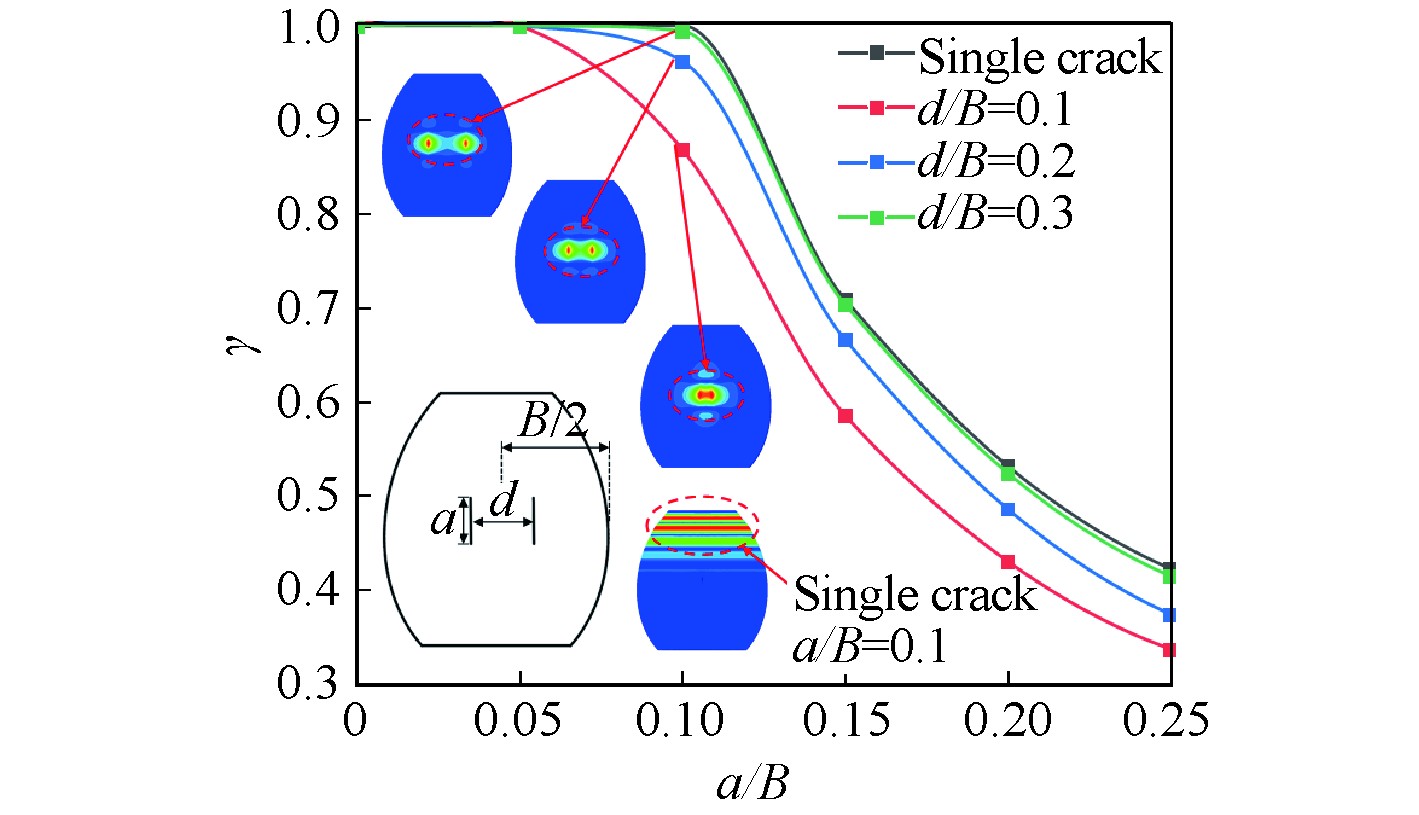
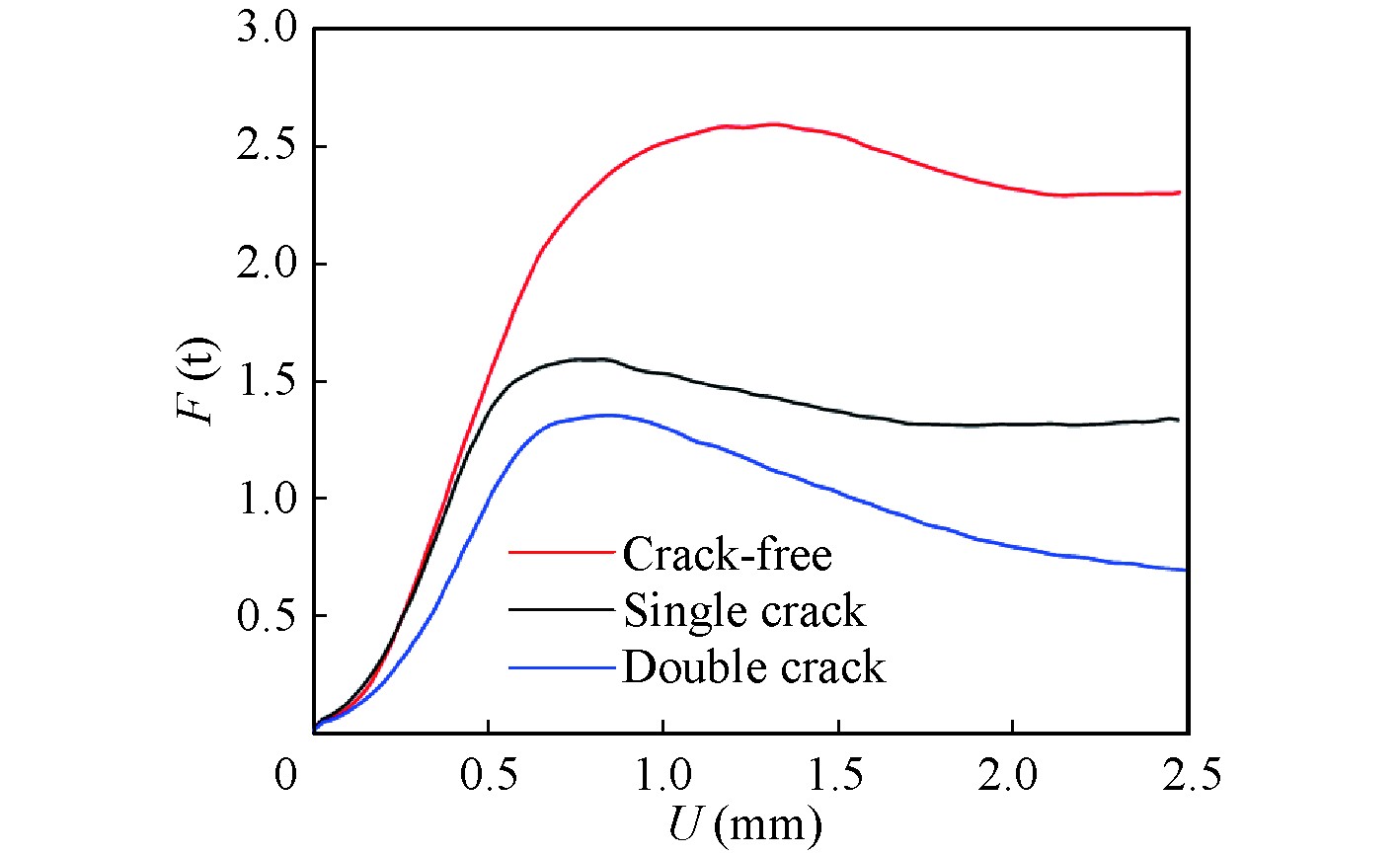
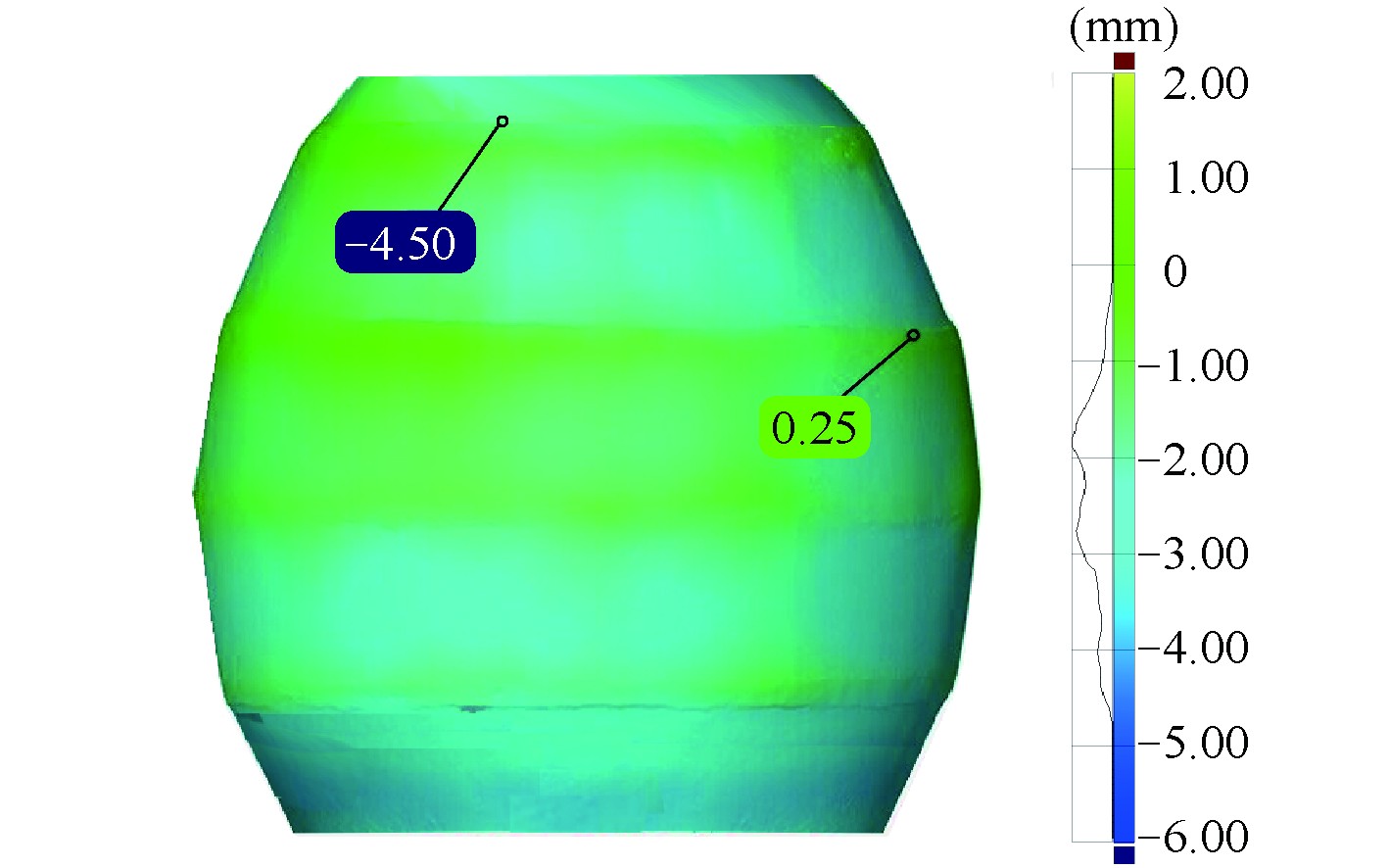
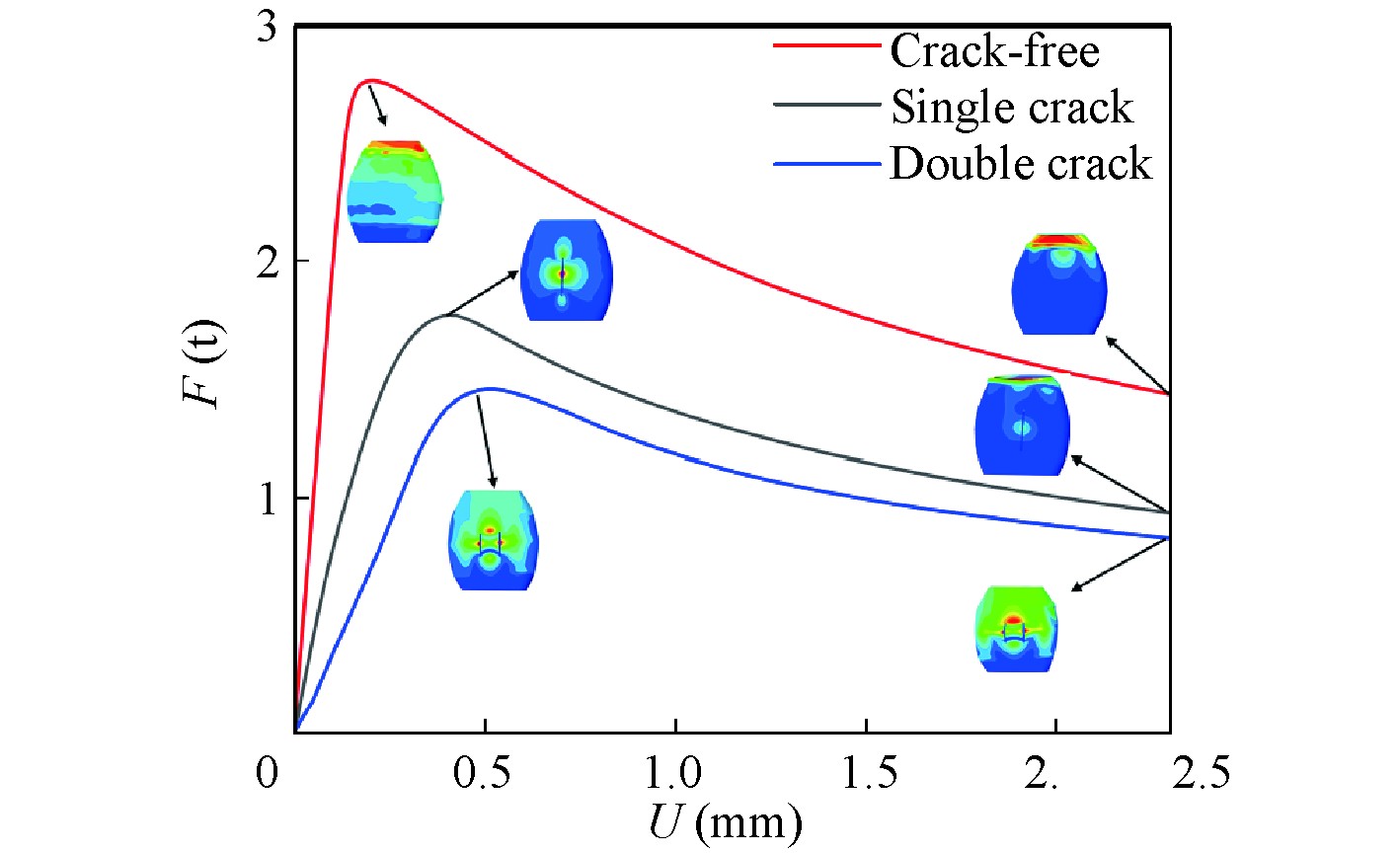
This study focused on the buckling characteristics of egg-shaped shells with single crack and double cracks under axial pressure. First, the geometric parameters of the egg-shaped shell were designed, and a numerical model of the egg-shaped shell was established. Then, the initial crack was introduced into the equatorial weld of the egg-shaped shell, and the effects of the crack on the buckling characteristics under different wall thicknesses were explored, as were the effects of the single crack direction, double crack angle and spacing on the buckling characteristics. Finally, crack-free, single crack and double crack egg-shaped shells were fabricated from Q235 steel. The buckling loads and failure modes of the three egg-shaped shells were obtained via axial compression experiments. The numerical critical buckling loads and buckling modes were compared with the experimental results to verify the accuracy of the numerical model. The results of this study are valuable for the design of egg-shaped shells under axial loading.
This study focused on the buckling characteristics of egg-shaped shells with single crack and double cracks under axial pressure. First, the geometric parameters of the egg-shaped shell were designed, and a numerical model of the egg-shaped shell was established. Then, the initial crack was introduced into the equatorial weld of the egg-shaped shell, and the effects of the crack on the buckling characteristics under different wall thicknesses were explored, as were the effects of the single crack direction, double crack angle and spacing on the buckling characteristics. Finally, crack-free, single crack and double crack egg-shaped shells were fabricated from Q235 steel. The buckling loads and failure modes of the three egg-shaped shells were obtained via axial compression experiments. The numerical critical buckling loads and buckling modes were compared with the experimental results to verify the accuracy of the numerical model. The results of this study are valuable for the design of egg-shaped shells under axial loading.

2025, 39(2)
:290-302.
doi: 10.1007/s13344-025-0021-x
Abstract:
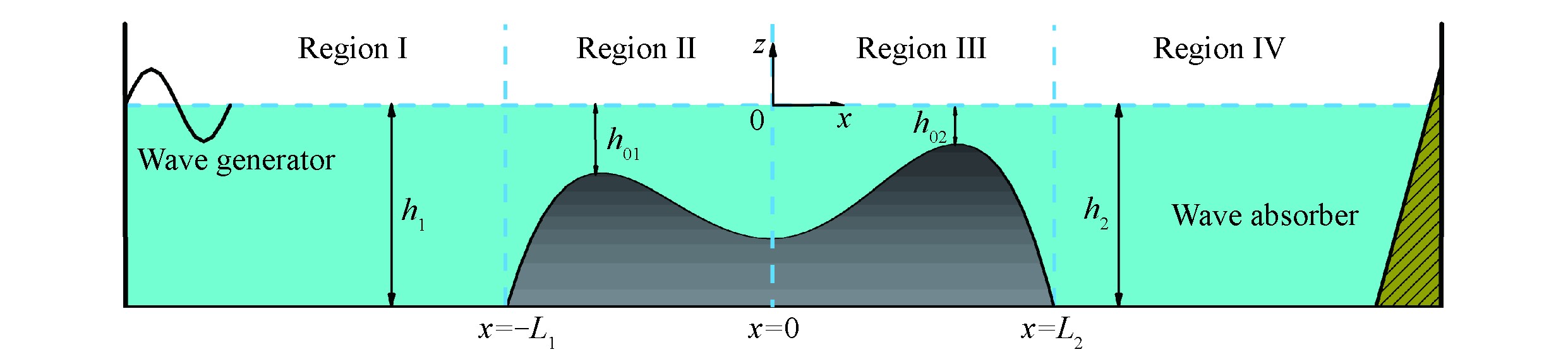
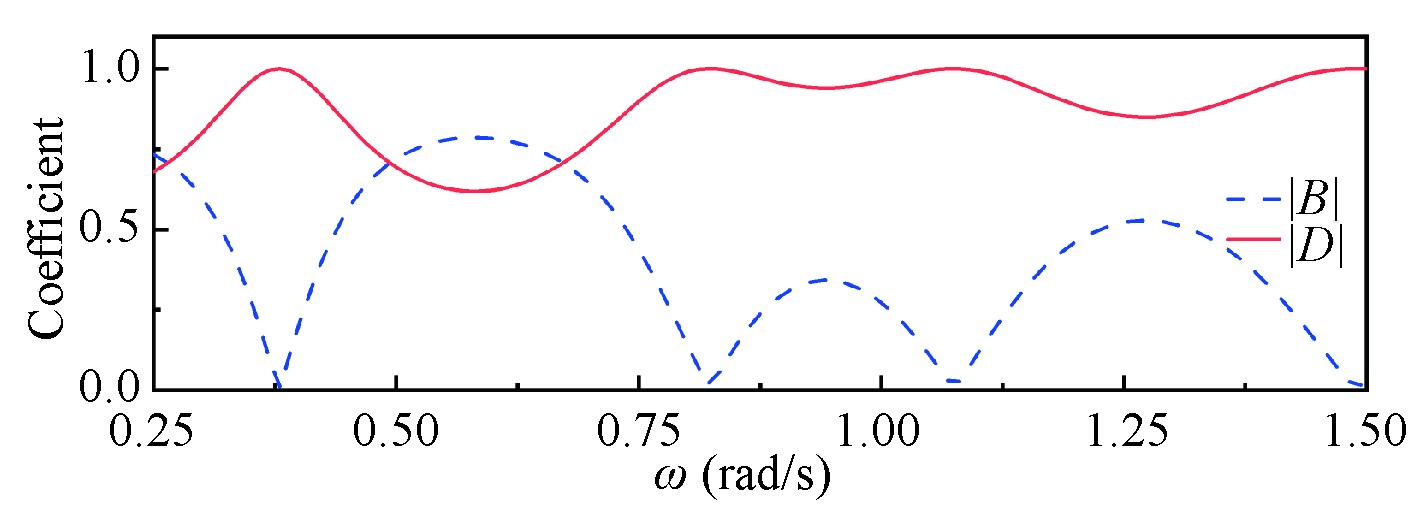
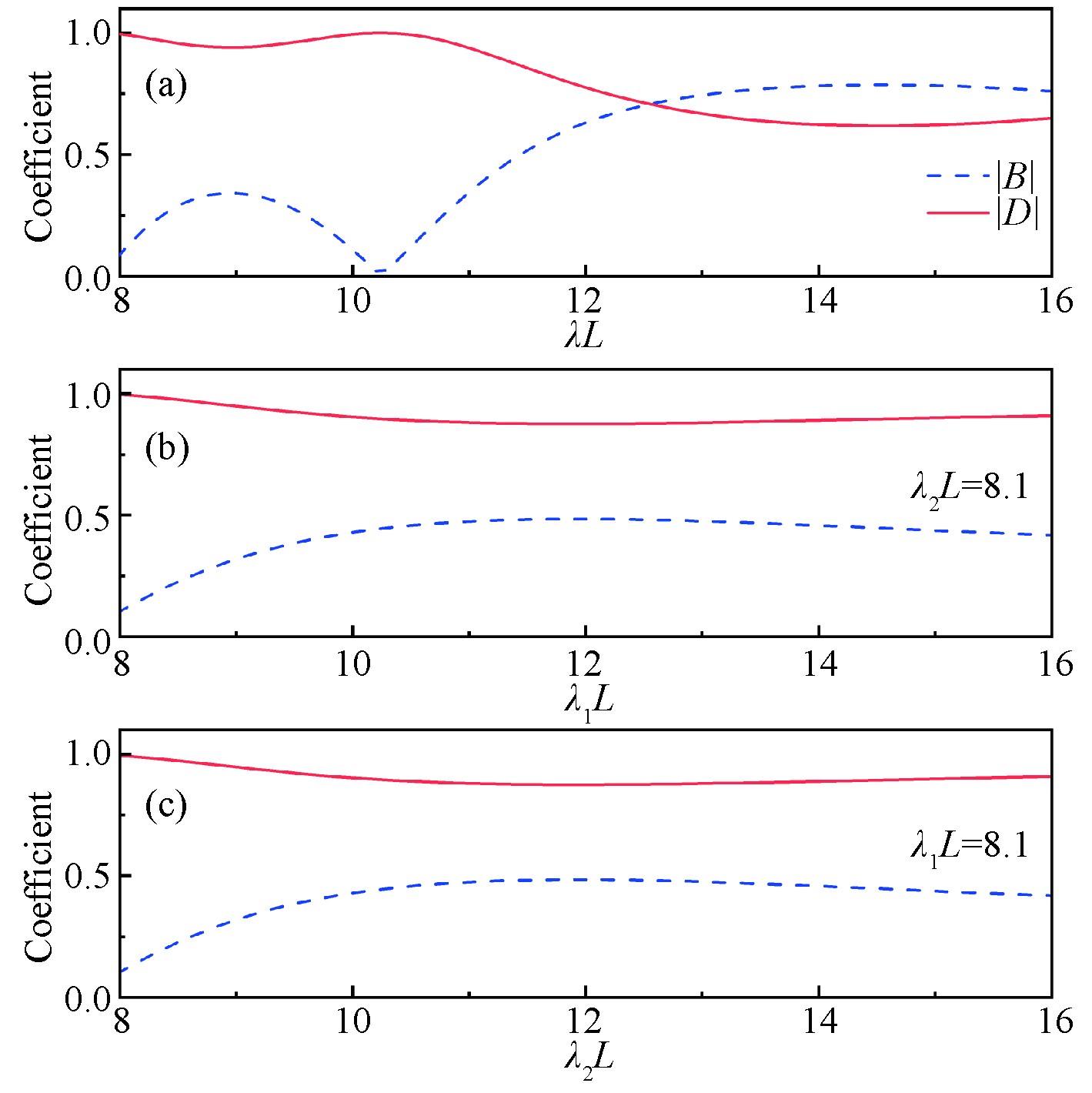
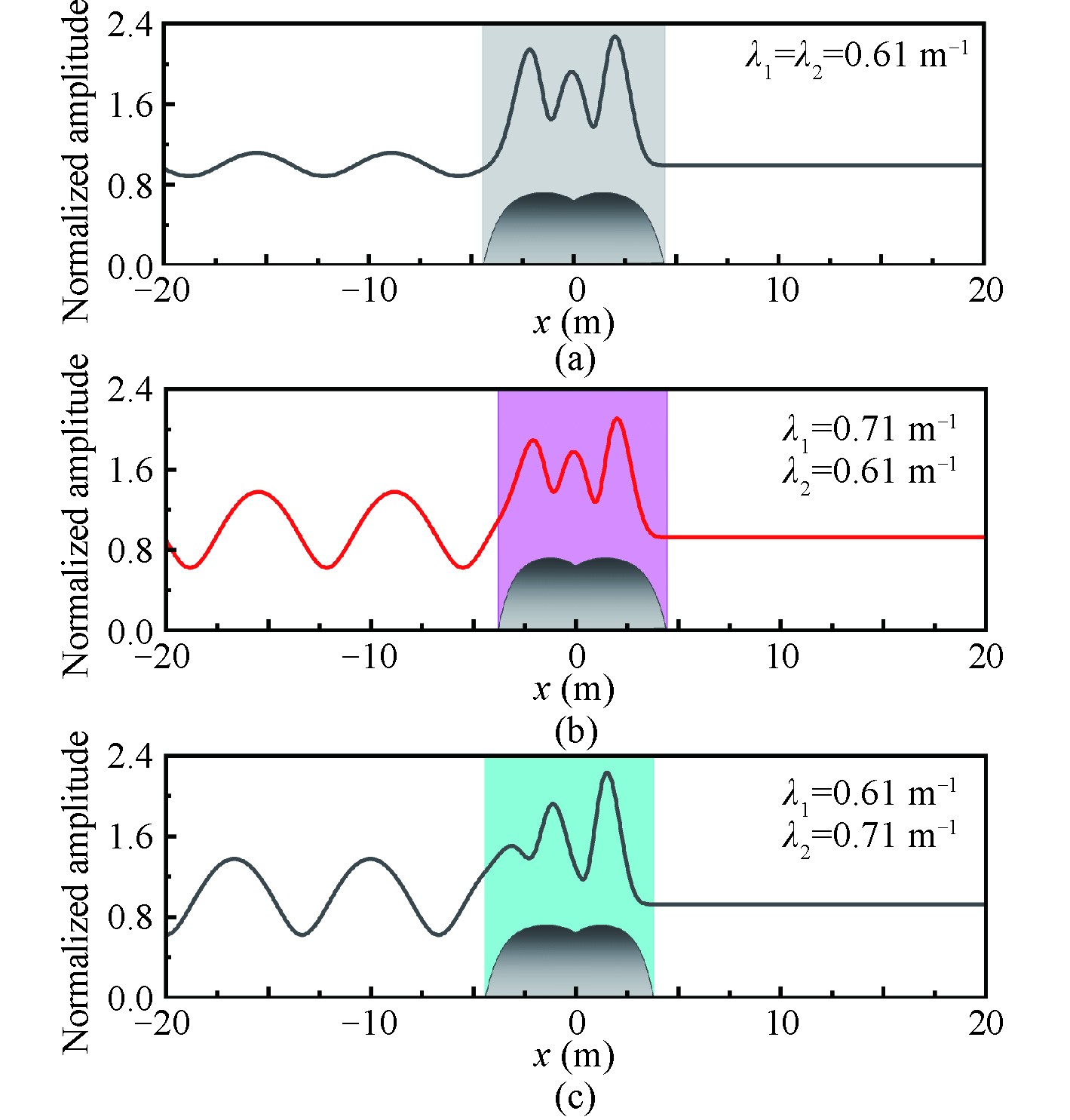
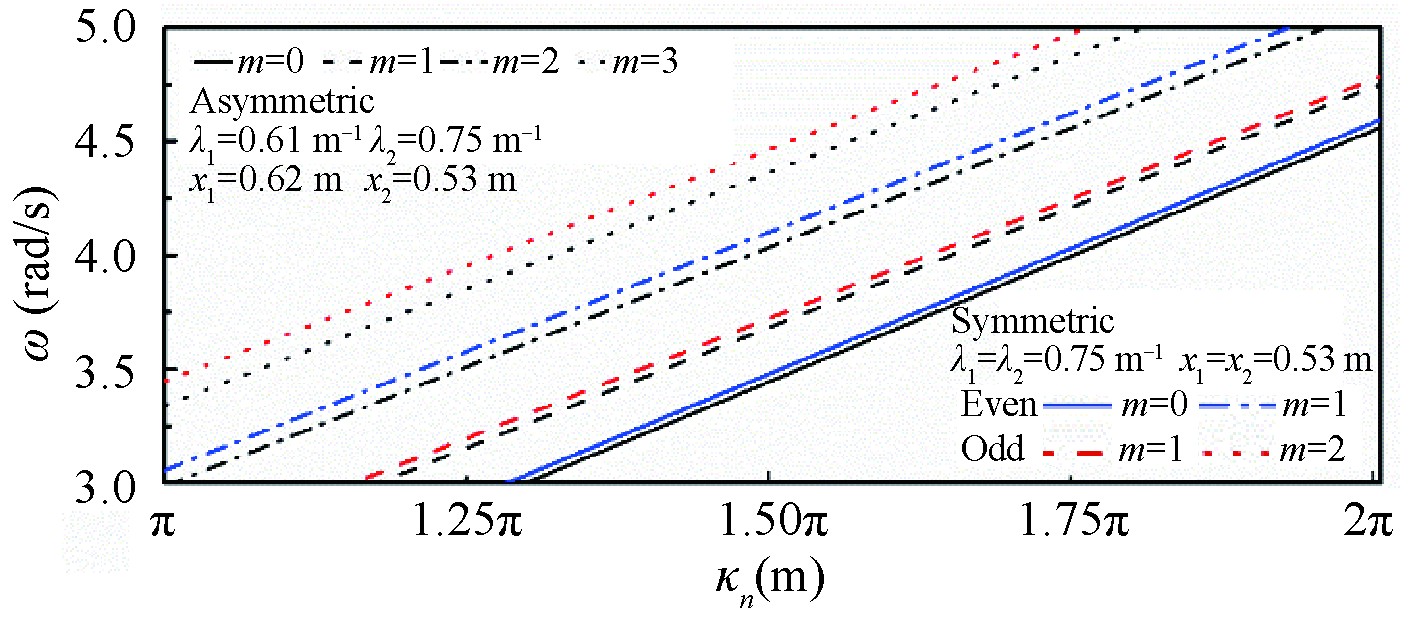
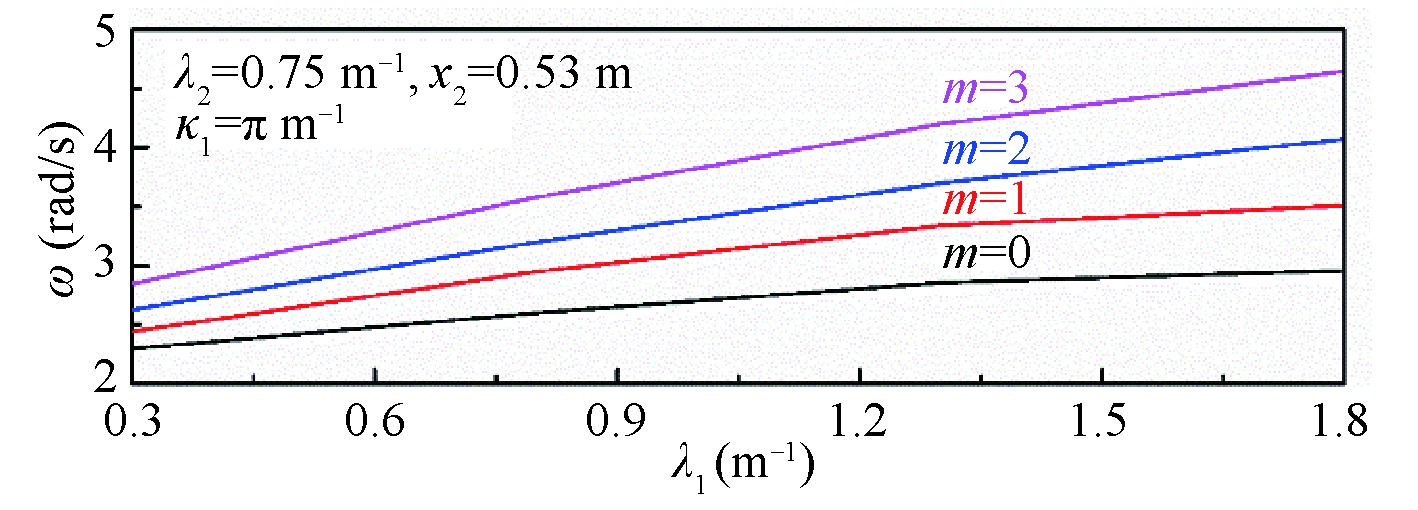
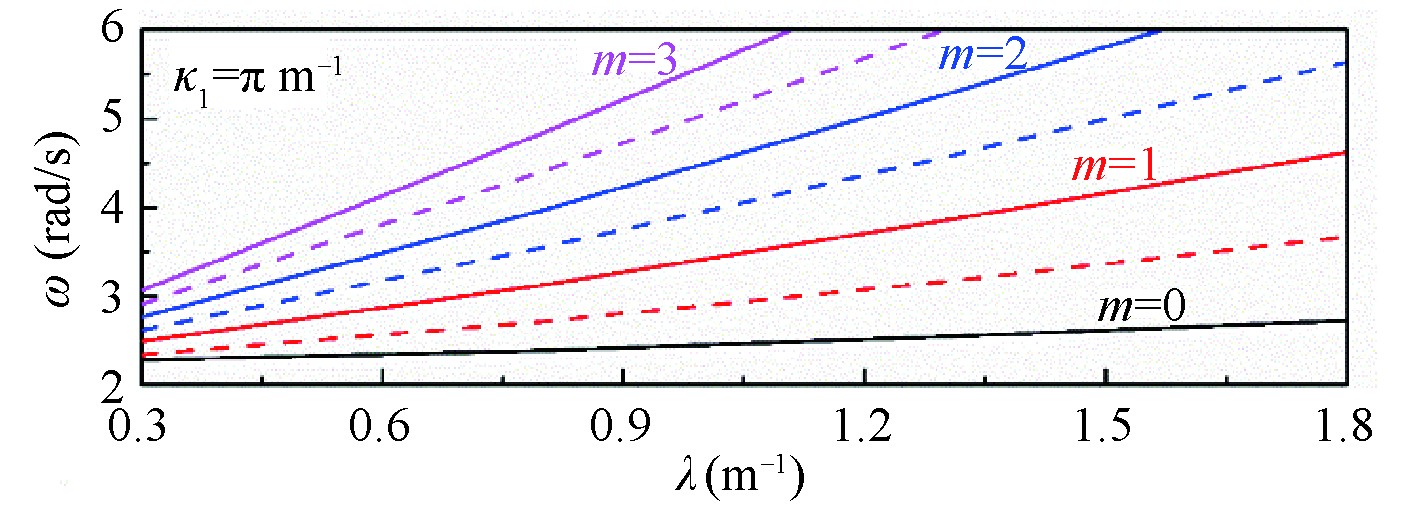
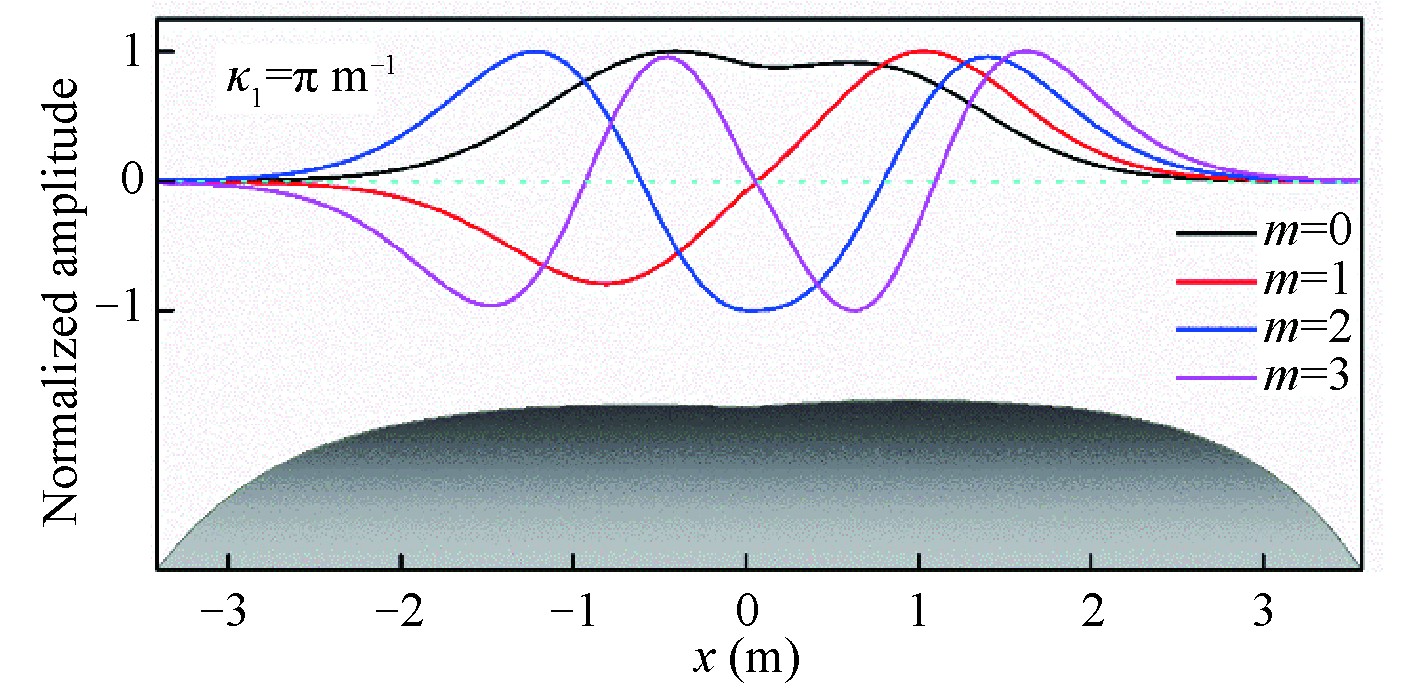
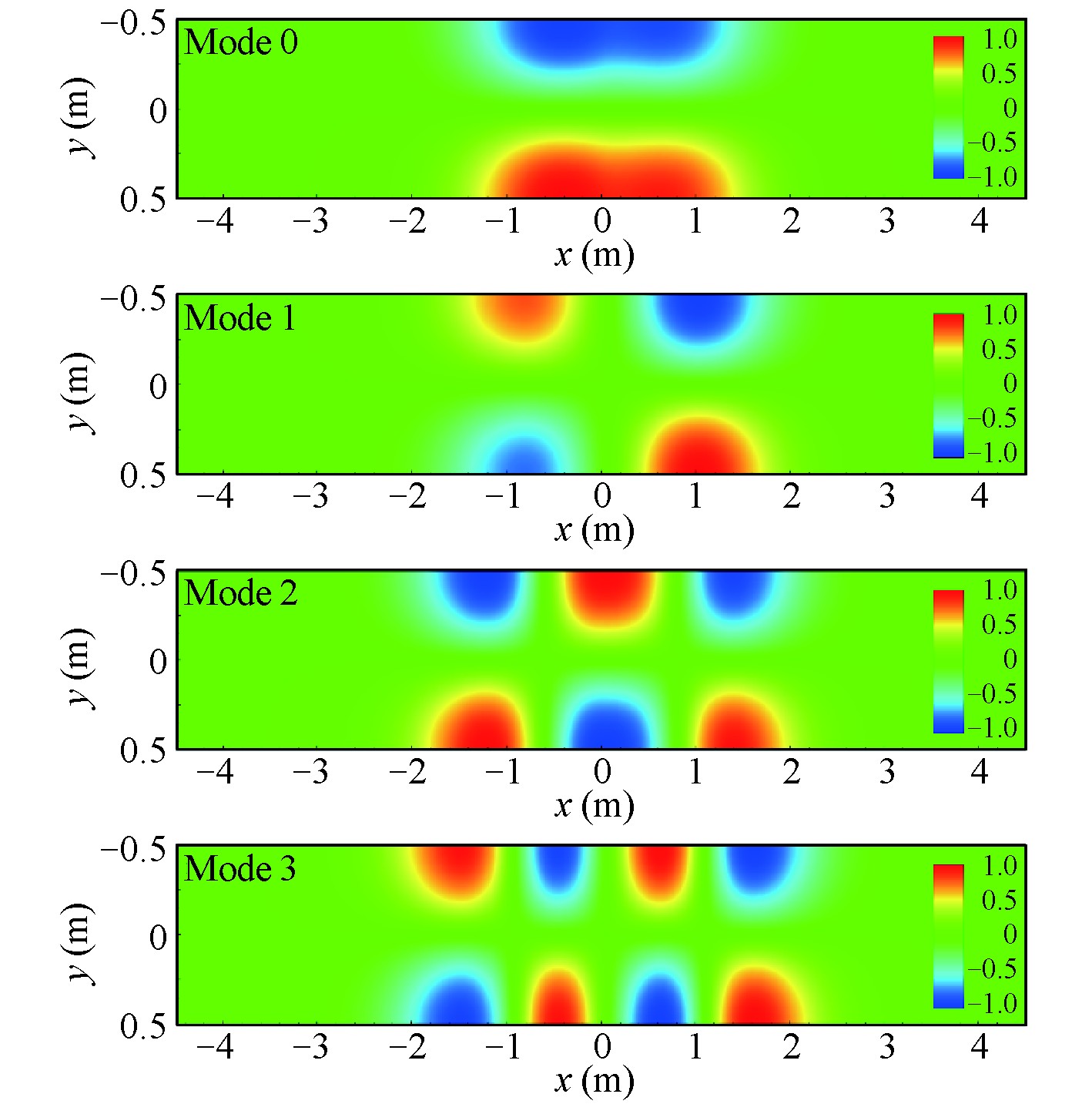
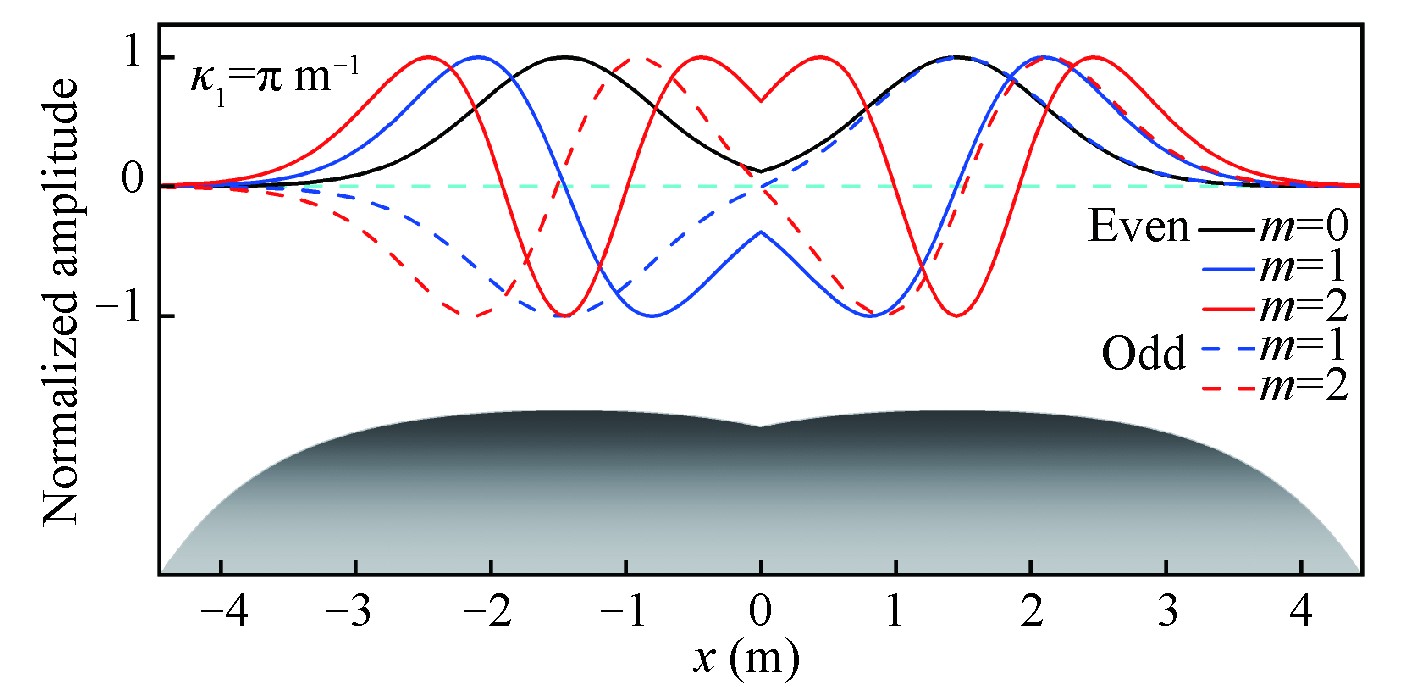
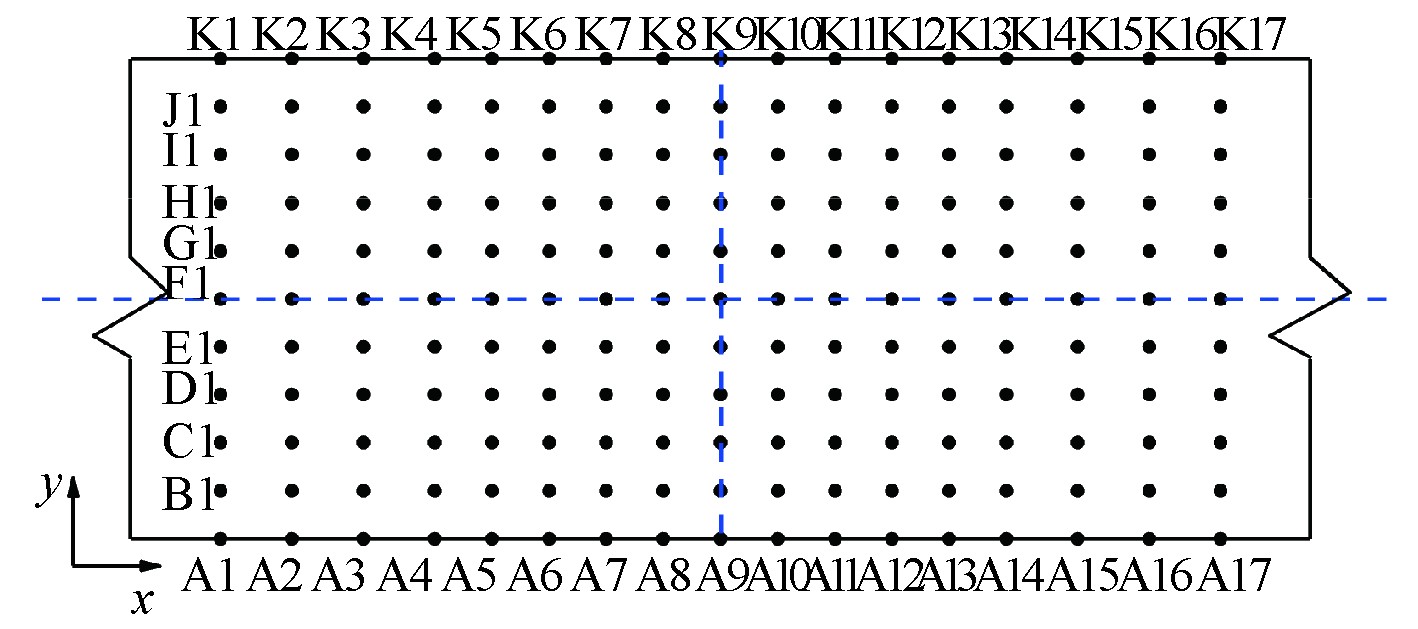
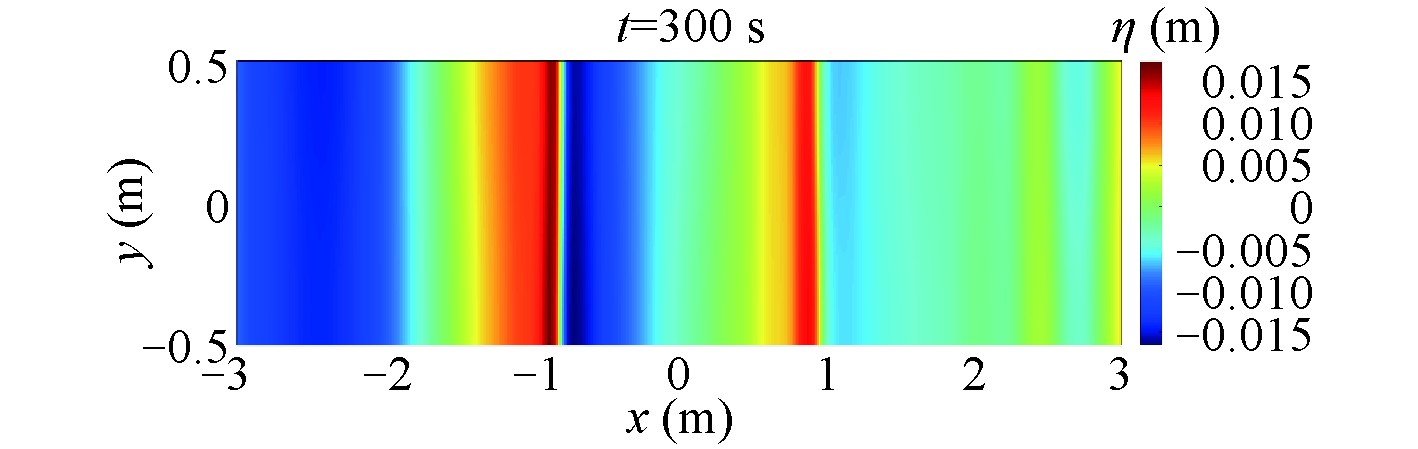
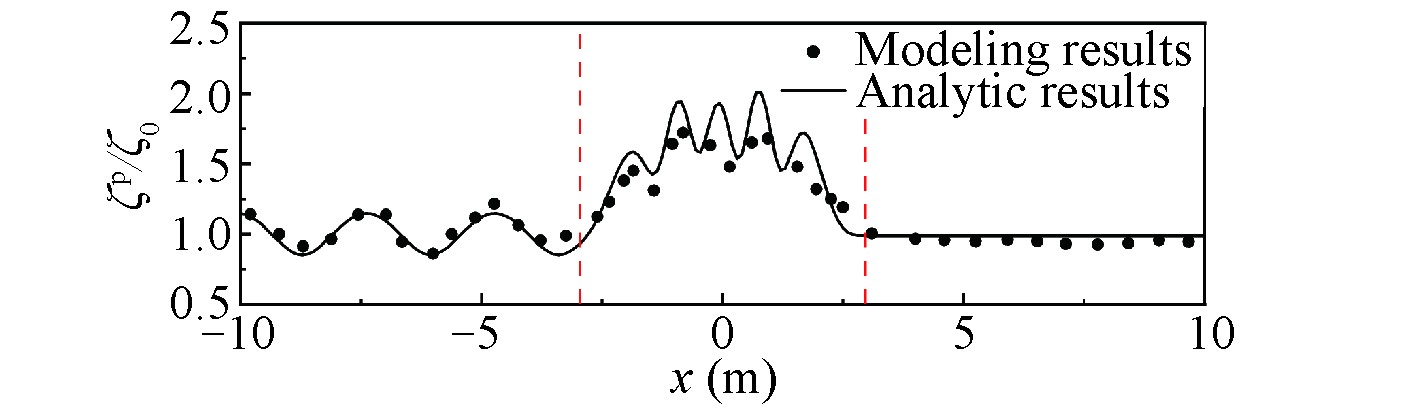
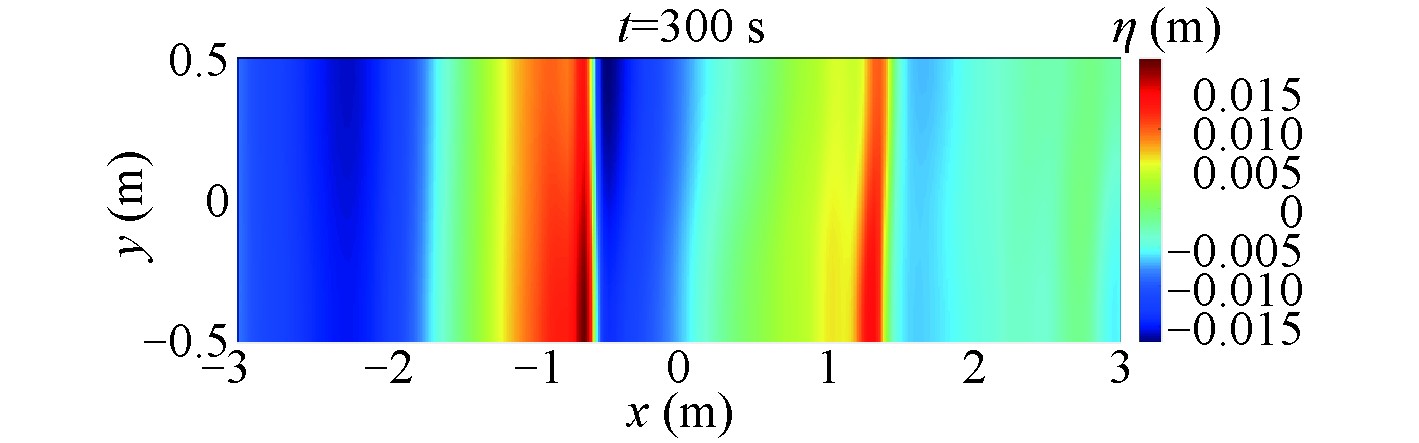
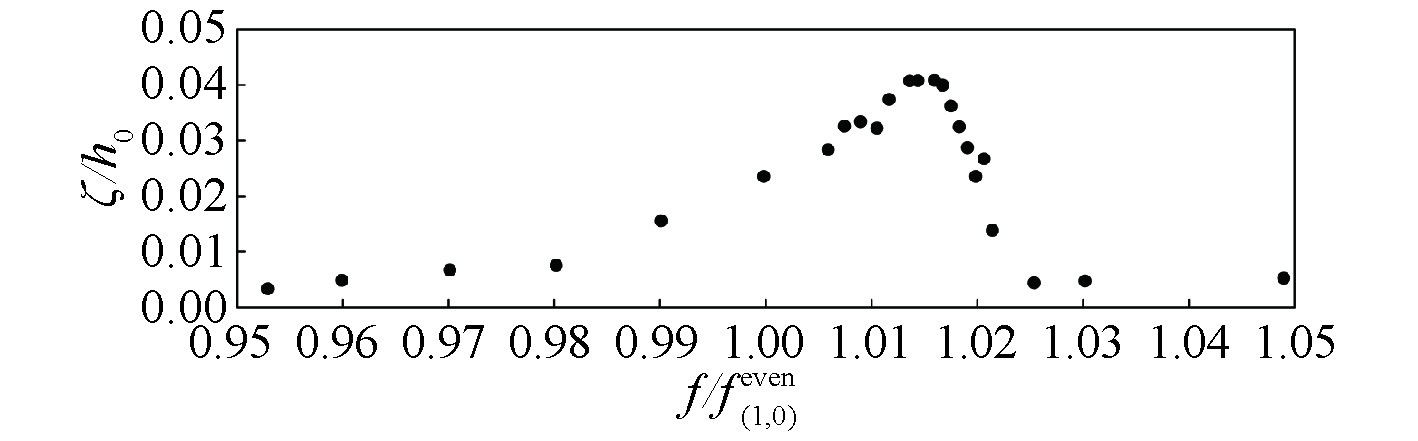
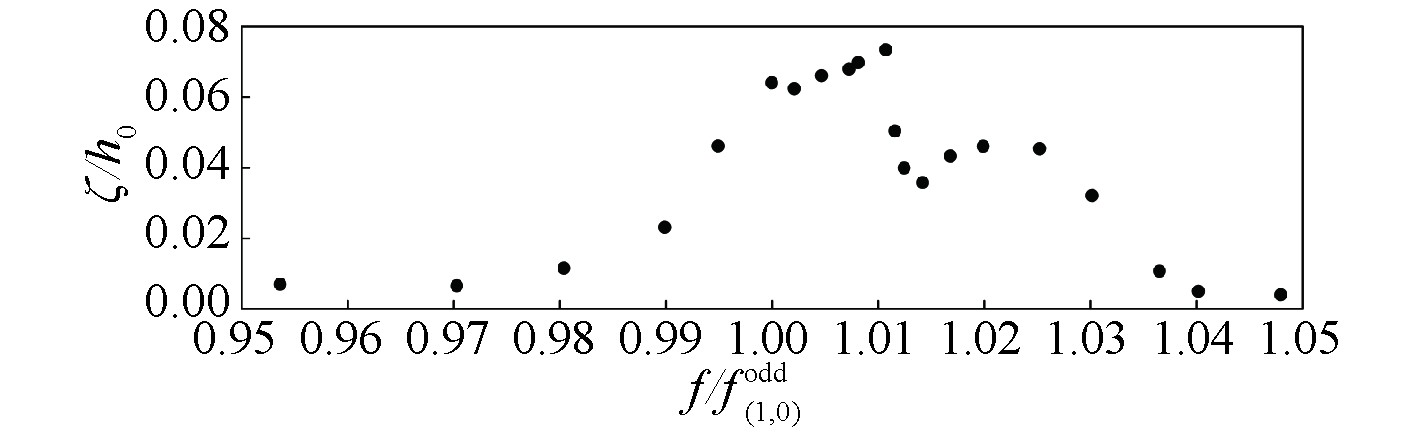
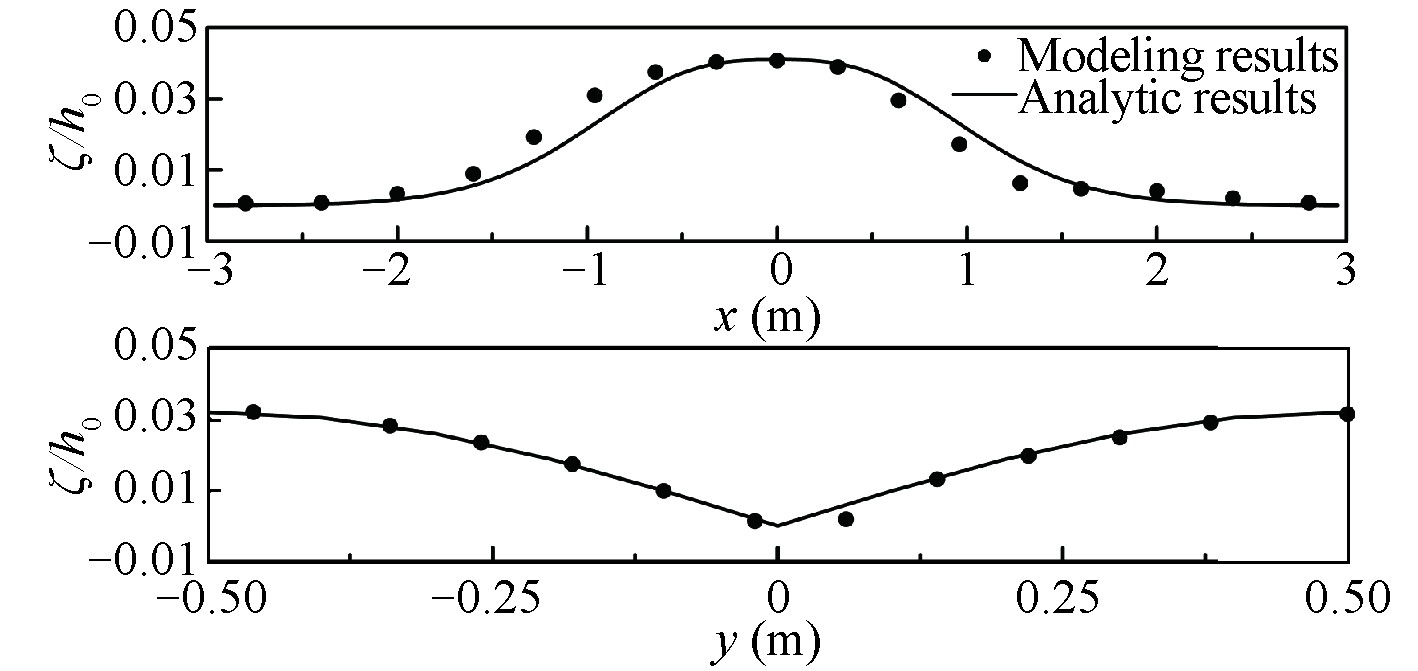
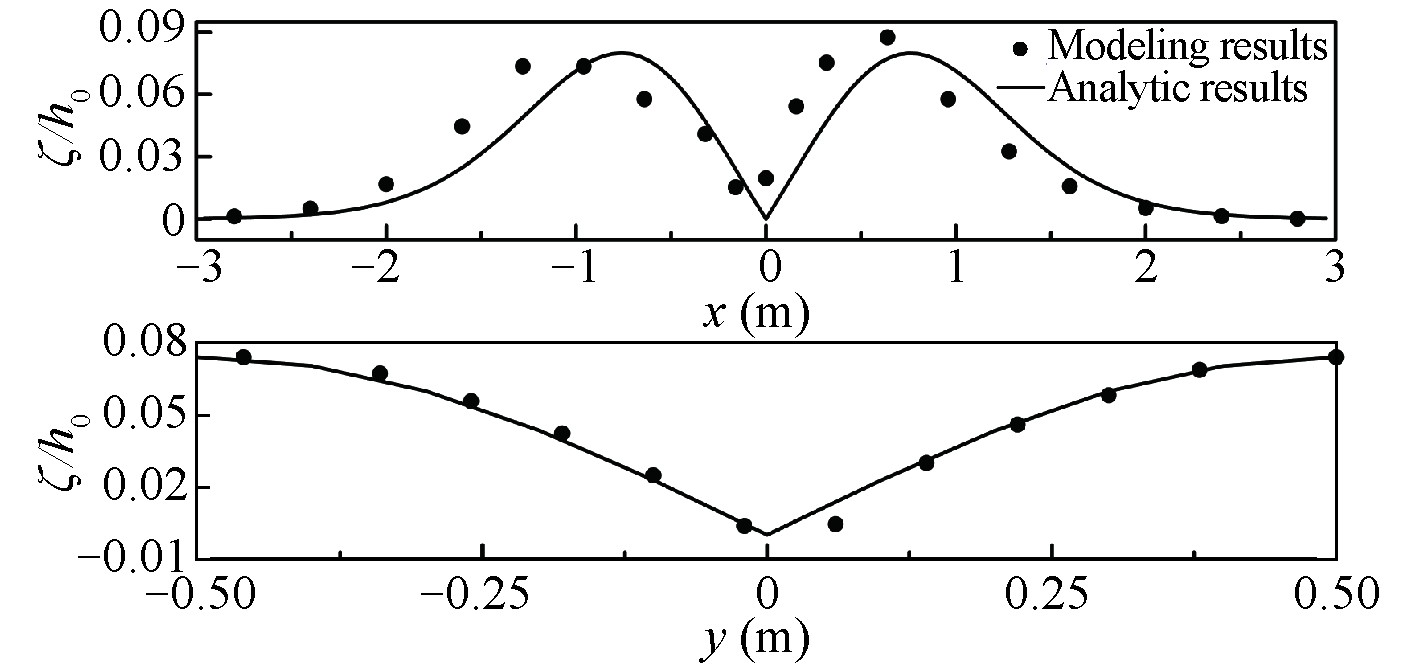
Flume experiments play a pivotal role in studying wave propagation, with wave elements typically assumed to remain constant in the perpendicular direction. However, evident cross wave phenomena were observed within flumes under certain conditions. This paper presents new analytical solutions for both primary and cross waves on double shoals in a flume via linear shallow-water equations, which may be used to idealize dynamic experimental configurations of coral reefs. The primary waves on double shoals are described by the associated Legendre functions, whereas the ultimate solutions are derived by considering the incident and reflected waves in front of a bathymetry and the transmitted waves positioned behind it. The effects of the angular frequency and topographic parameters on the primary waves are subsequently analyzed. Cross waves on double shoals constitute a type of topographically trapped wave whose solutions are formulated by combining the first and second types of the associated Legendre functions. The angular frequency is not only determined by the wavenumber but also influenced by the topographic parameters. Numerical experiments are conducted to investigate the generation mechanism of cross waves. The consistency between the numerical results and analytical solutions confirms the validity of the new analytical framework of cross waves on double shoals.
Flume experiments play a pivotal role in studying wave propagation, with wave elements typically assumed to remain constant in the perpendicular direction. However, evident cross wave phenomena were observed within flumes under certain conditions. This paper presents new analytical solutions for both primary and cross waves on double shoals in a flume via linear shallow-water equations, which may be used to idealize dynamic experimental configurations of coral reefs. The primary waves on double shoals are described by the associated Legendre functions, whereas the ultimate solutions are derived by considering the incident and reflected waves in front of a bathymetry and the transmitted waves positioned behind it. The effects of the angular frequency and topographic parameters on the primary waves are subsequently analyzed. Cross waves on double shoals constitute a type of topographically trapped wave whose solutions are formulated by combining the first and second types of the associated Legendre functions. The angular frequency is not only determined by the wavenumber but also influenced by the topographic parameters. Numerical experiments are conducted to investigate the generation mechanism of cross waves. The consistency between the numerical results and analytical solutions confirms the validity of the new analytical framework of cross waves on double shoals.
2025, 39(2)
:303-315.
doi: 10.1007/s13344-025-0022-9
Abstract:
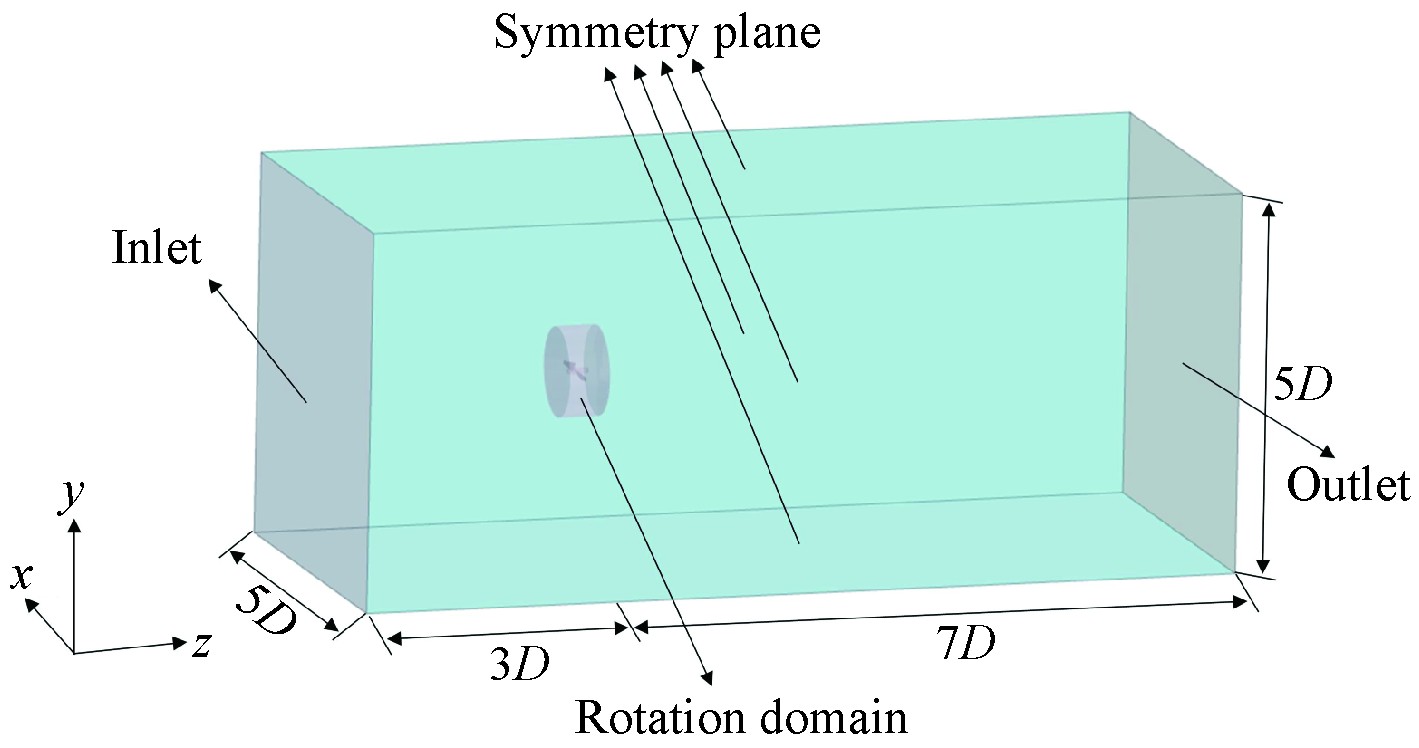
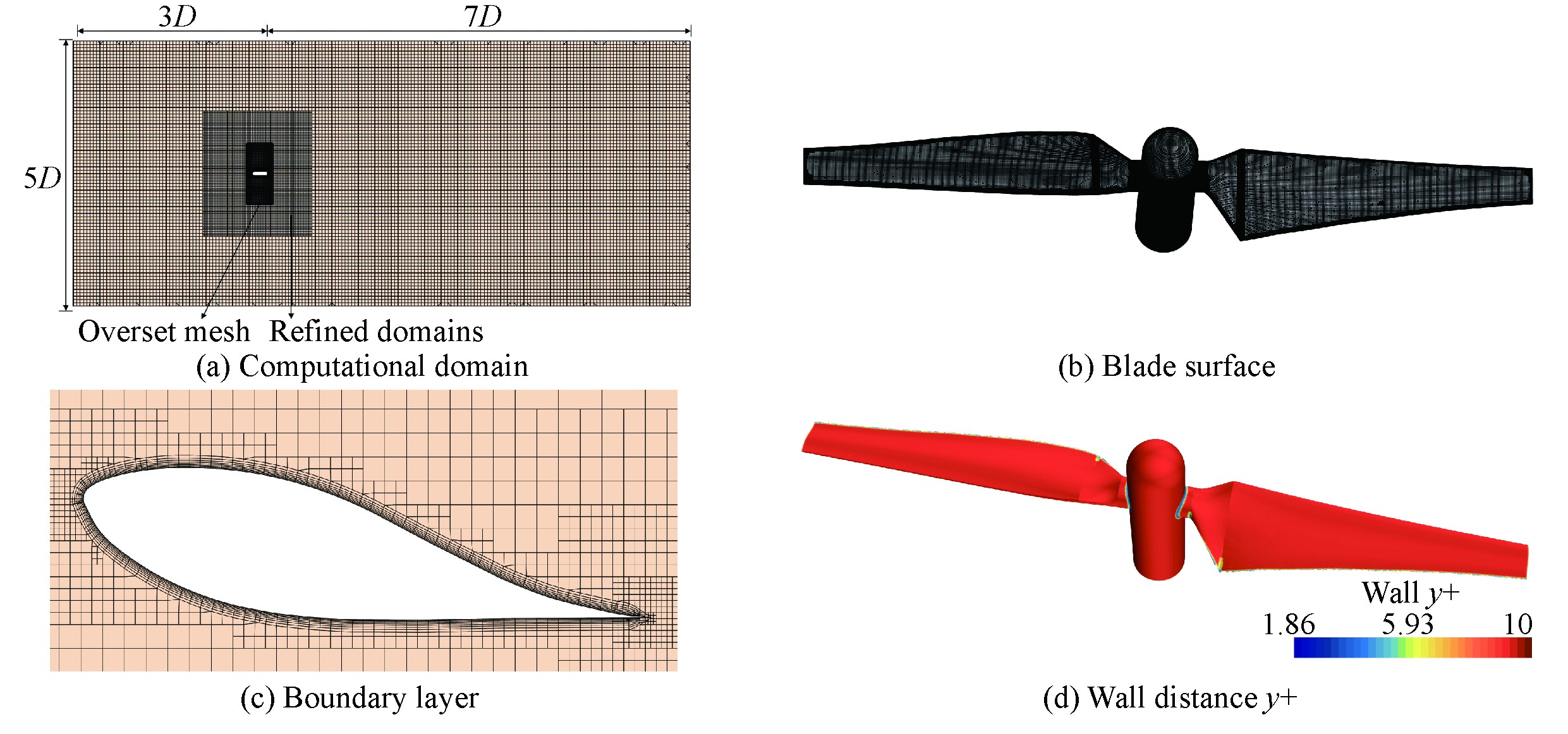
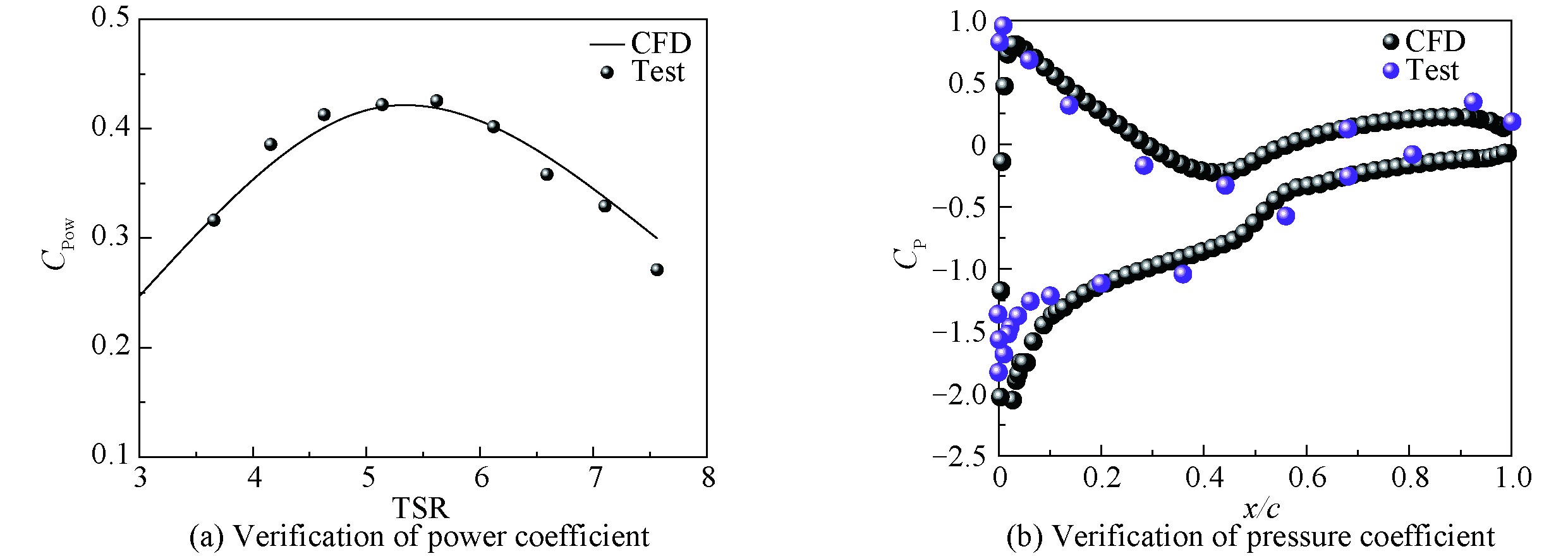
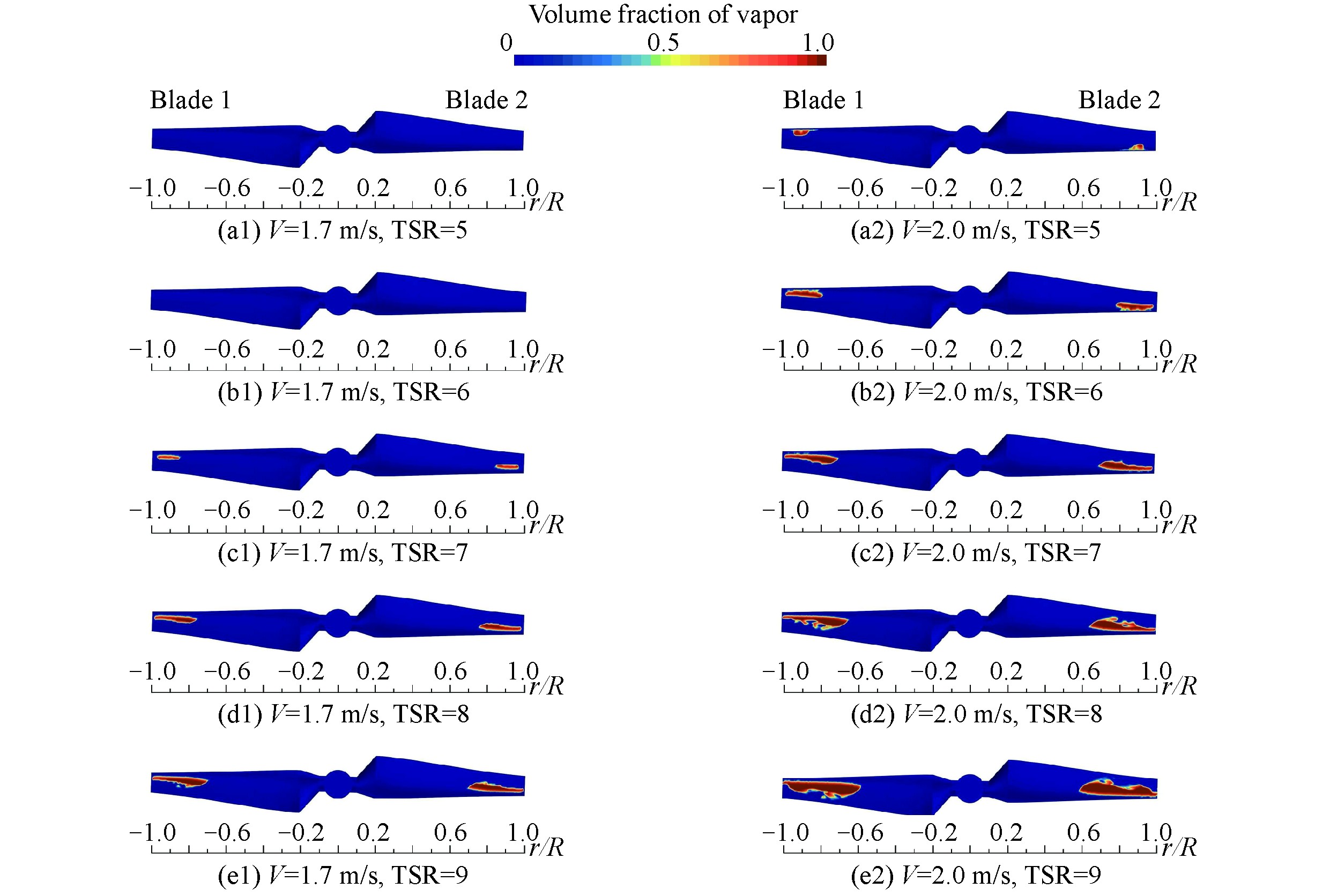
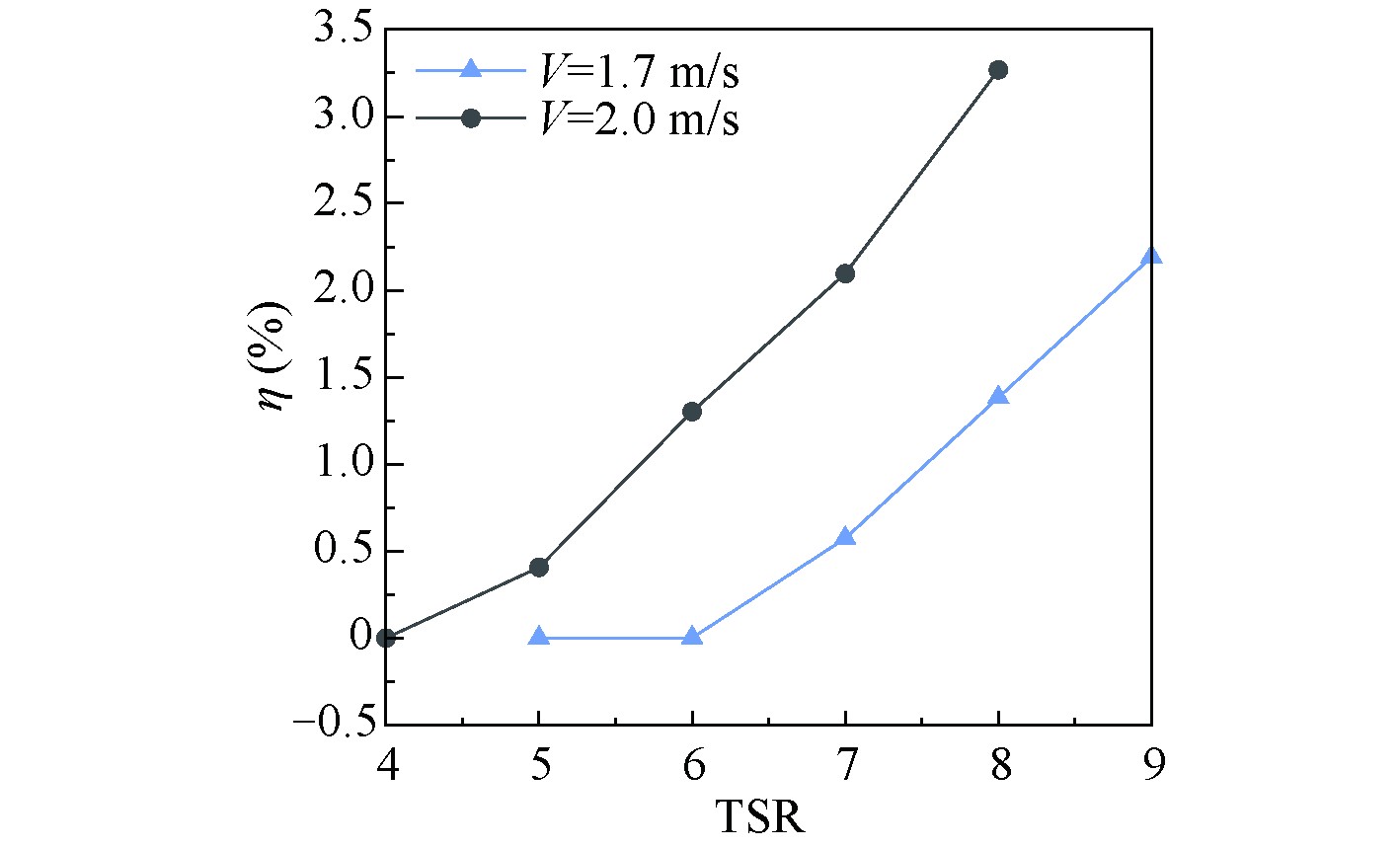
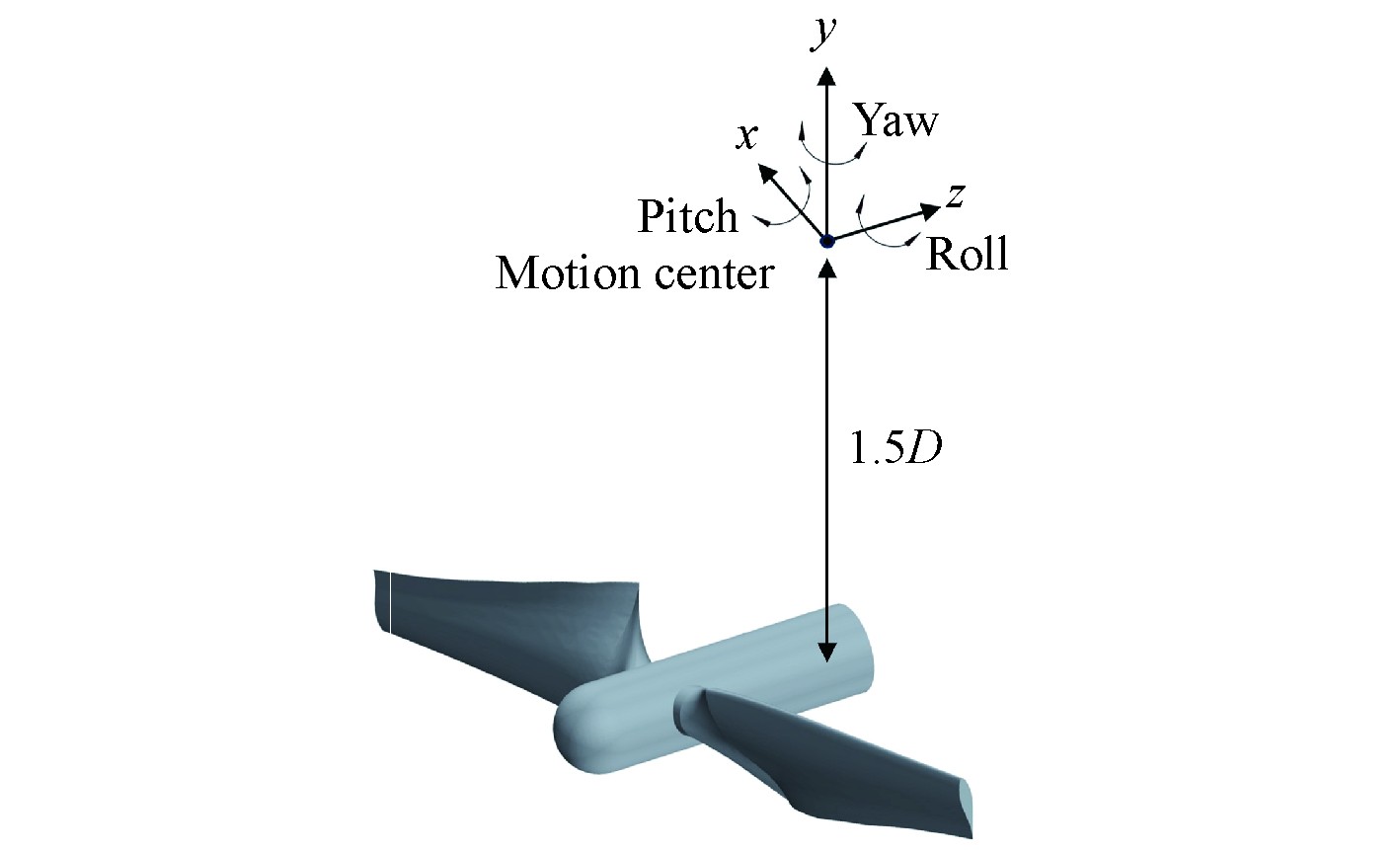
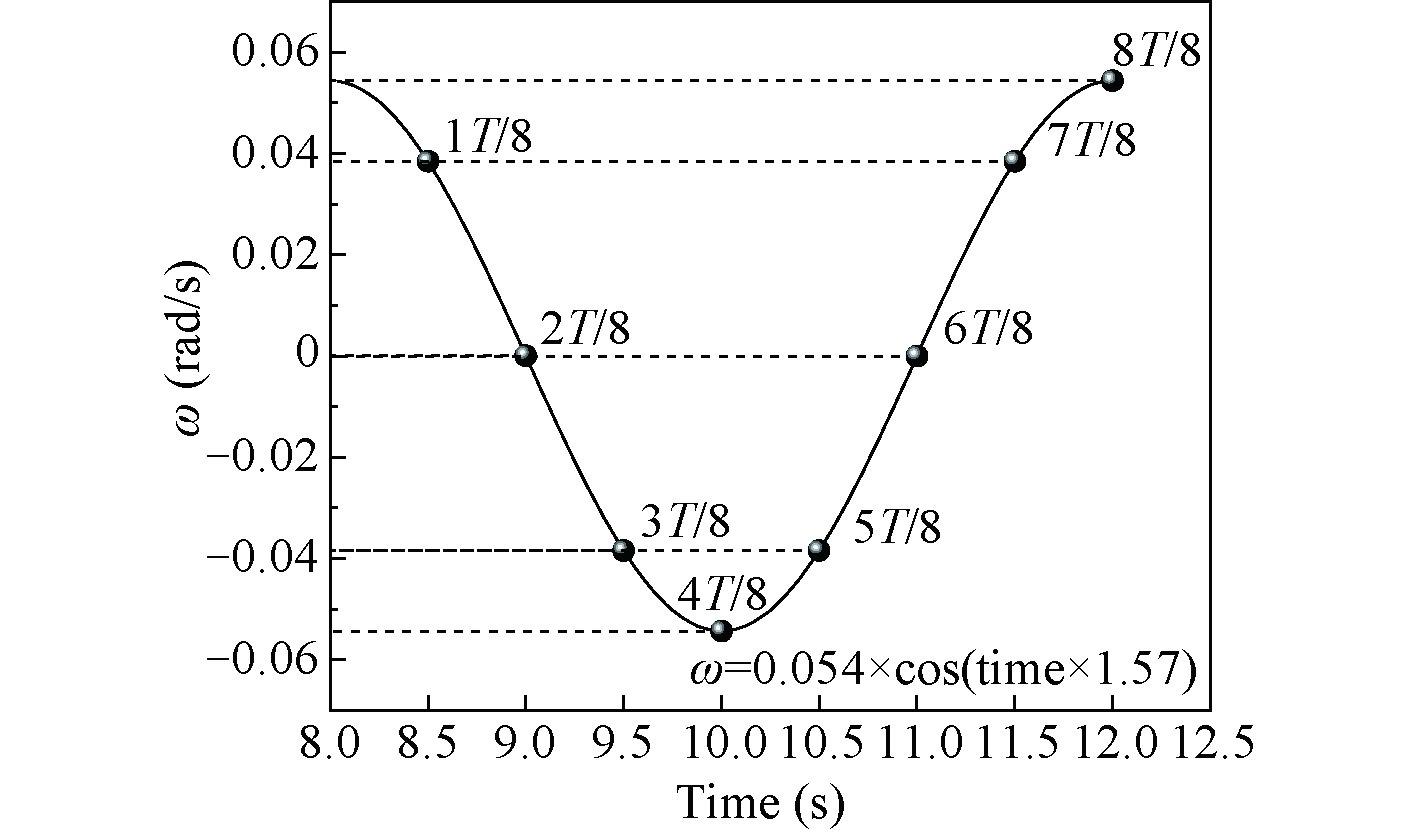
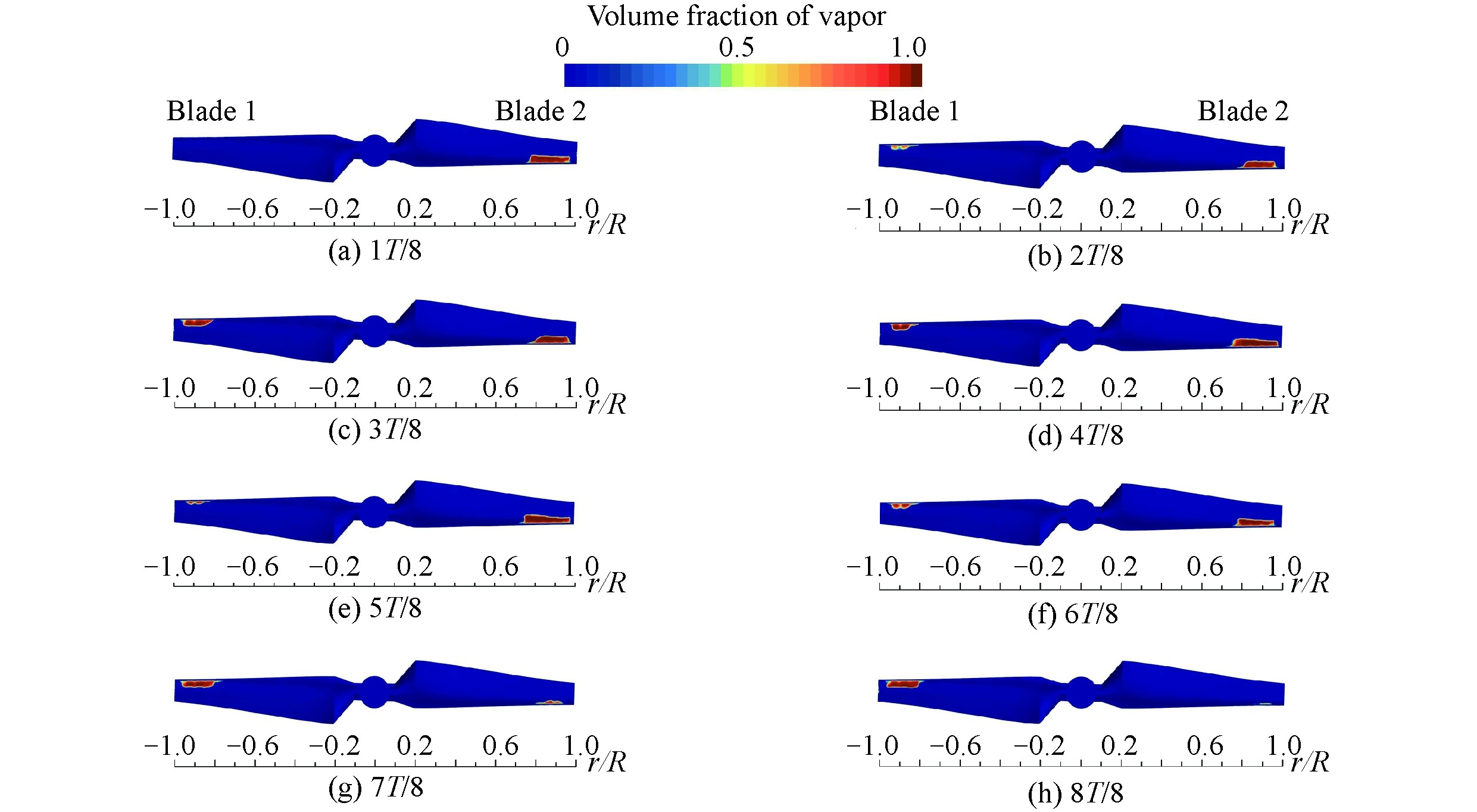
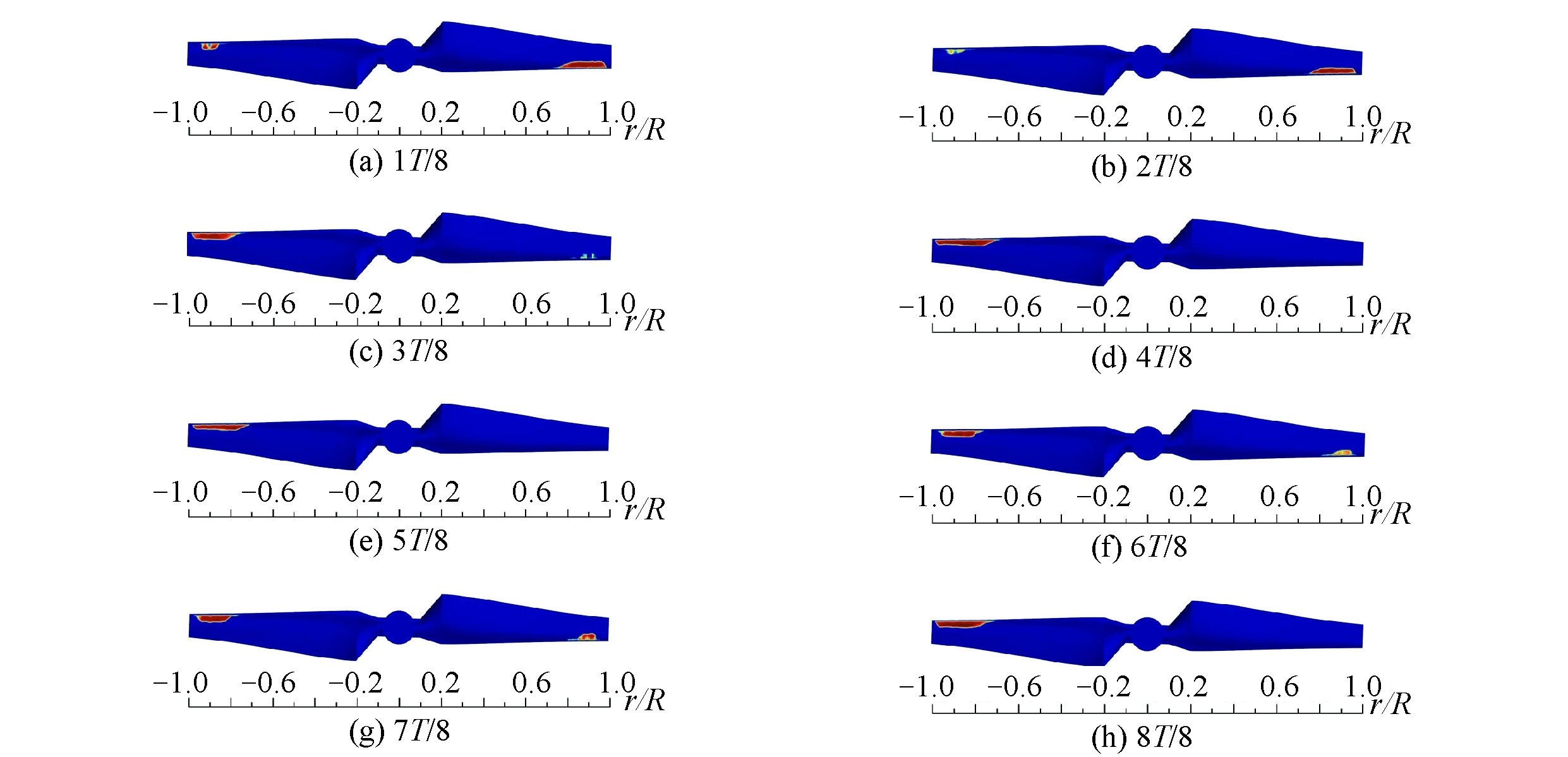
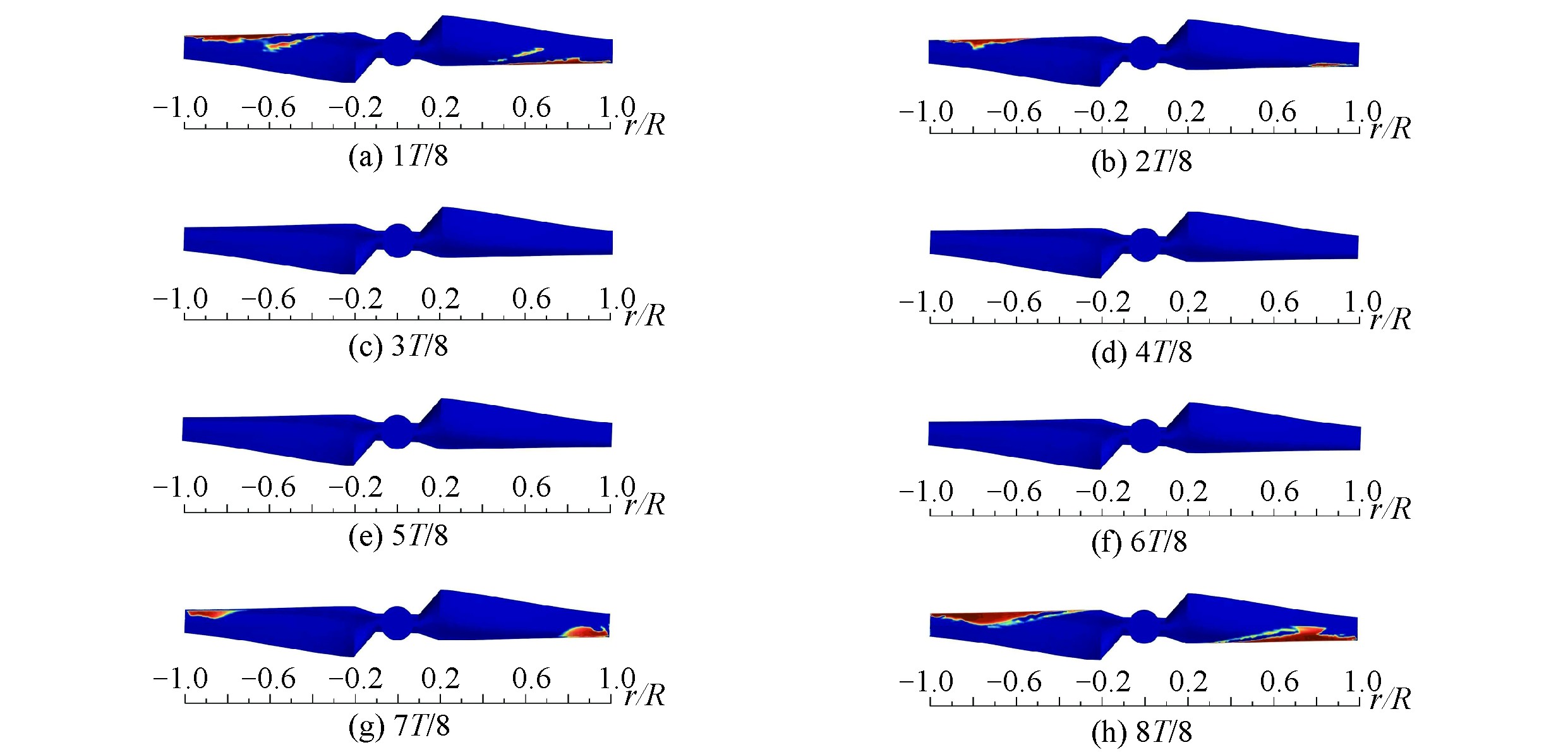
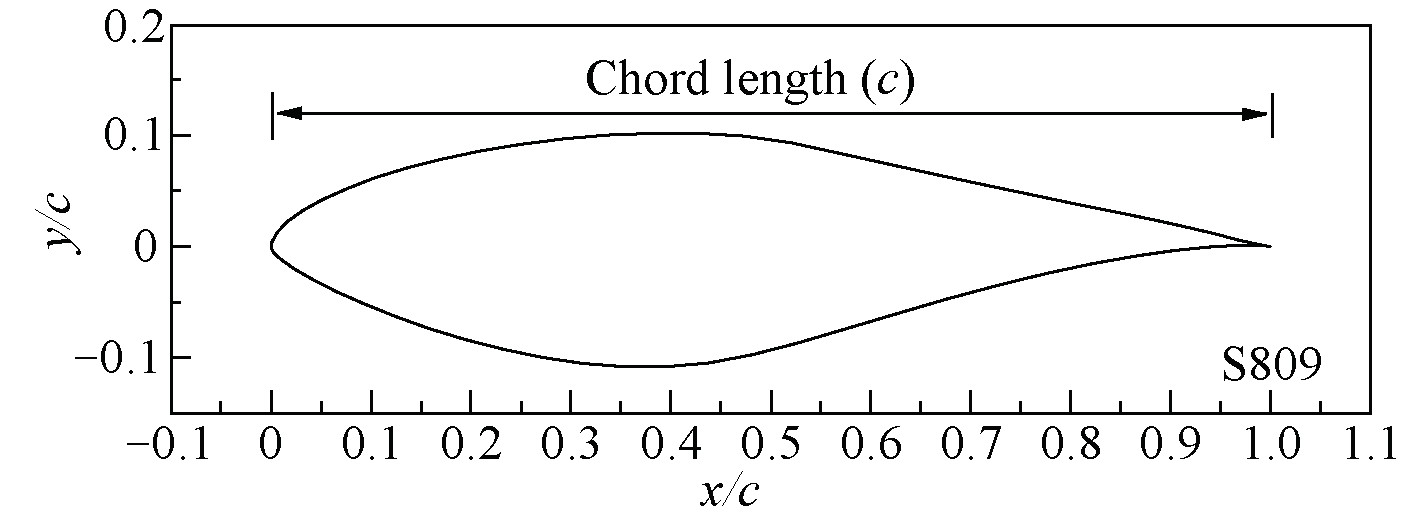
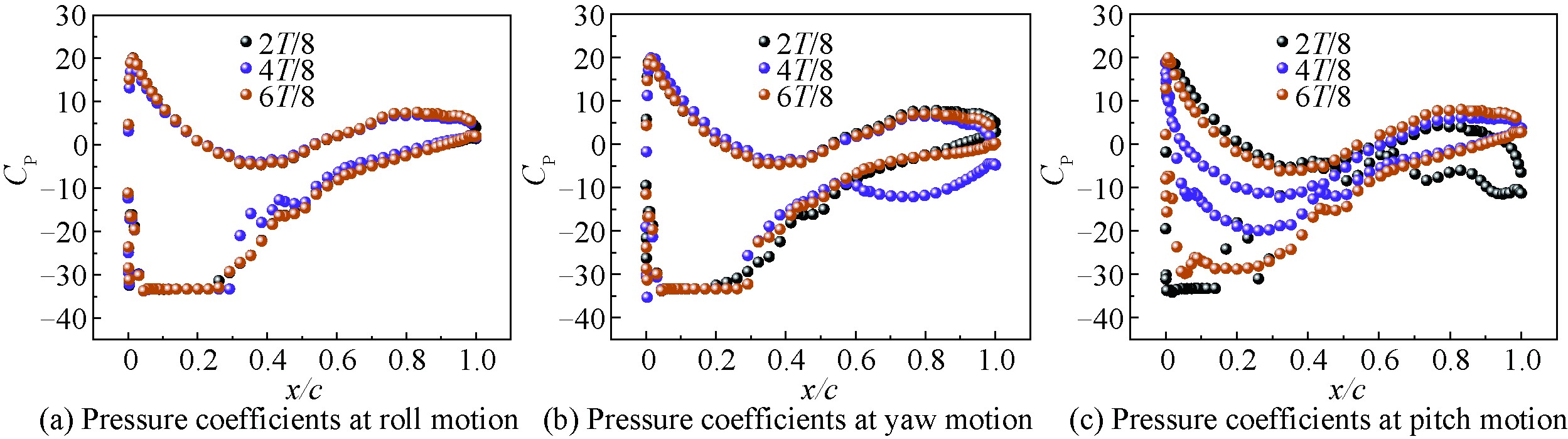
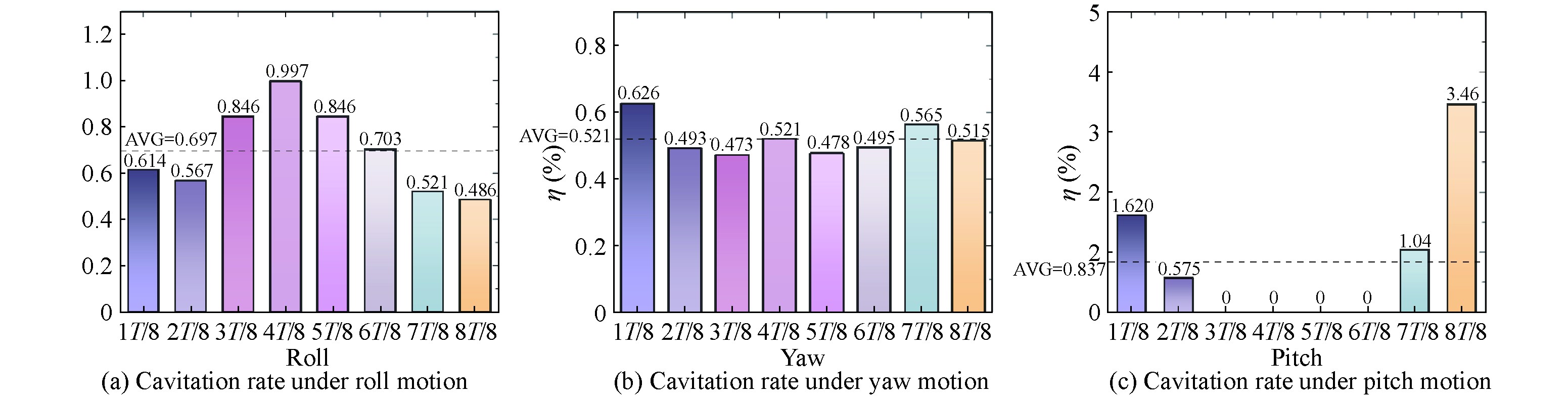
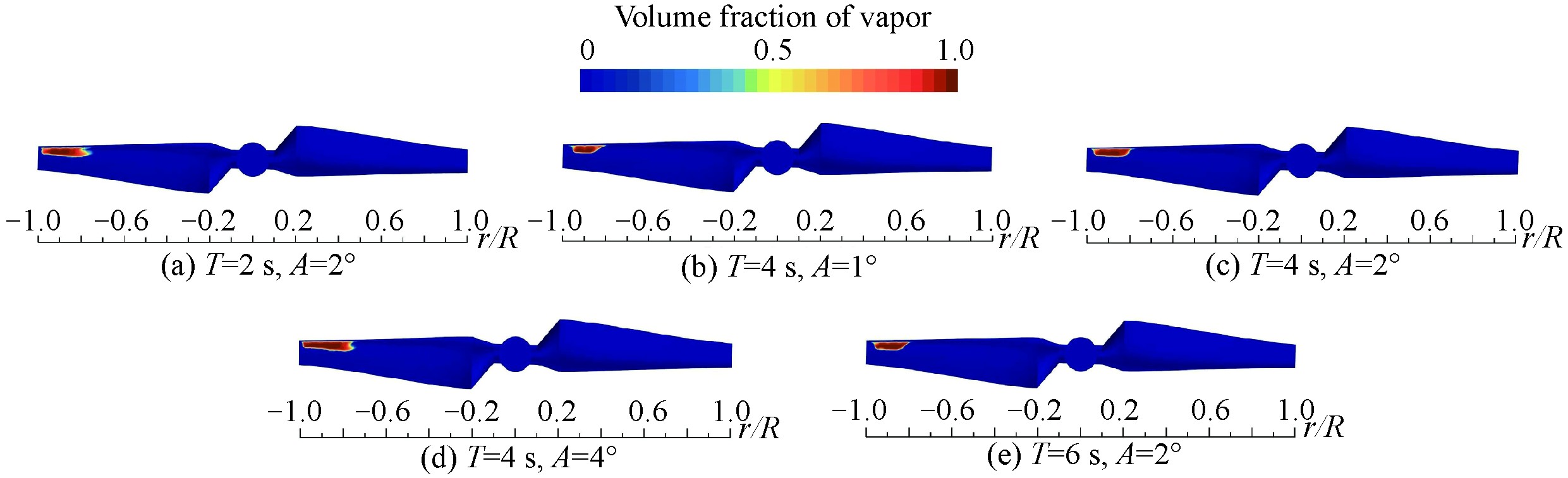
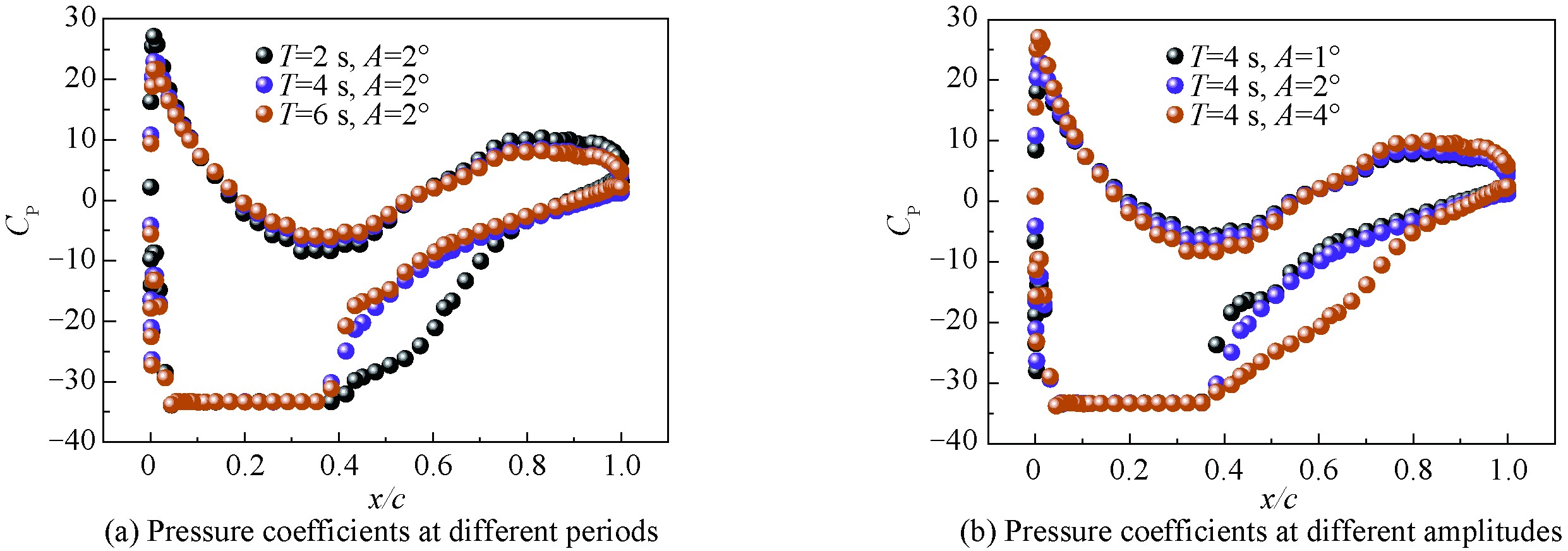
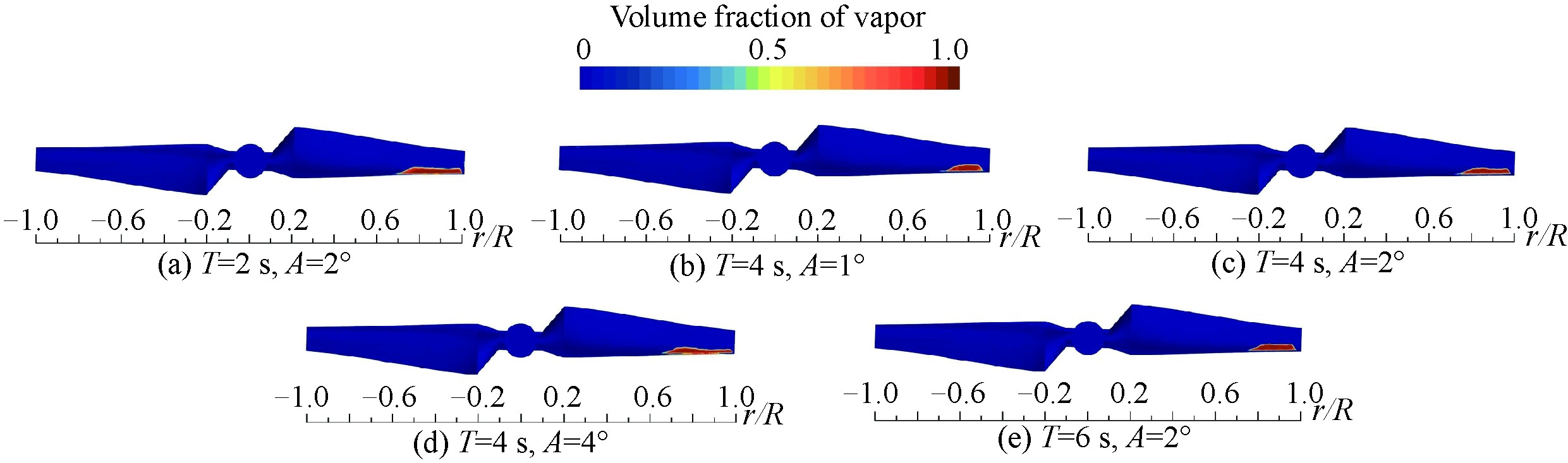
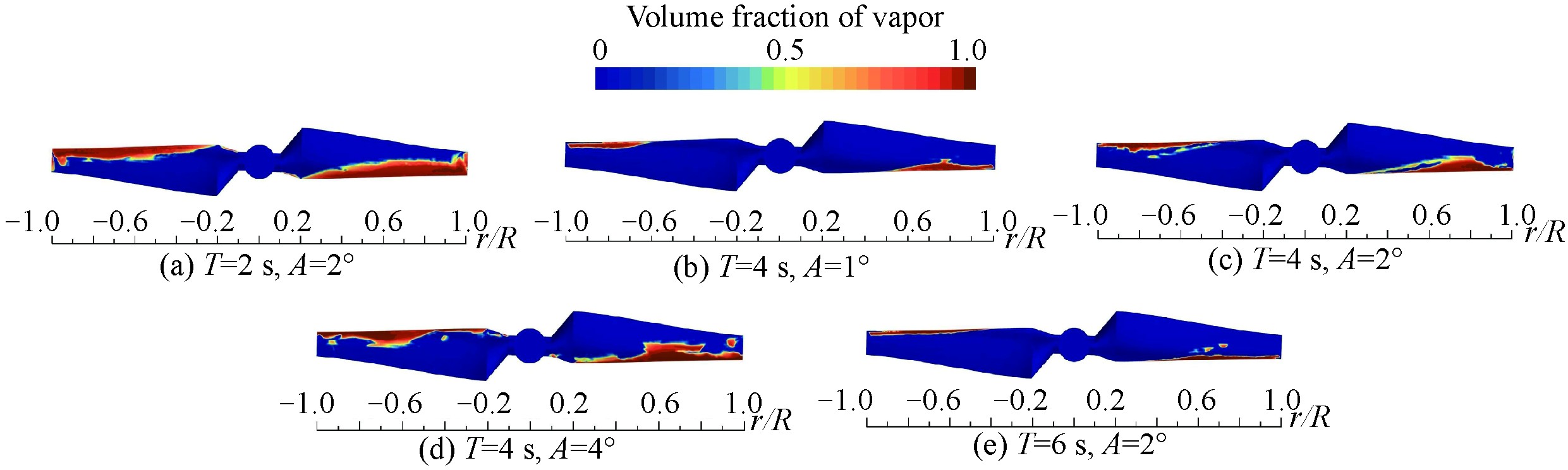
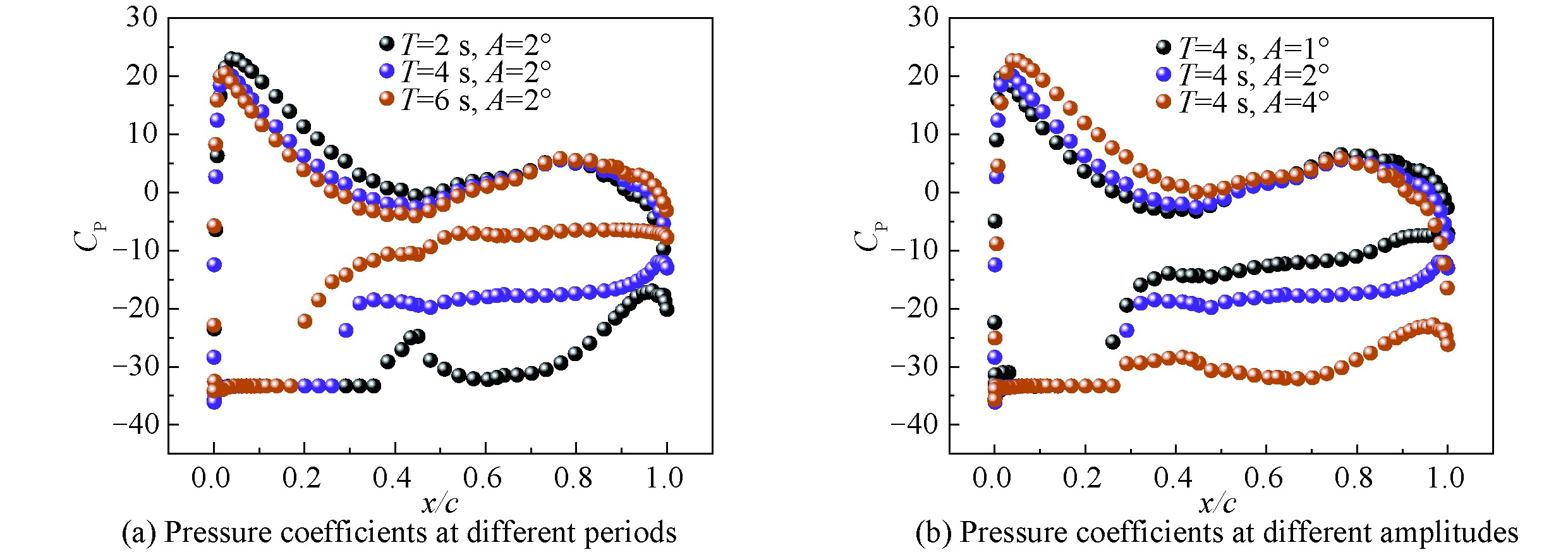
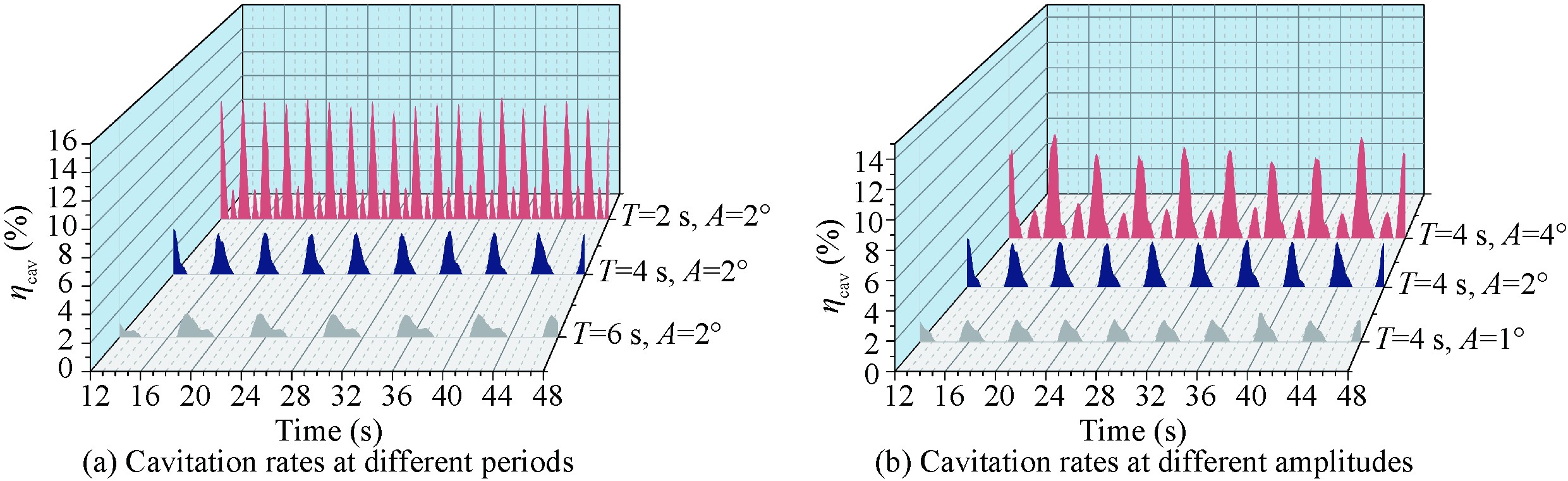
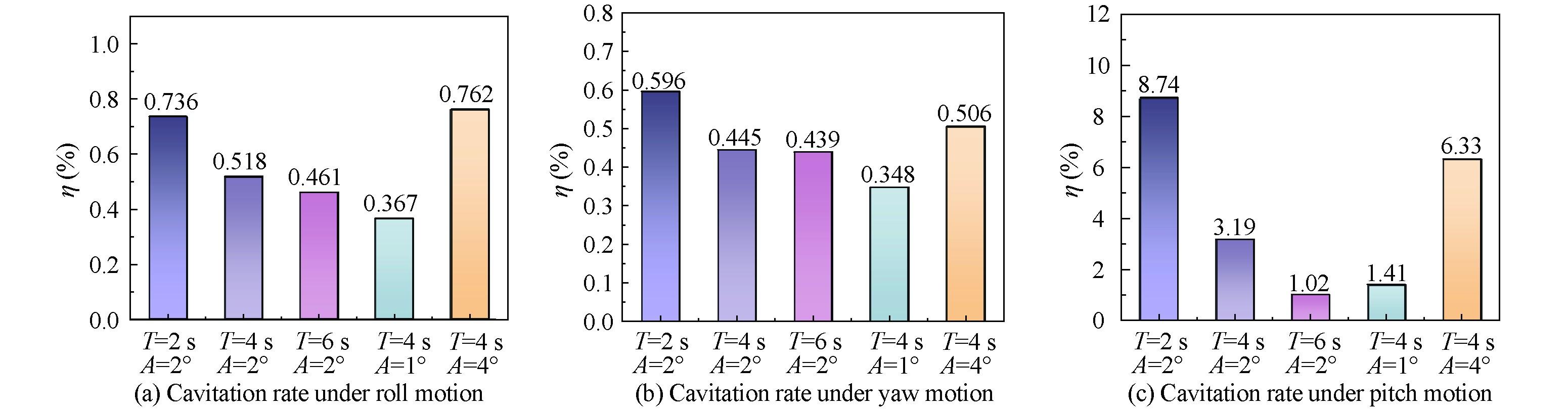
A floating horizontal-axis tidal current turbine (HATT) is an underwater power generation device where cavitation inevitably occurs on blade surfaces, severely affecting a turbine’s lifespan. Under wave action, these floating turbines exhibit six degrees of freedom motion, potentially intensifying the cavitation on the blade surfaces. This study selects three types of oscillatory motions from the six degrees of freedom: roll, yaw, and pitch. Computational fluid dynamics (CFD) methods are used for numerical calculations, and transient simulations of multiphase flow are conducted on the basis of the Reynolds-Averaged Navier-Stokes (RANS) model. Research has revealed strong correlations between flow velocity, the blade tip speed ratio, and cavitation. During oscillatory motion, the motion period and amplitude also significantly impact cavitation. In roll motion, the cavitation rate can increase by up to 59% with decreasing period, whereas in pitch and yaw motions, the increases are 7.57 times and 36% larger, respectively. With an increase in amplitude during roll motion, the cavitation rate can increase by up to 1.08 times, whereas in pitch and yaw motions, the increases are 3.49 times and 45%, respectively. The cavitation rate on the blade surfaces is the highest in pitch motion, followed by roll and yaw motions.
A floating horizontal-axis tidal current turbine (HATT) is an underwater power generation device where cavitation inevitably occurs on blade surfaces, severely affecting a turbine’s lifespan. Under wave action, these floating turbines exhibit six degrees of freedom motion, potentially intensifying the cavitation on the blade surfaces. This study selects three types of oscillatory motions from the six degrees of freedom: roll, yaw, and pitch. Computational fluid dynamics (CFD) methods are used for numerical calculations, and transient simulations of multiphase flow are conducted on the basis of the Reynolds-Averaged Navier-Stokes (RANS) model. Research has revealed strong correlations between flow velocity, the blade tip speed ratio, and cavitation. During oscillatory motion, the motion period and amplitude also significantly impact cavitation. In roll motion, the cavitation rate can increase by up to 59% with decreasing period, whereas in pitch and yaw motions, the increases are 7.57 times and 36% larger, respectively. With an increase in amplitude during roll motion, the cavitation rate can increase by up to 1.08 times, whereas in pitch and yaw motions, the increases are 3.49 times and 45%, respectively. The cavitation rate on the blade surfaces is the highest in pitch motion, followed by roll and yaw motions.


2025, 39(2)
:316-328.
doi: 10.1007/s13344-025-0023-8
Abstract:
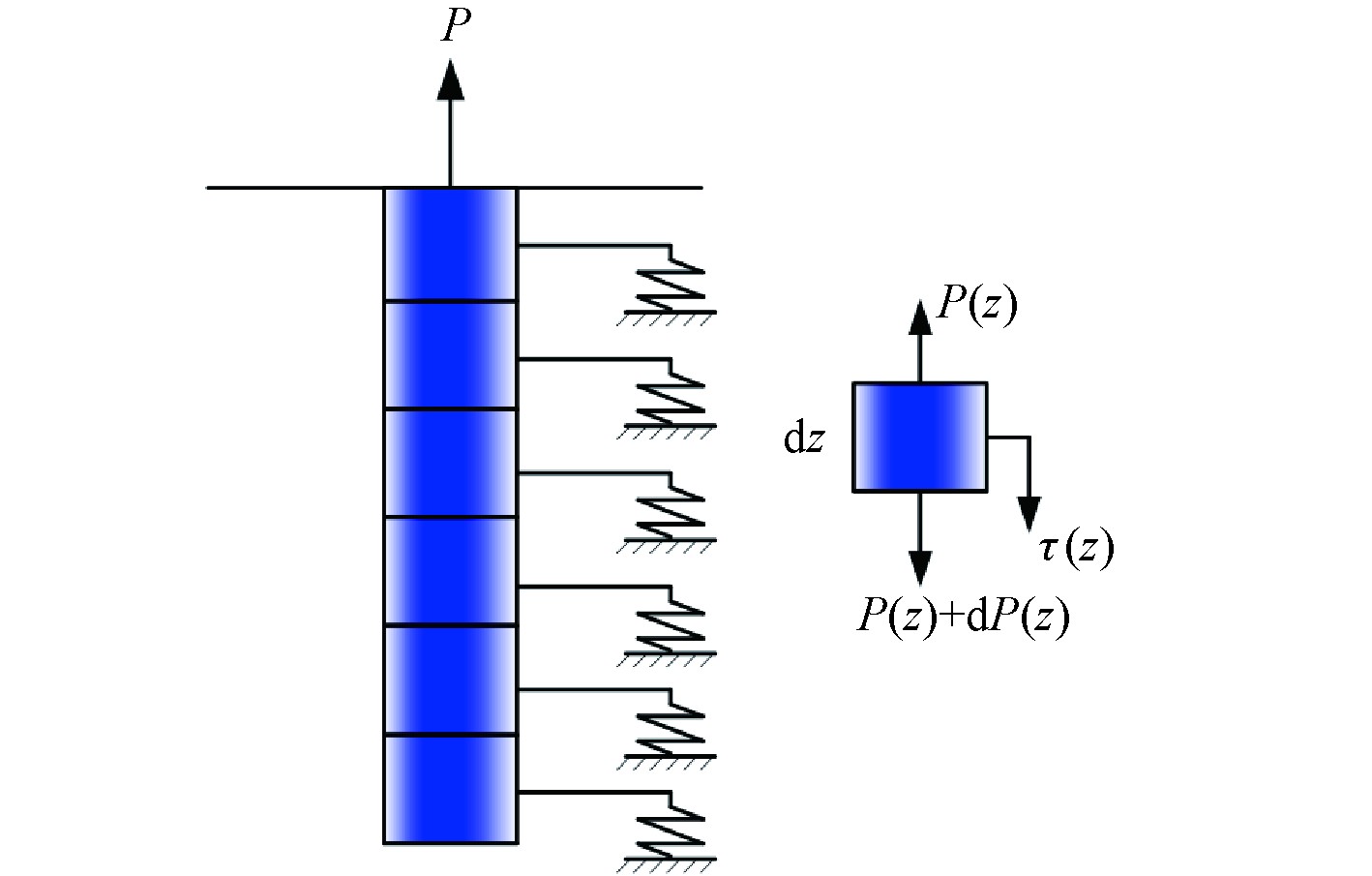
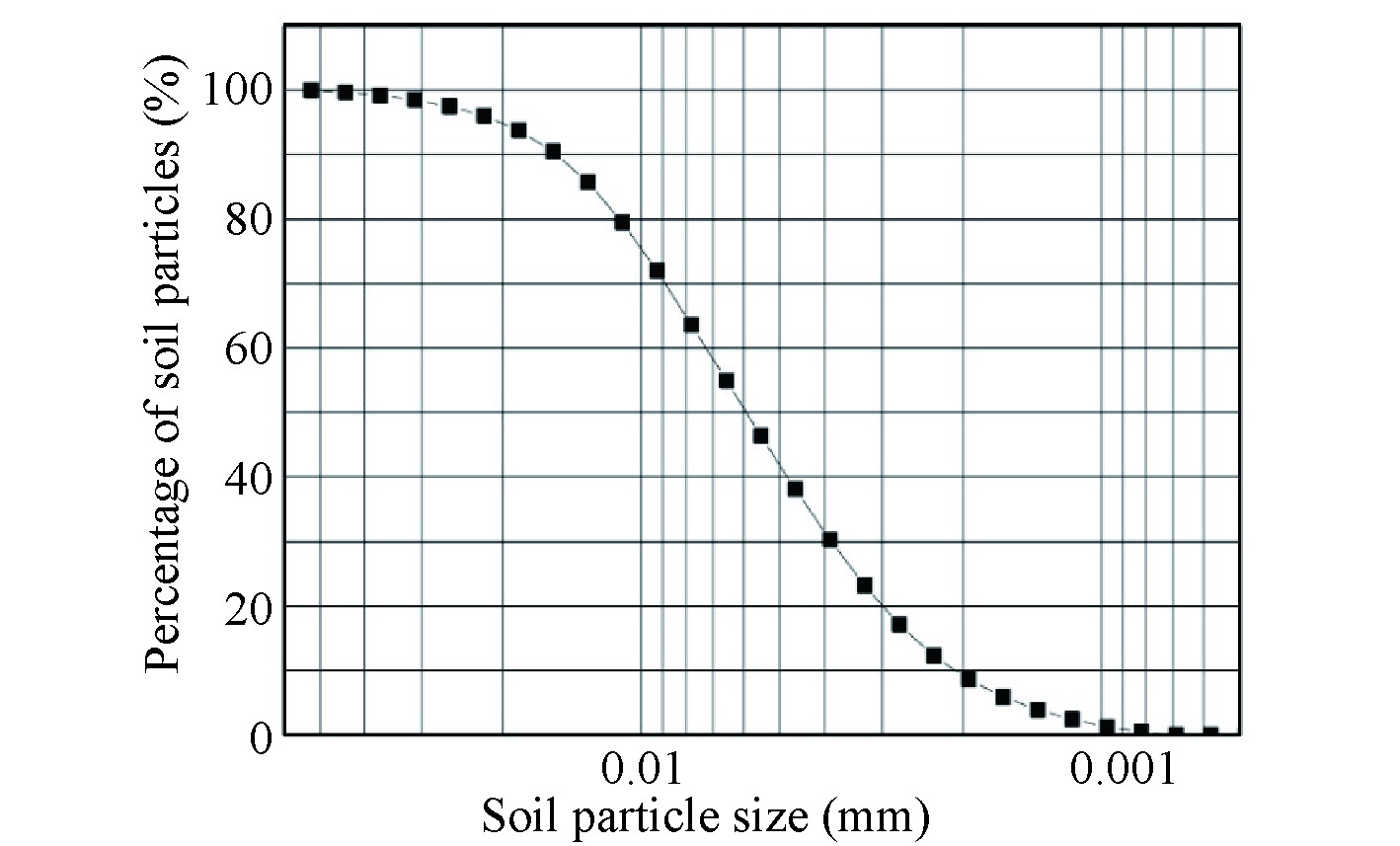
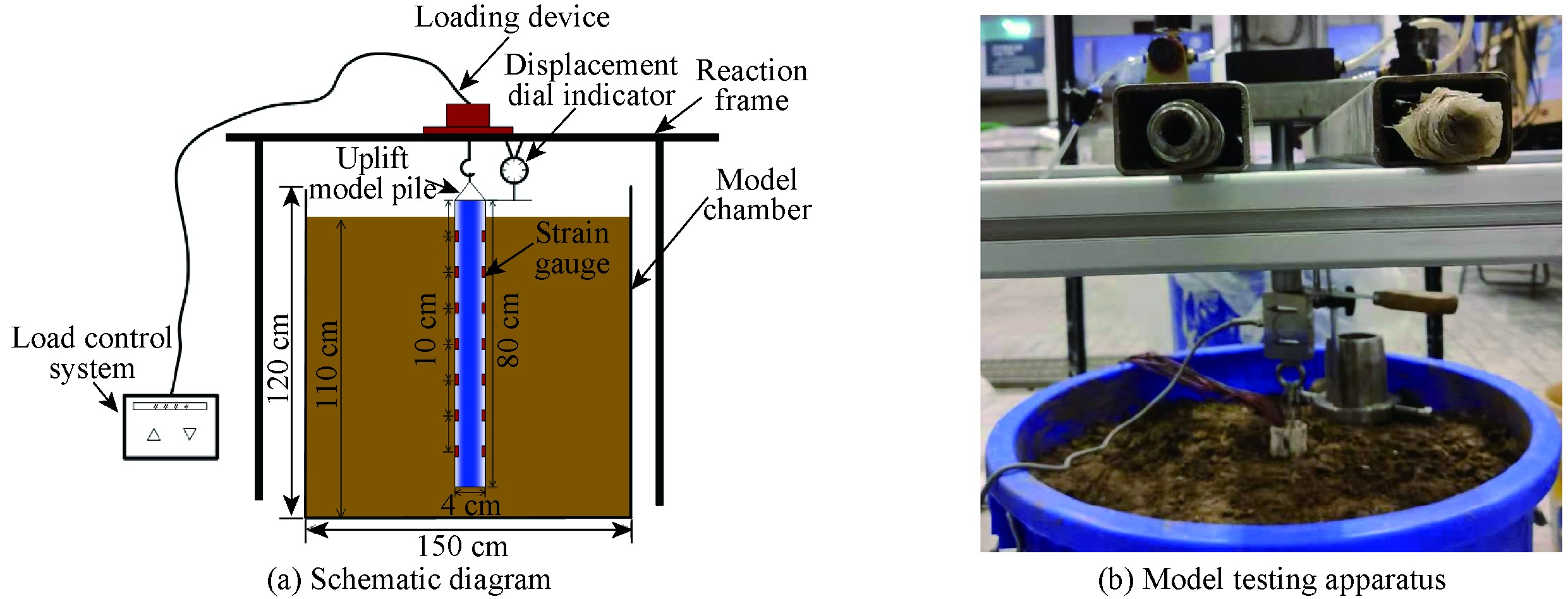
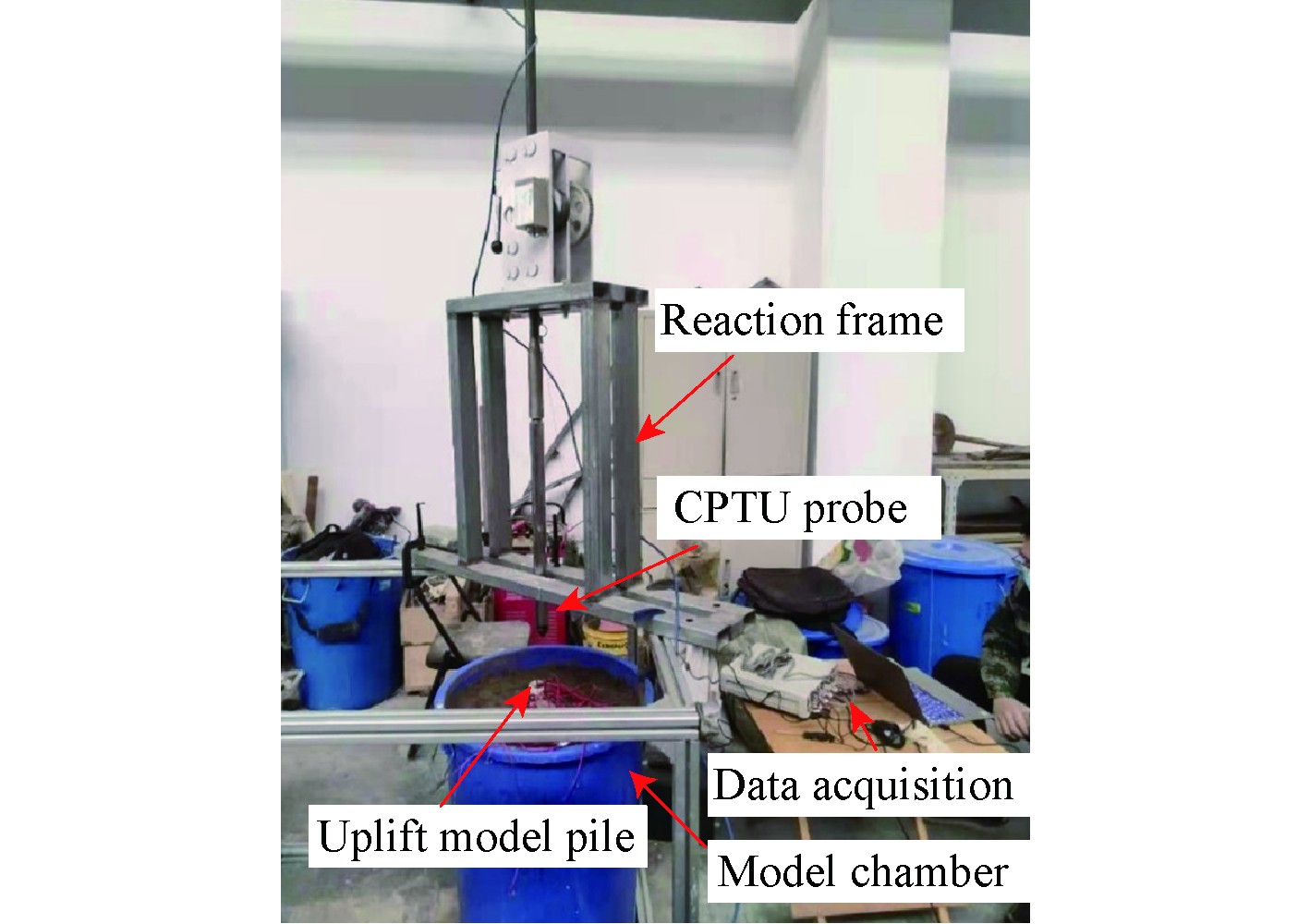
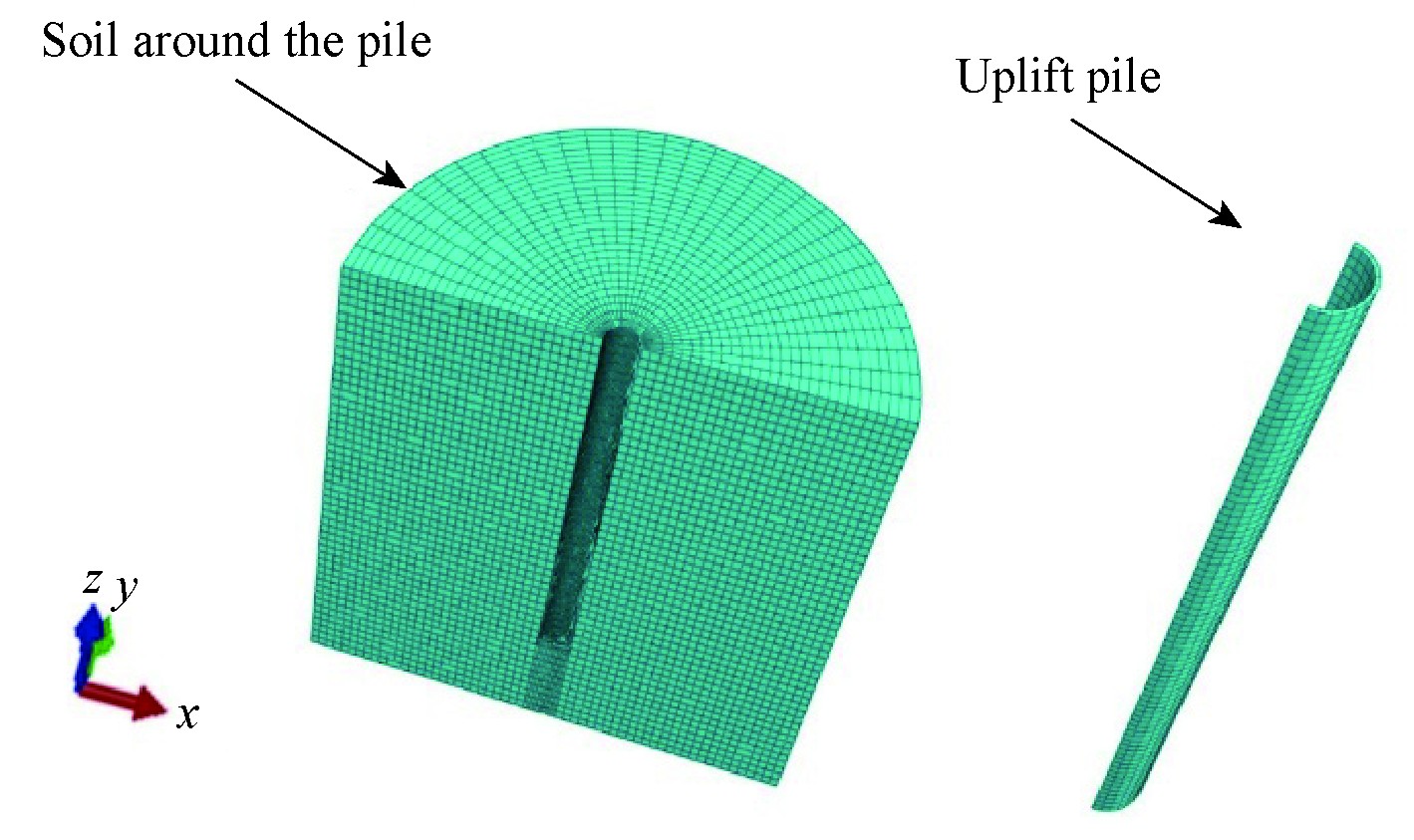
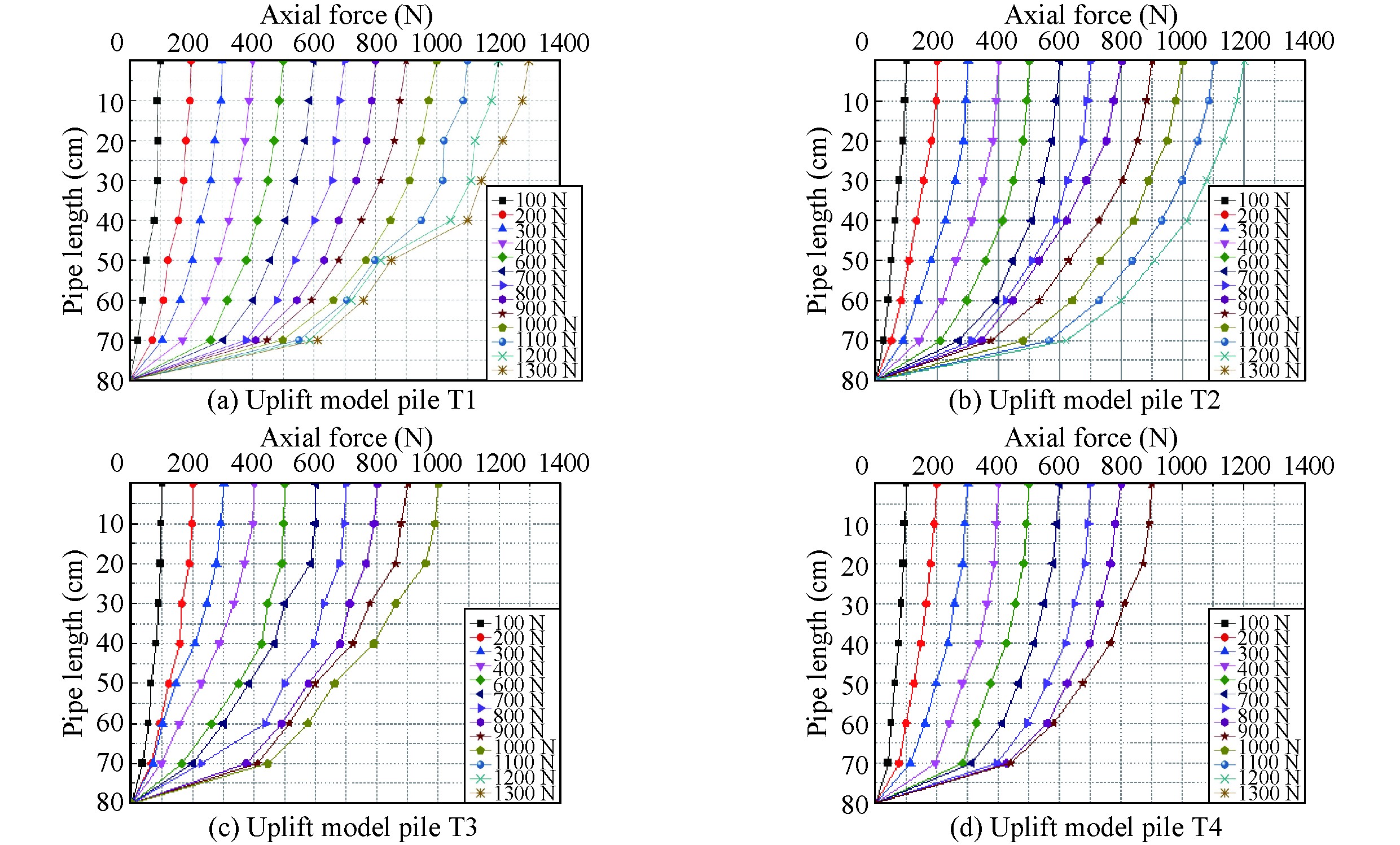
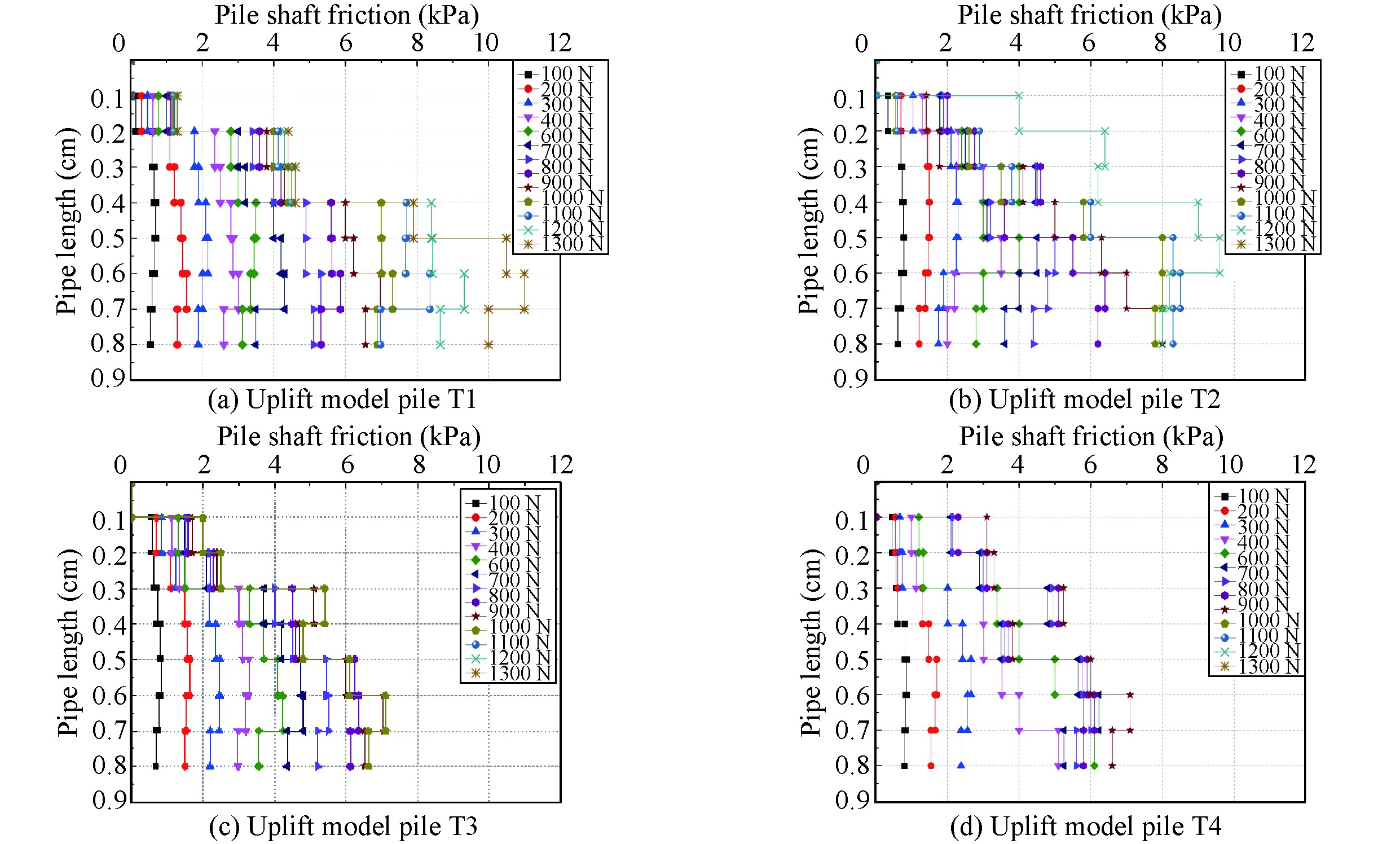
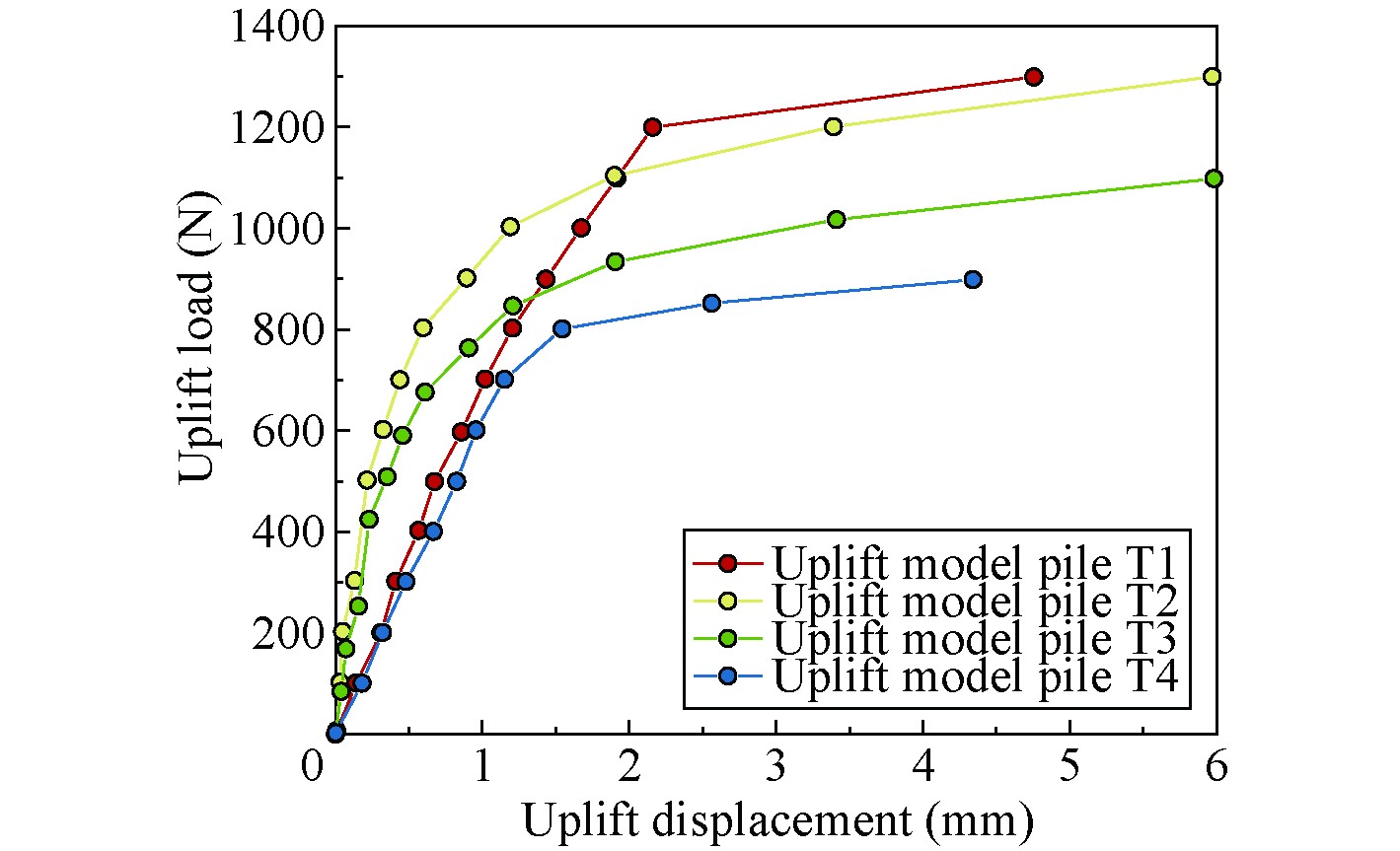
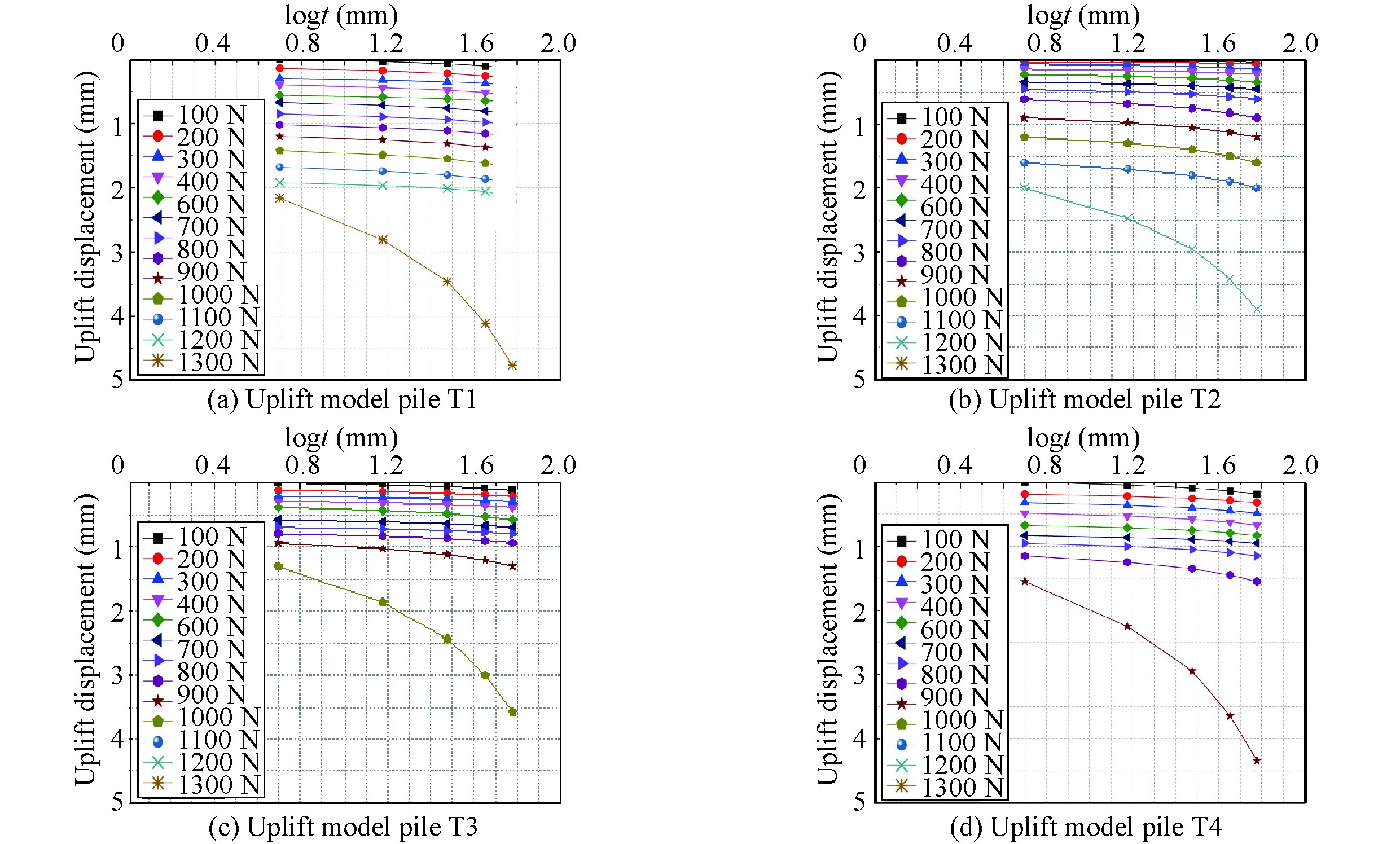
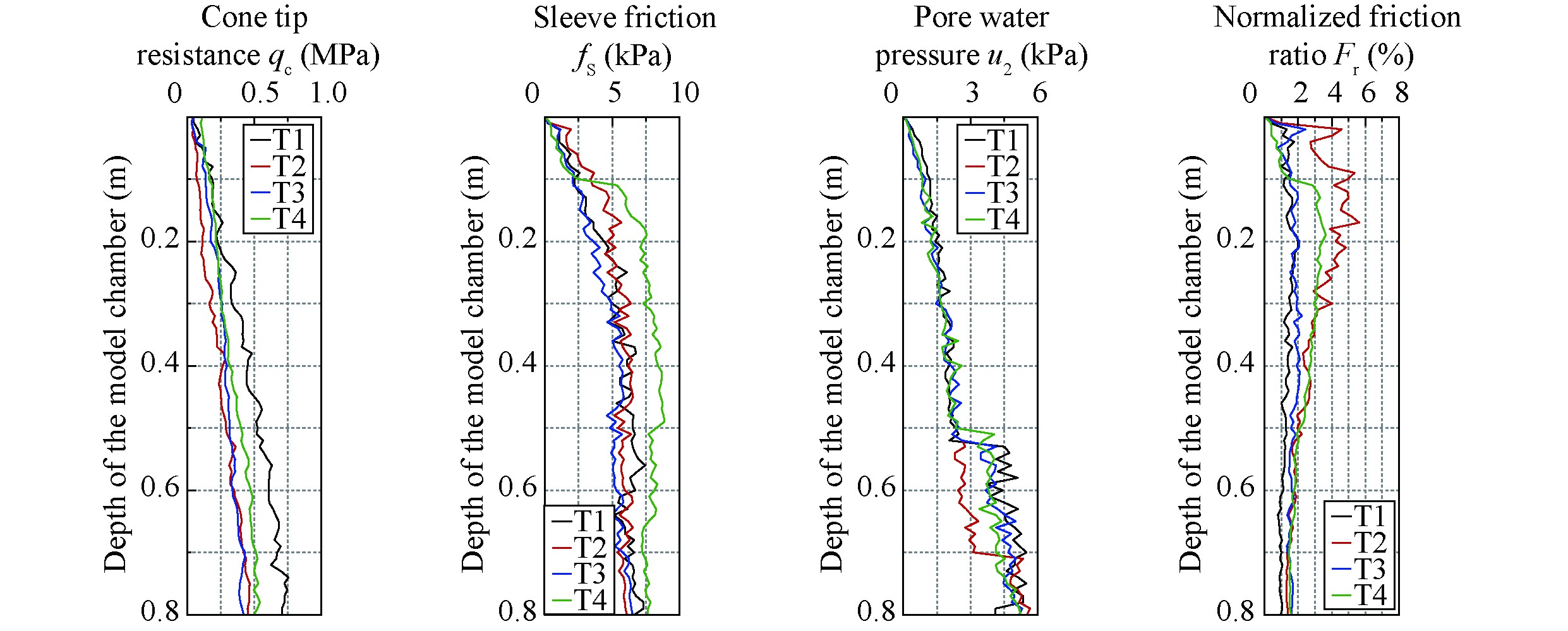
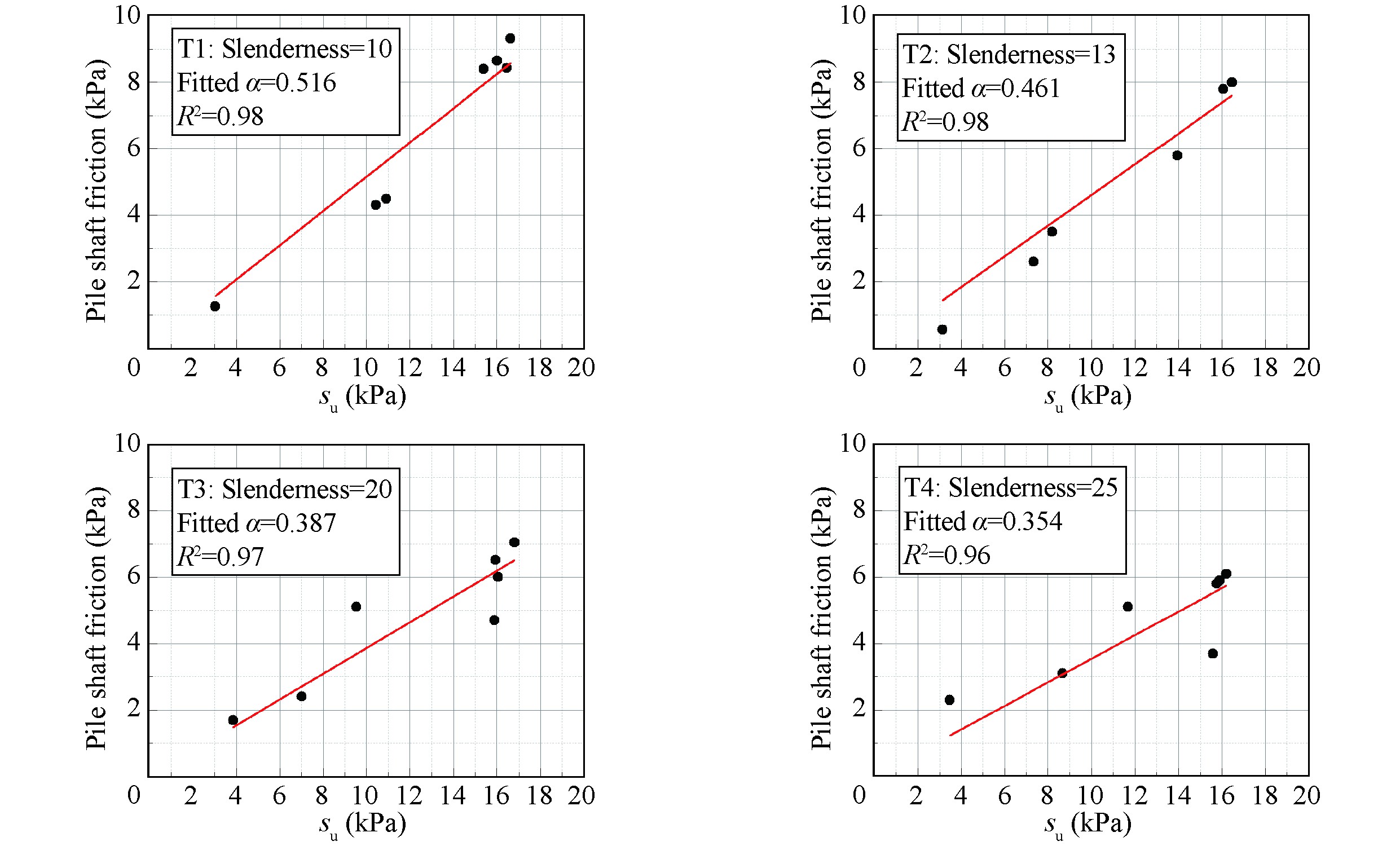
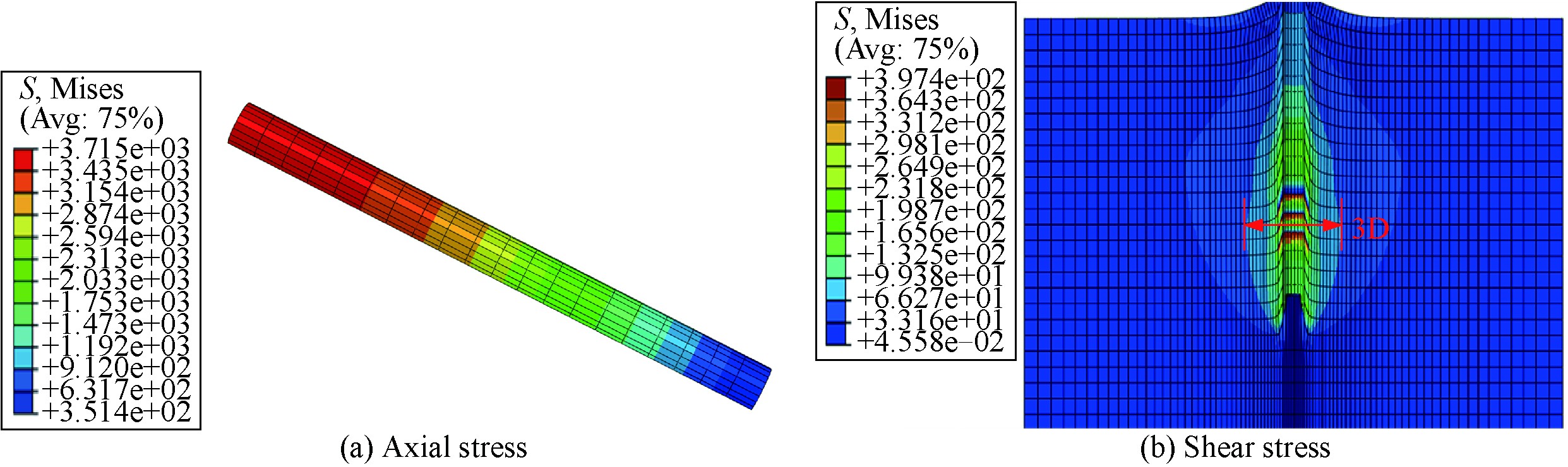
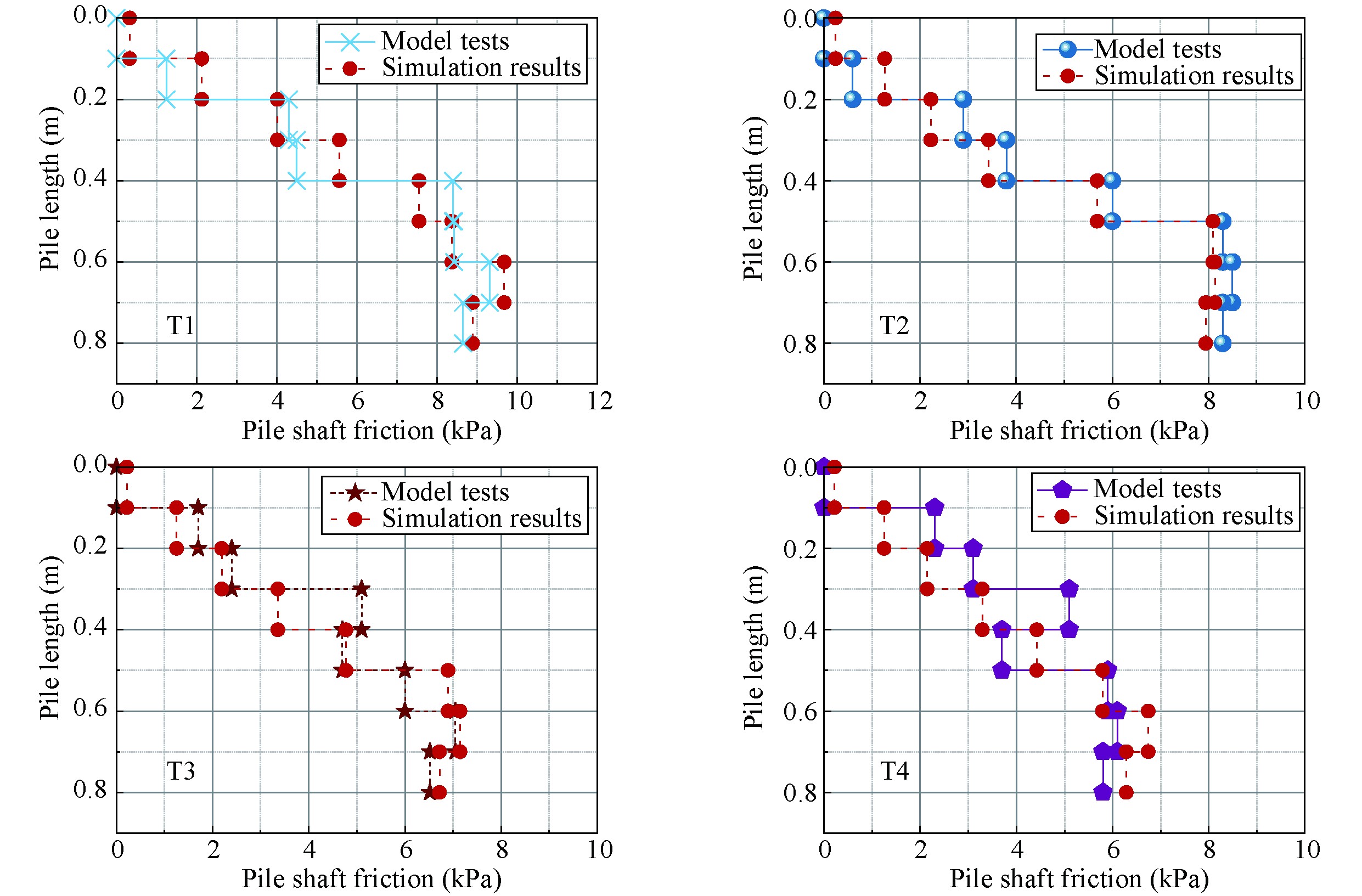
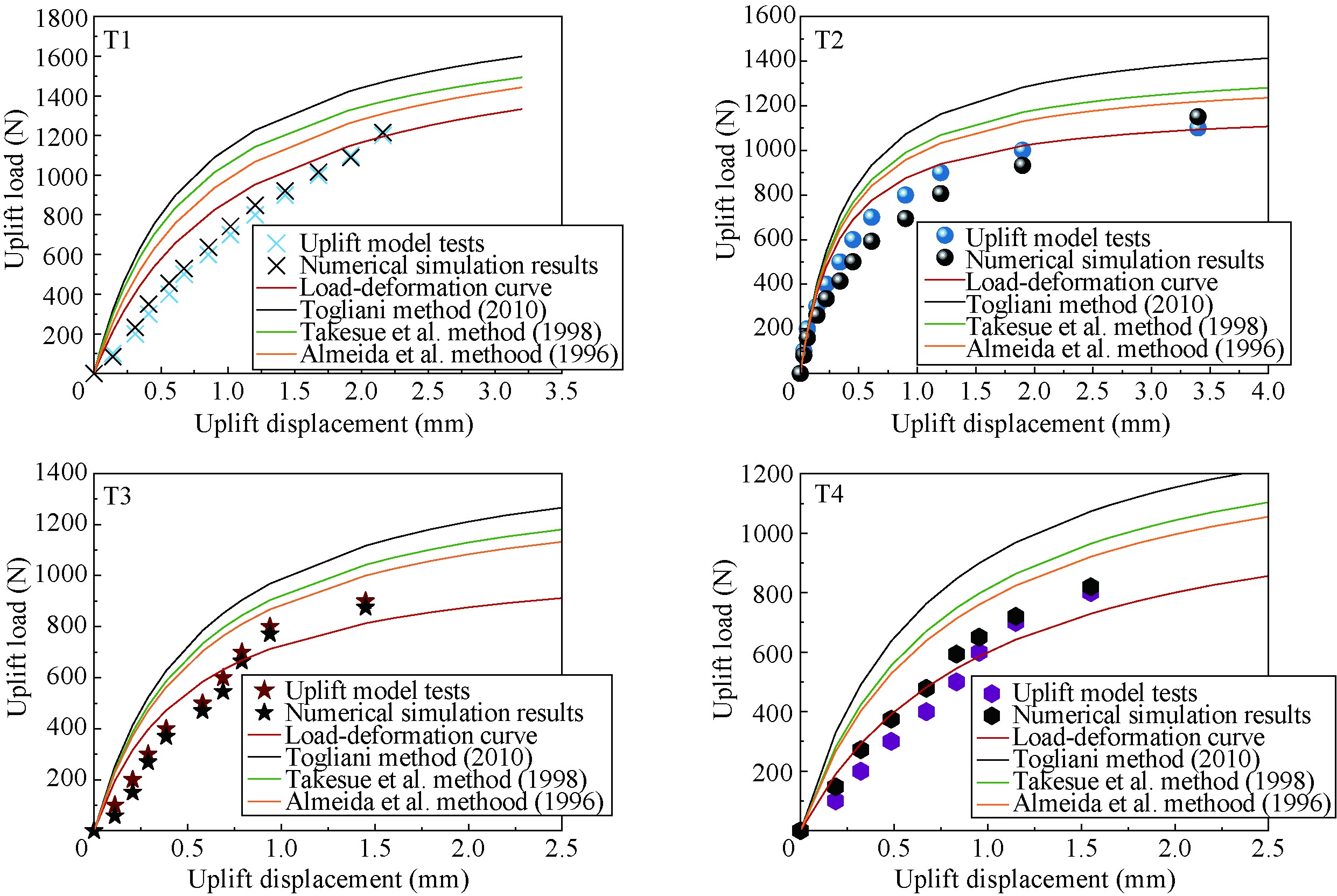
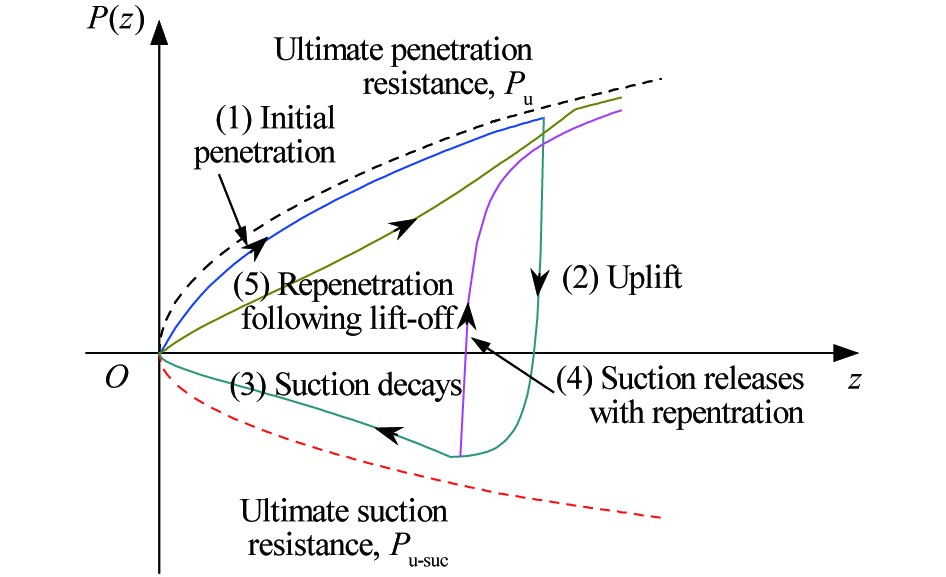
With the increasing construction of port facilities, cross-sea bridges, and offshore engineering projects, uplift piles embedded in marine sedimentary soft soil are becoming increasingly necessary. The load-displacement curve of uplift piles is crucial for evaluating their uplift bearing characteristics, which facilitates the risk evaluation, design, and construction of large infrastructural supports. In this study, a load-displacement curve model based on piezocone penetration test (CPTU) data is proposed via the load transfer method. Experimental tests are conducted to analyze the uplift bearing characteristics and establish a correlation between the proposed model and CPTU data. The results of the proposed load-displacement curve are compared with the results from numerical simulations and those calculated by previous methods. The results show that the proposed curves appropriately evaluated the uplift bearing characteristics and improved the accuracy in comparison with previous methods.
With the increasing construction of port facilities, cross-sea bridges, and offshore engineering projects, uplift piles embedded in marine sedimentary soft soil are becoming increasingly necessary. The load-displacement curve of uplift piles is crucial for evaluating their uplift bearing characteristics, which facilitates the risk evaluation, design, and construction of large infrastructural supports. In this study, a load-displacement curve model based on piezocone penetration test (CPTU) data is proposed via the load transfer method. Experimental tests are conducted to analyze the uplift bearing characteristics and establish a correlation between the proposed model and CPTU data. The results of the proposed load-displacement curve are compared with the results from numerical simulations and those calculated by previous methods. The results show that the proposed curves appropriately evaluated the uplift bearing characteristics and improved the accuracy in comparison with previous methods.
2025, 39(2)
:329-339.
doi: 10.1007/s13344-025-0025-6
Abstract:
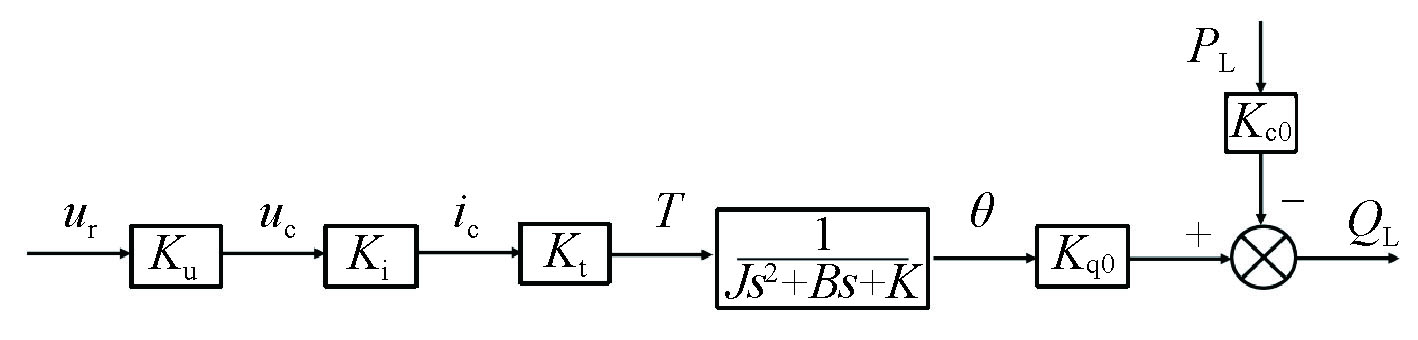
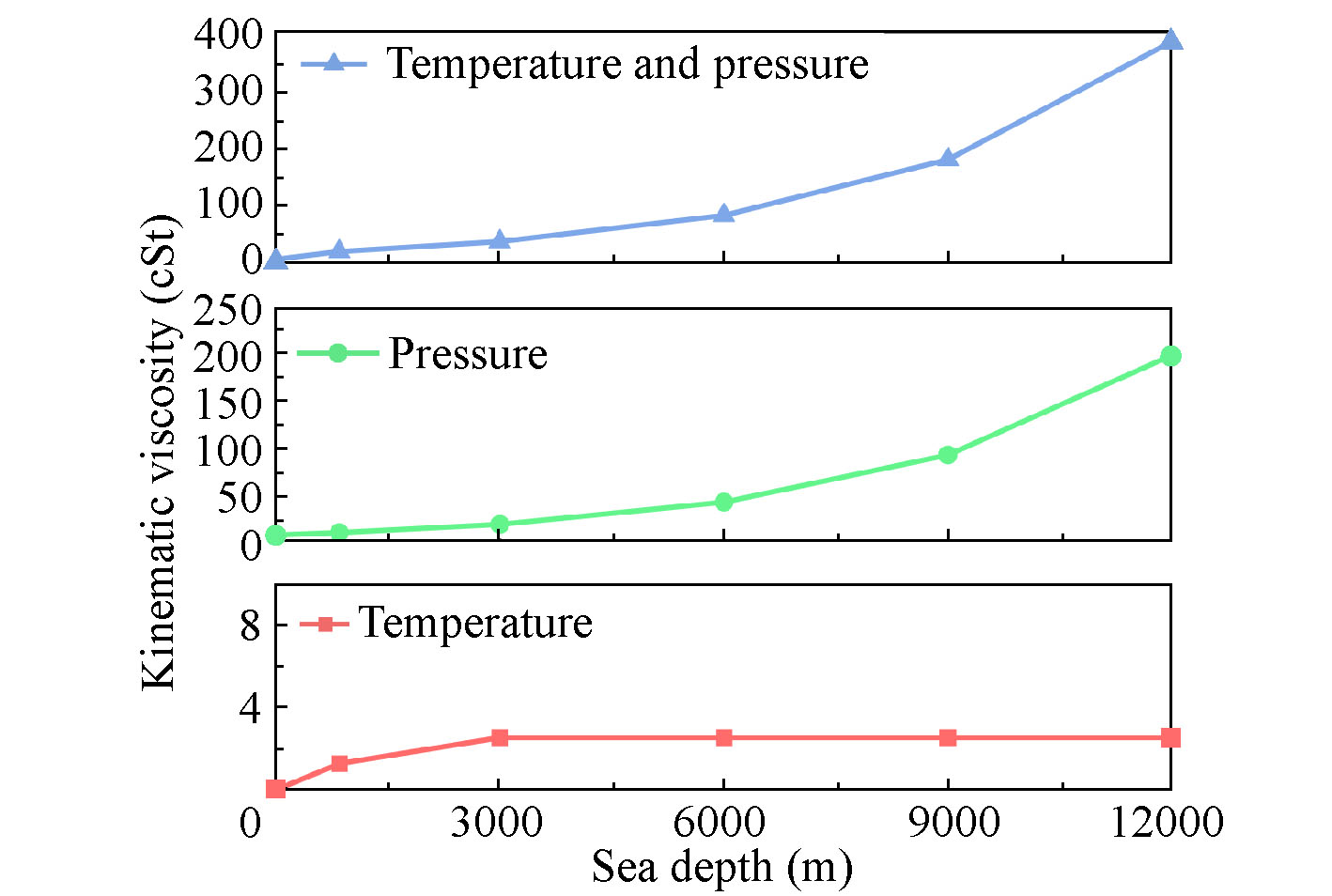
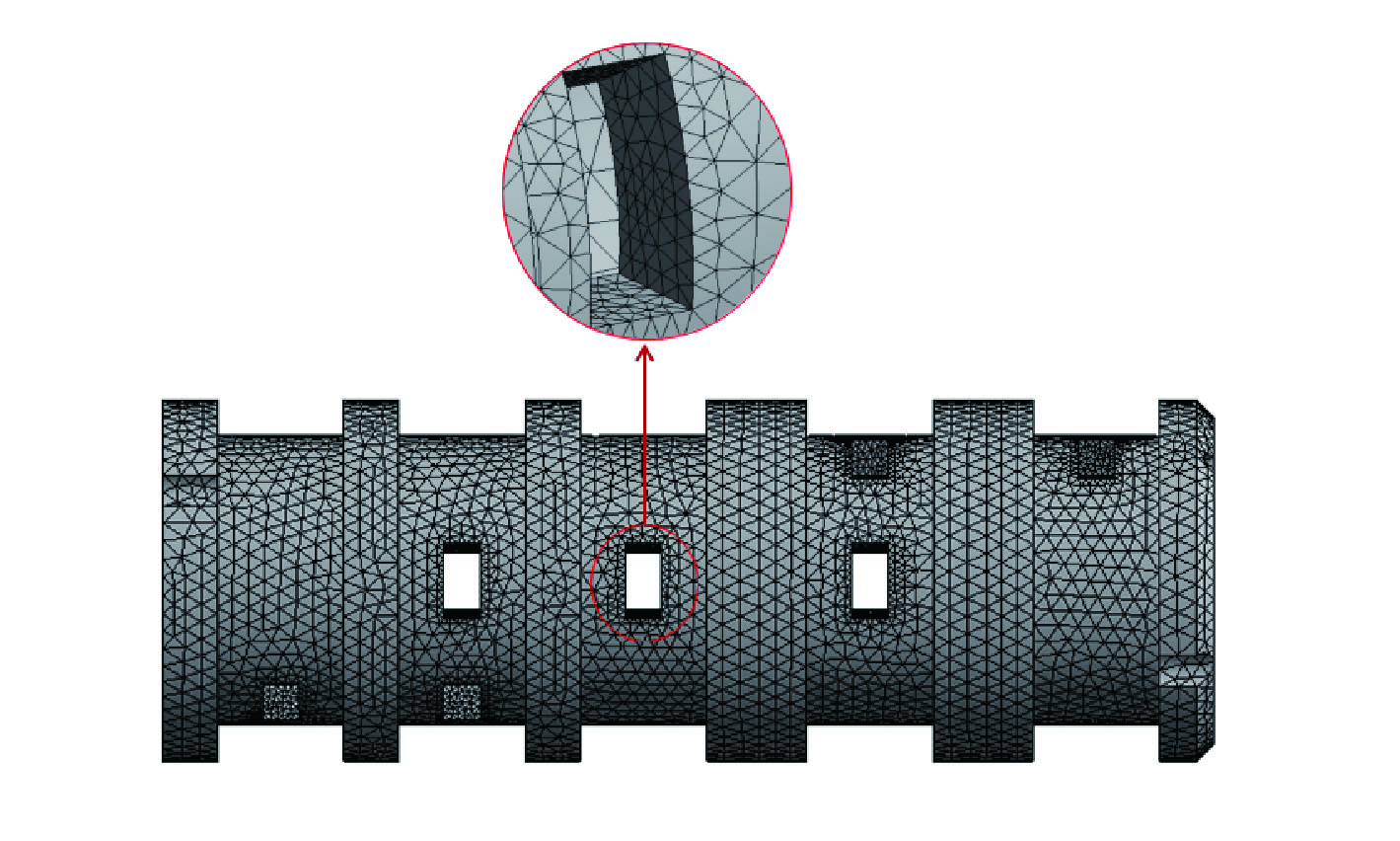
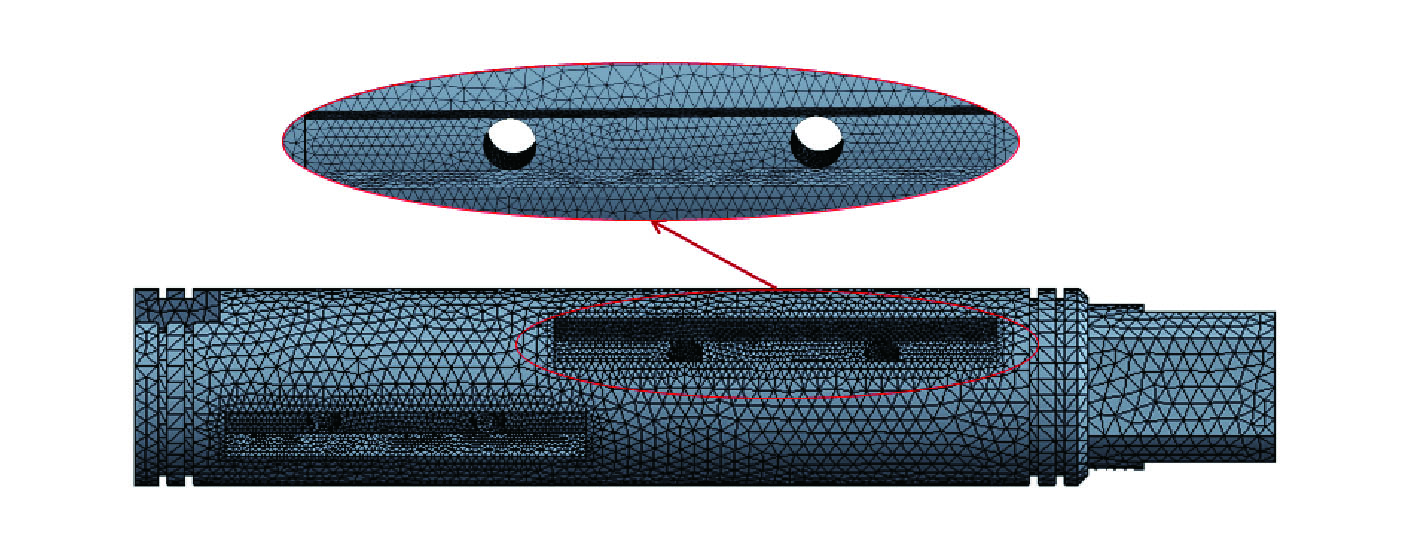
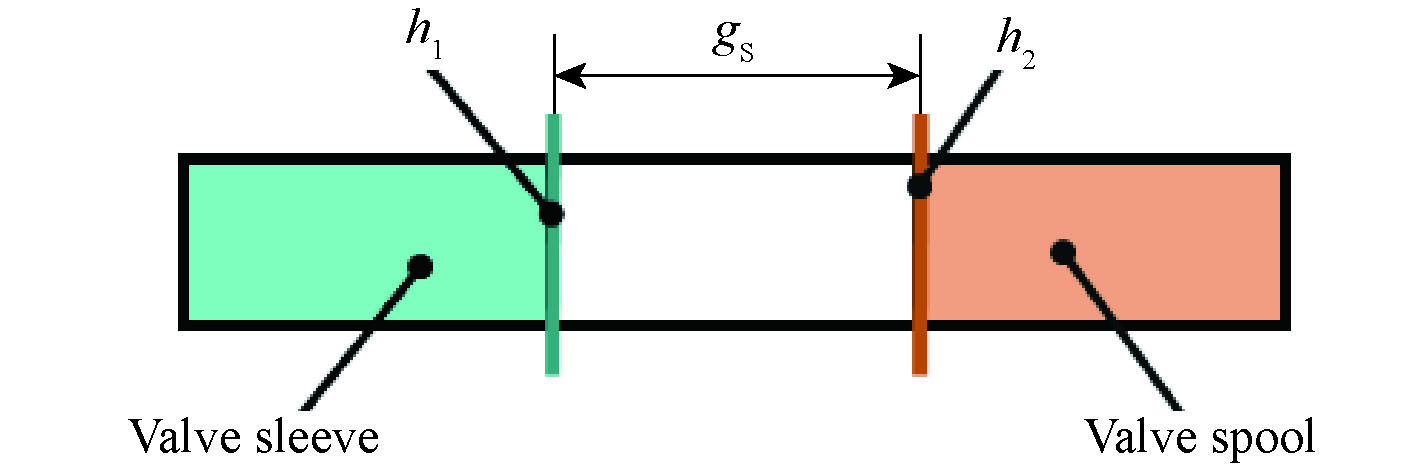
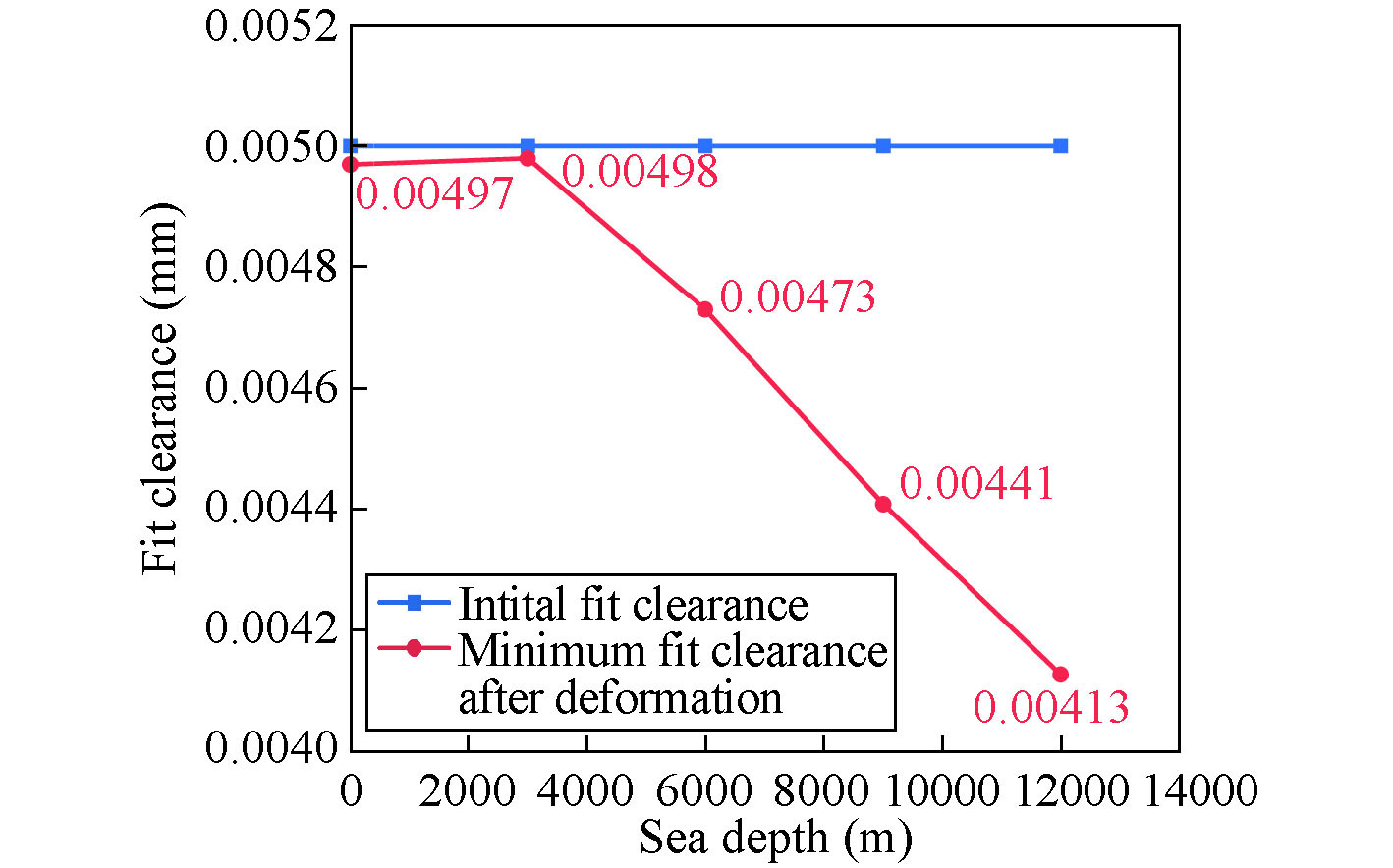
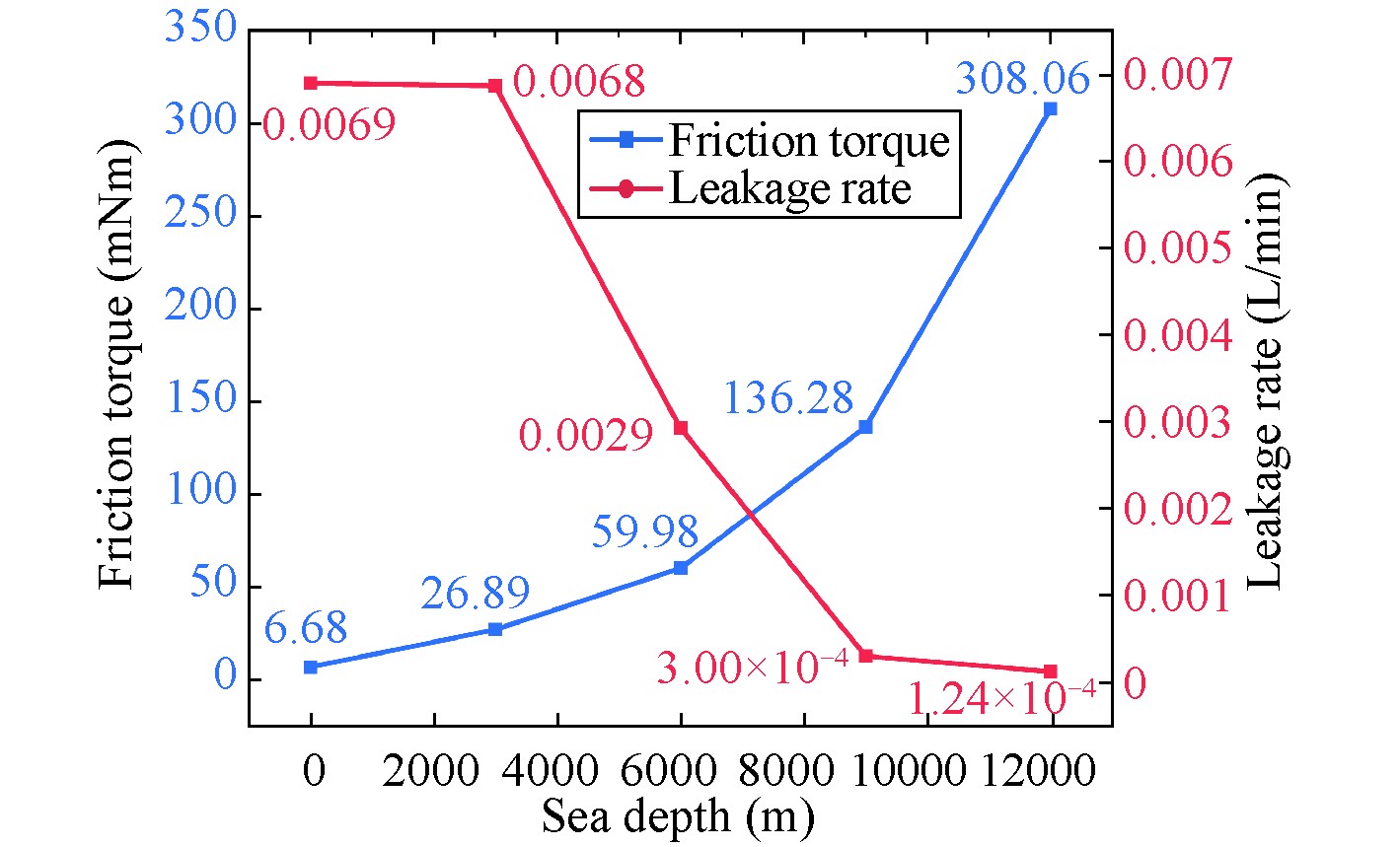
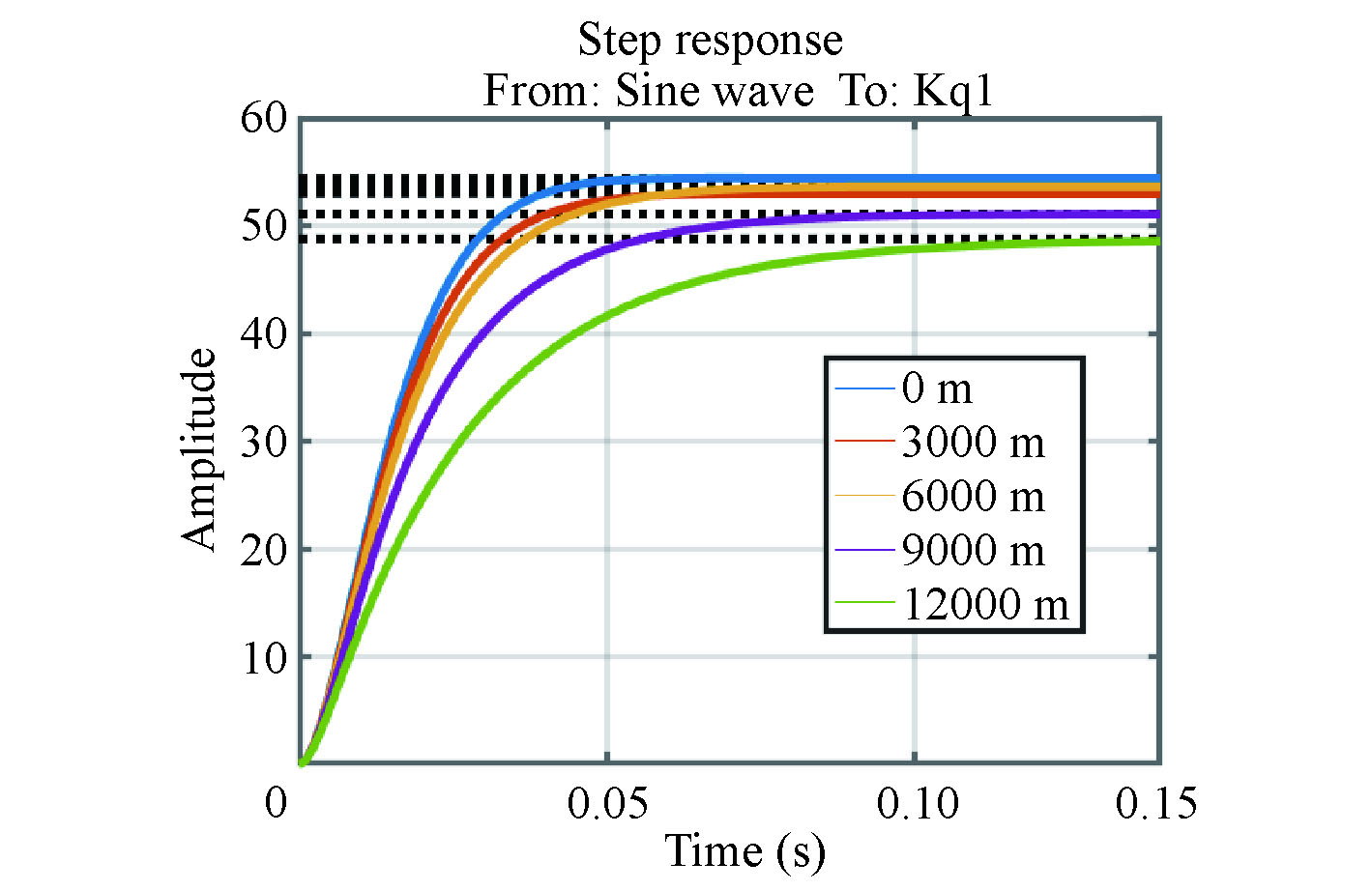
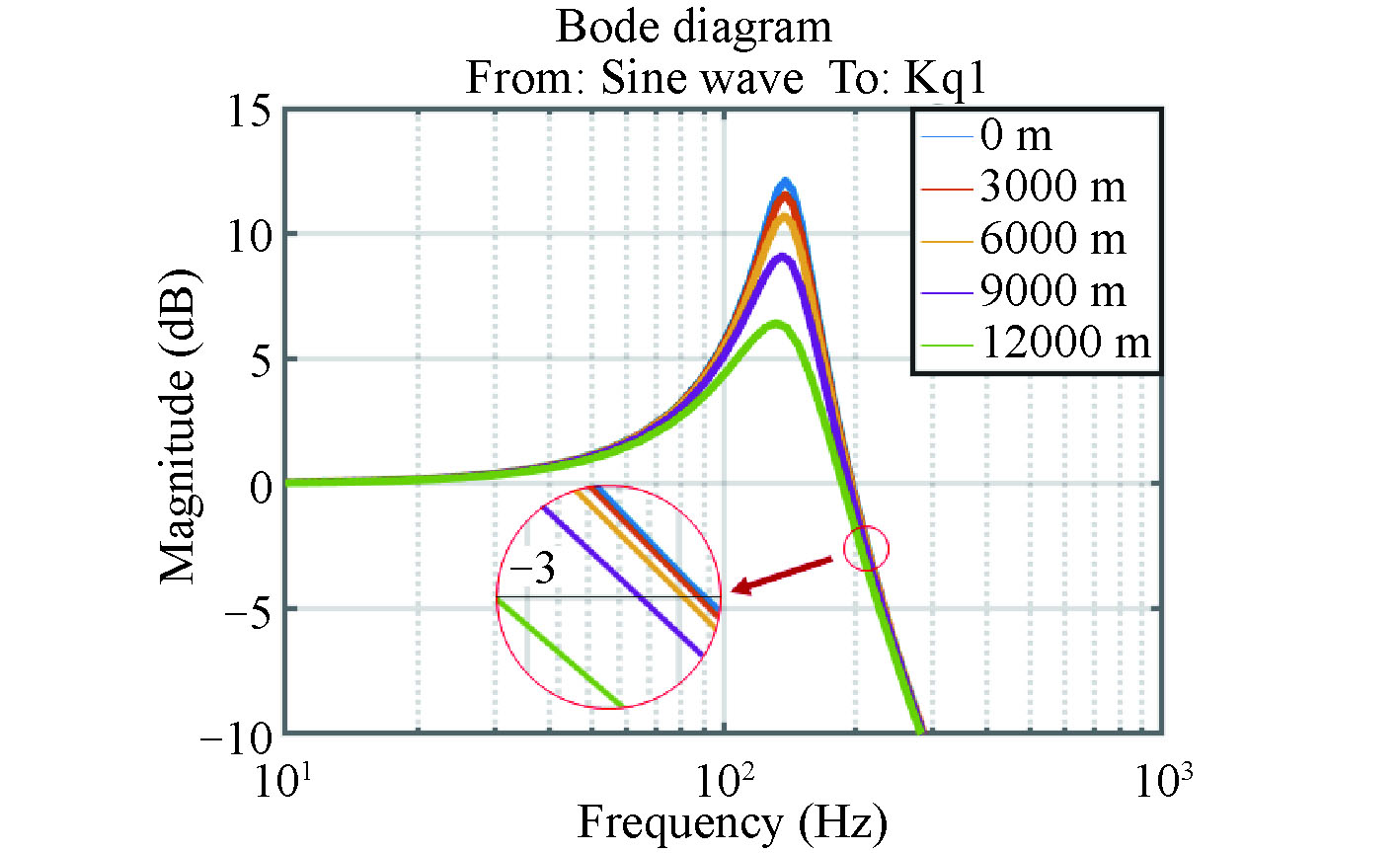
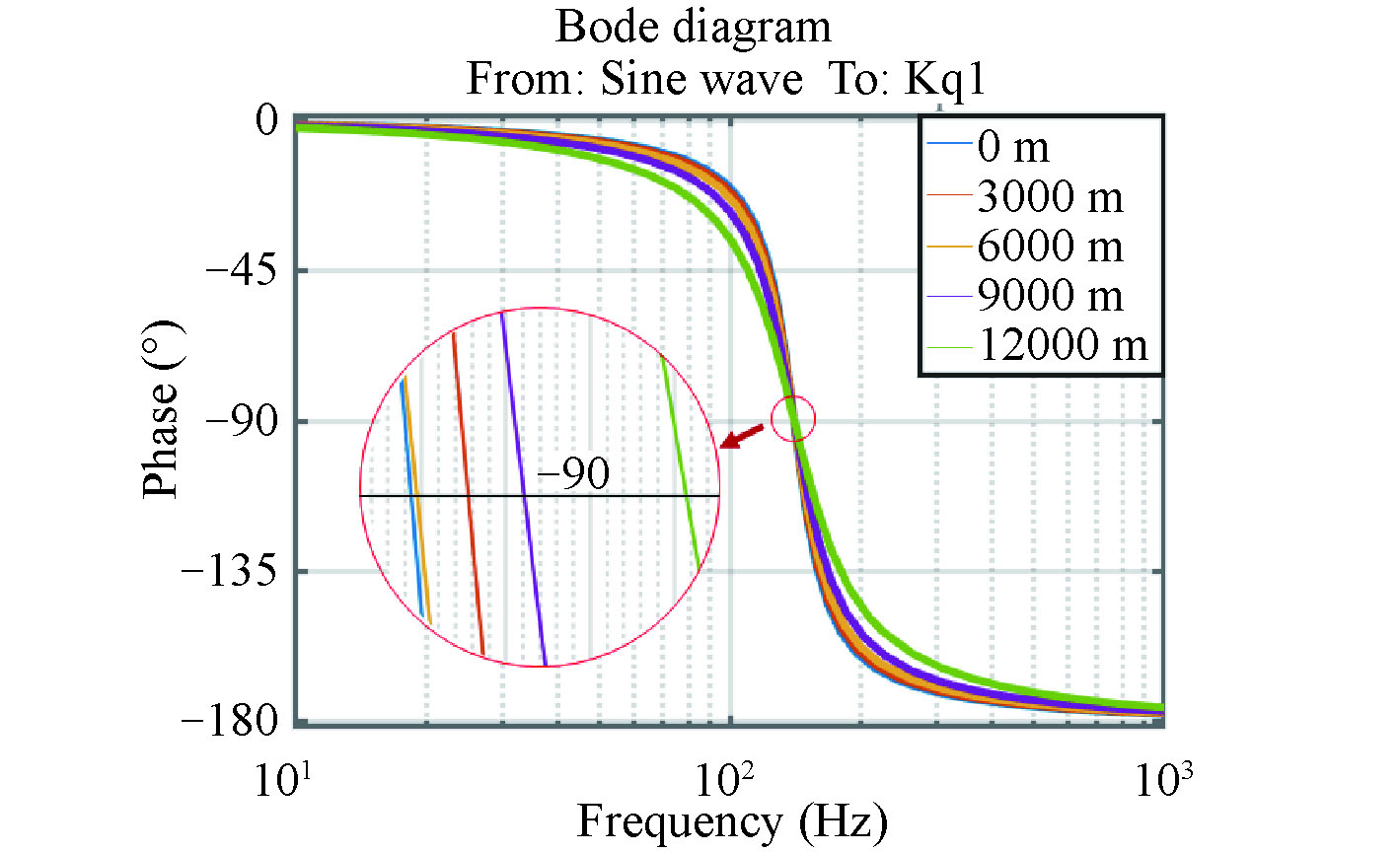
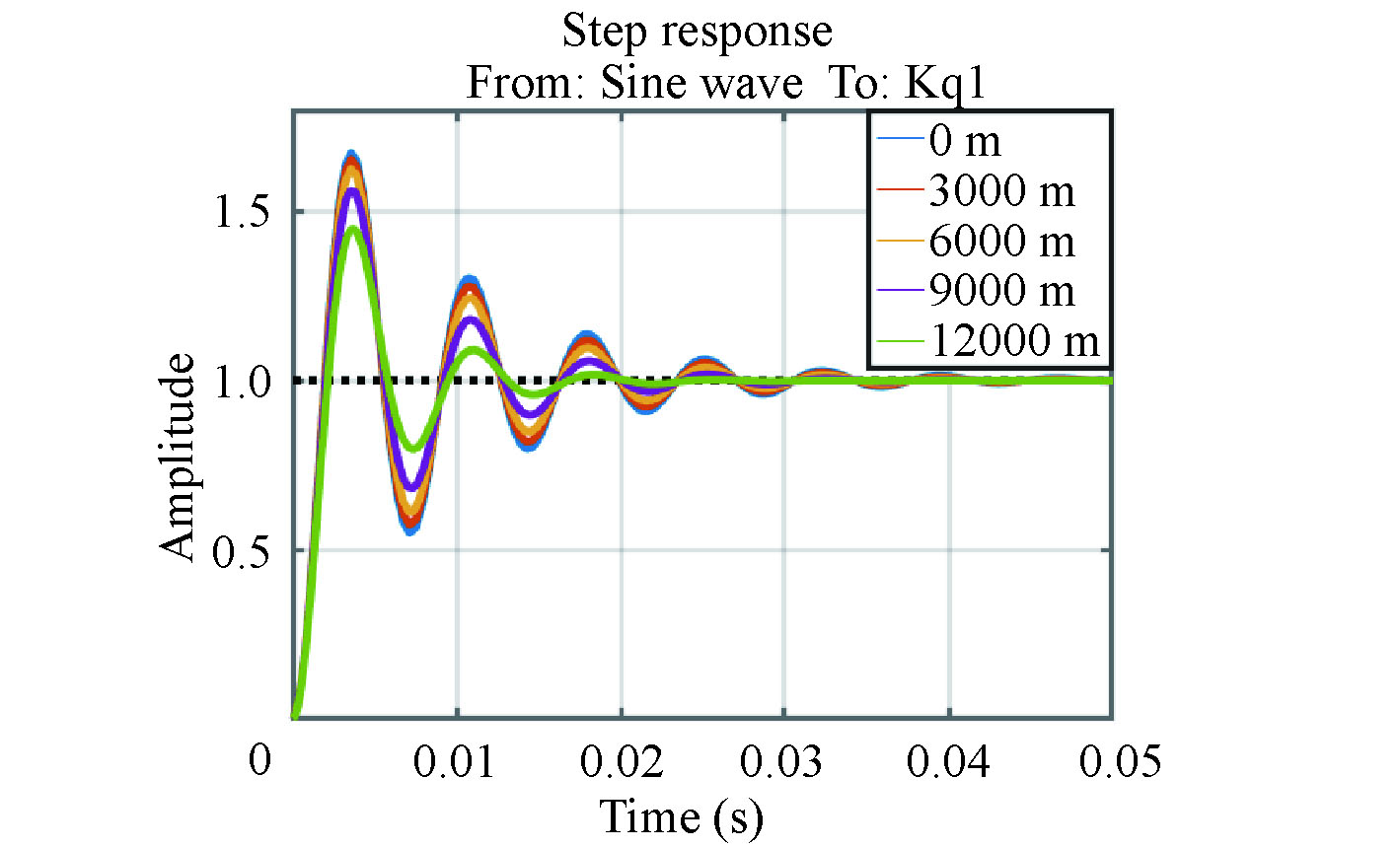
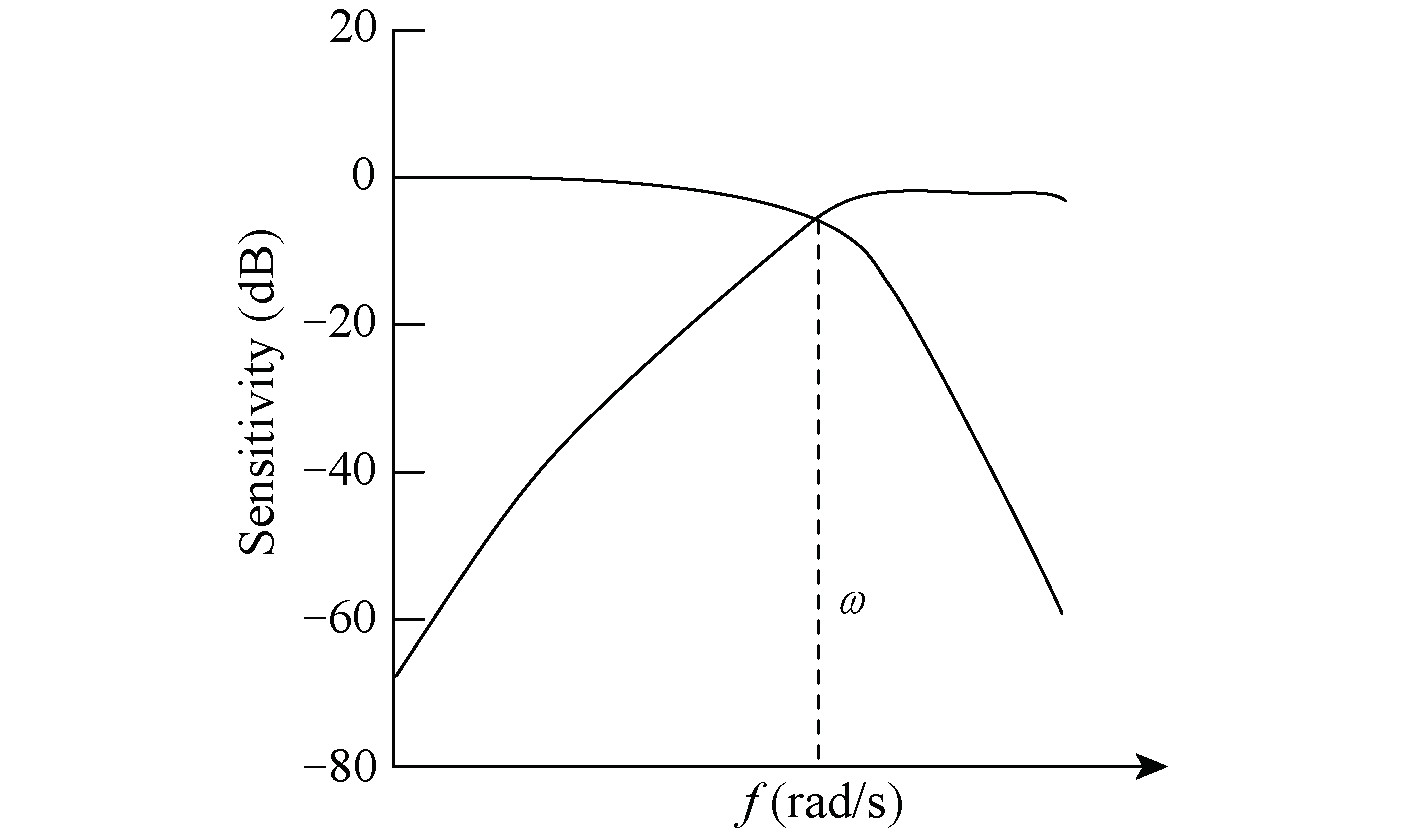
Hydraulic technology has the outstanding advantages of easy pressure compensation and high power density. It is an indispensable part of subsea equipment, such as deep-sea operations and submersible propulsion. There are few studies on electrohydraulic servo valves (EHSVs) in the deep sea. In this work, a novel electro-hydraulic servo rotary valve is designed, and its mathematical model is established. The analysis considers the variations in physical parameters such as temperature, ambient pressure, and oil viscosity resulting from changes in sea depth. This study focuses on the deformation of the rotary valve and the consequent alterations in leakage and friction torque. The findings indicate that at a depth of 12000 m, the fit clearance between the valve spool and the valve sleeve is 0.00413 mm, representing a 17% reduction compared with the clearance in a land environment. Then, the response of the rotary valve to depth is analyzed. The results indicate that the bandwidth of the rotary valve decreases with increasing depth. This study provides a reference for the use of the EHSV in the deep sea.
Hydraulic technology has the outstanding advantages of easy pressure compensation and high power density. It is an indispensable part of subsea equipment, such as deep-sea operations and submersible propulsion. There are few studies on electrohydraulic servo valves (EHSVs) in the deep sea. In this work, a novel electro-hydraulic servo rotary valve is designed, and its mathematical model is established. The analysis considers the variations in physical parameters such as temperature, ambient pressure, and oil viscosity resulting from changes in sea depth. This study focuses on the deformation of the rotary valve and the consequent alterations in leakage and friction torque. The findings indicate that at a depth of 12000 m, the fit clearance between the valve spool and the valve sleeve is 0.00413 mm, representing a 17% reduction compared with the clearance in a land environment. Then, the response of the rotary valve to depth is analyzed. The results indicate that the bandwidth of the rotary valve decreases with increasing depth. This study provides a reference for the use of the EHSV in the deep sea.







2025, 39(2)
:340-353.
doi: 10.1007/s13344-025-0026-5
Abstract:
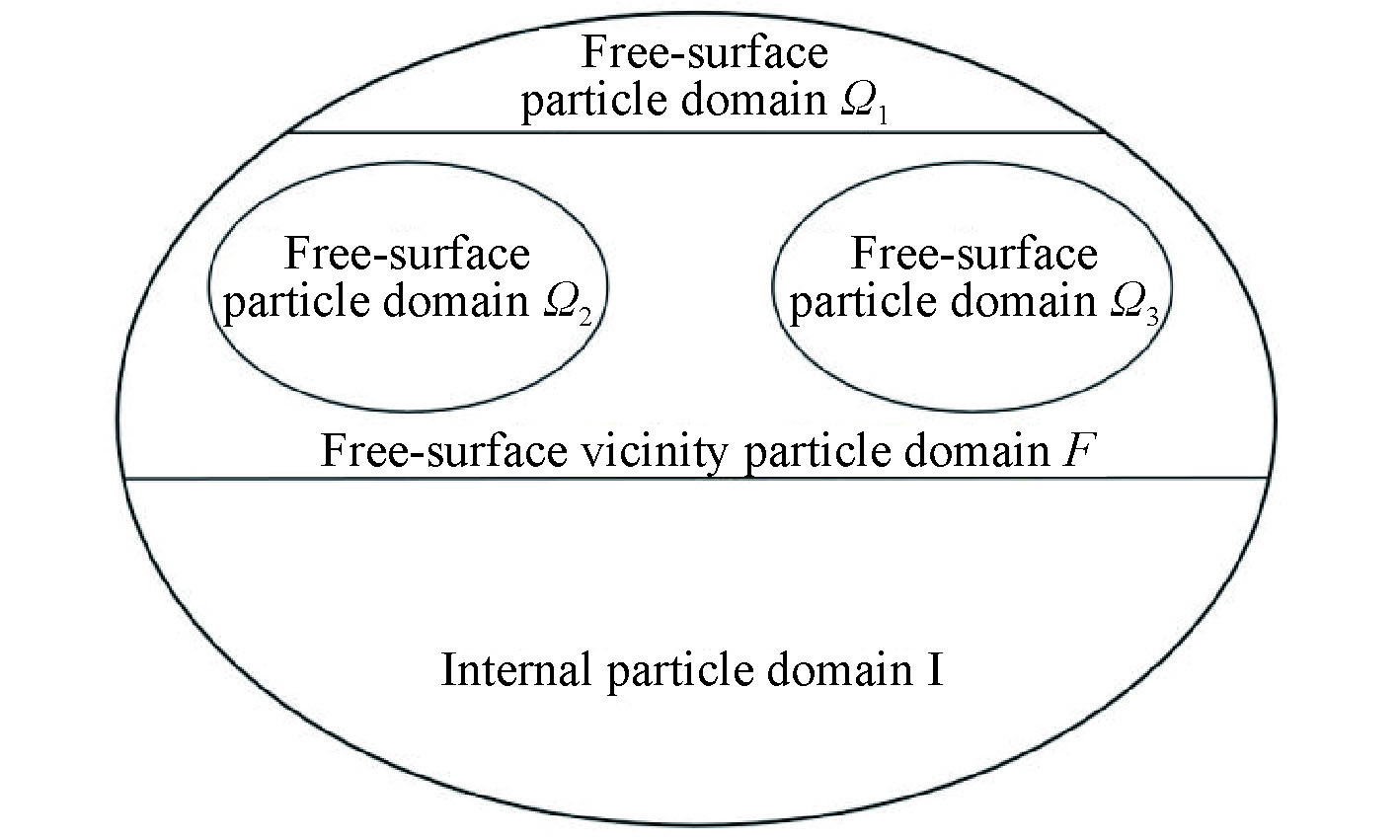
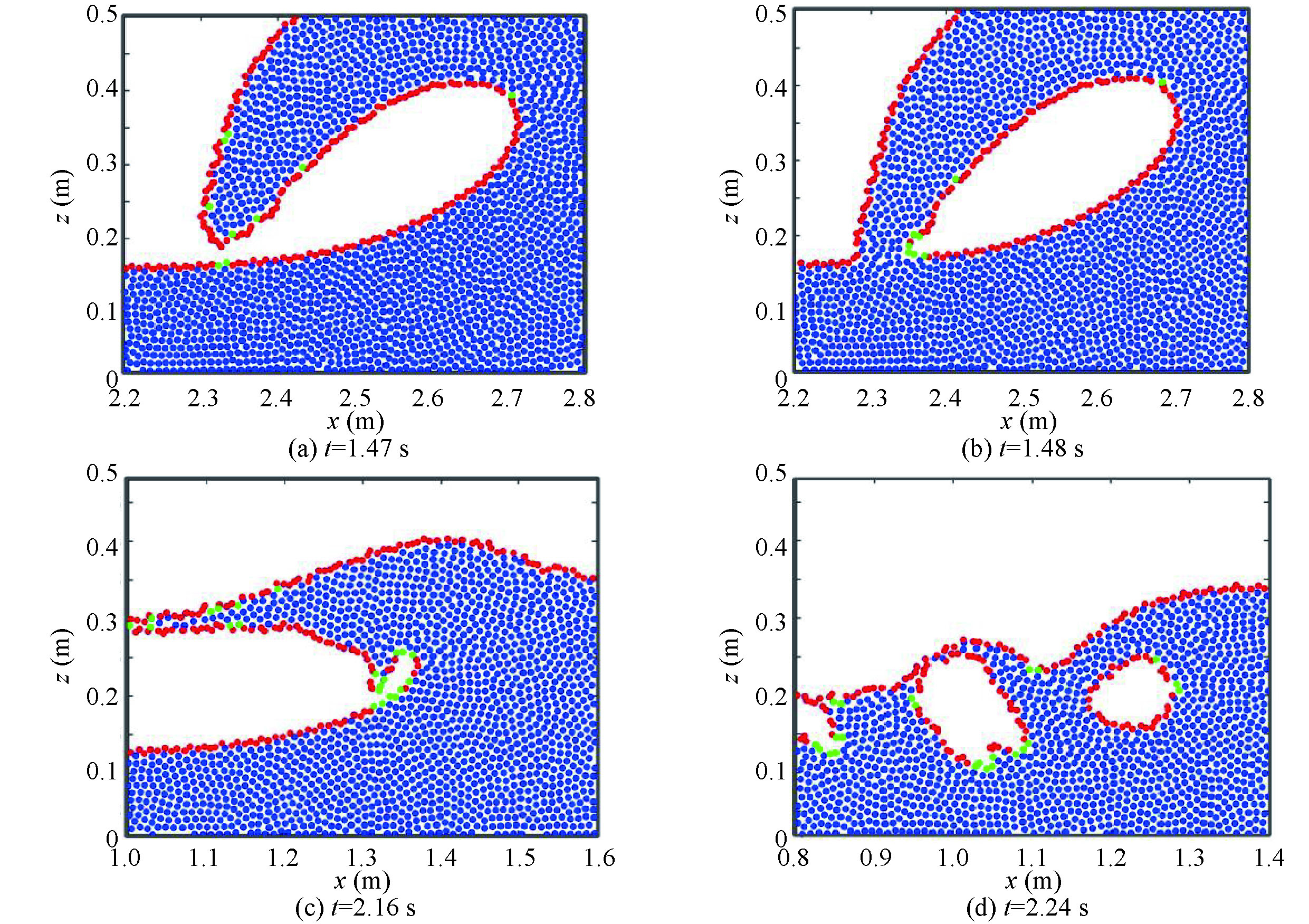
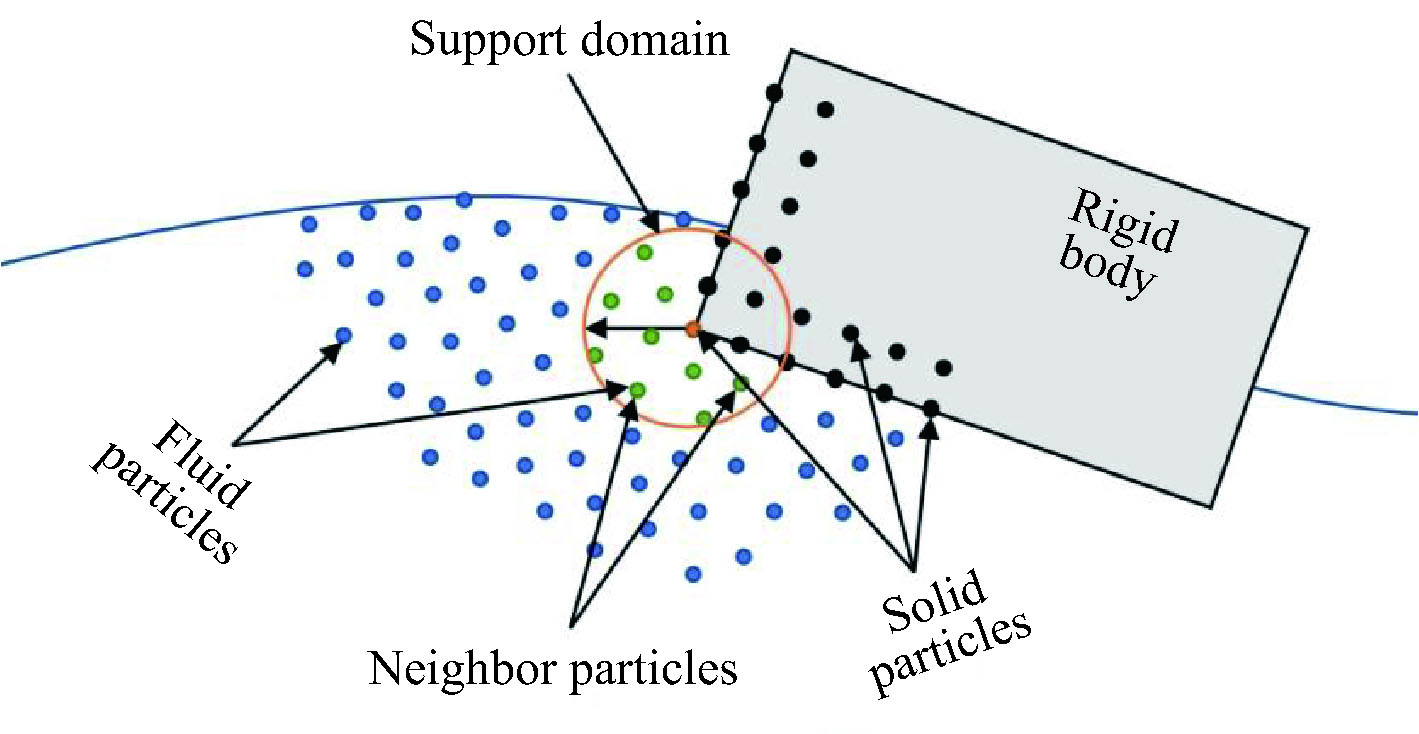
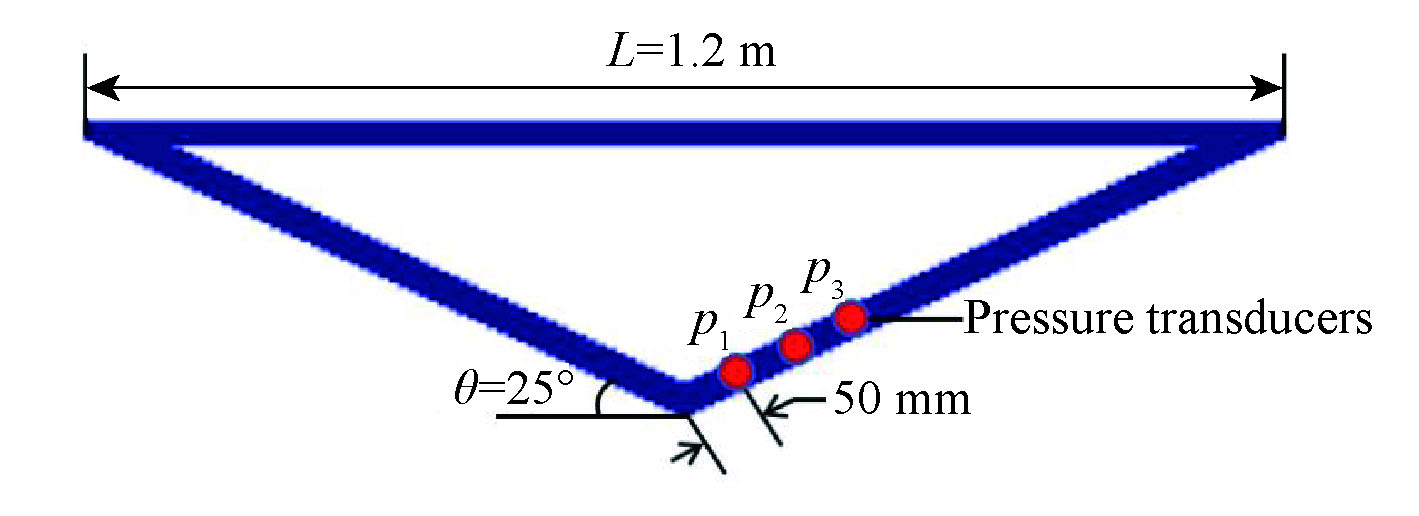
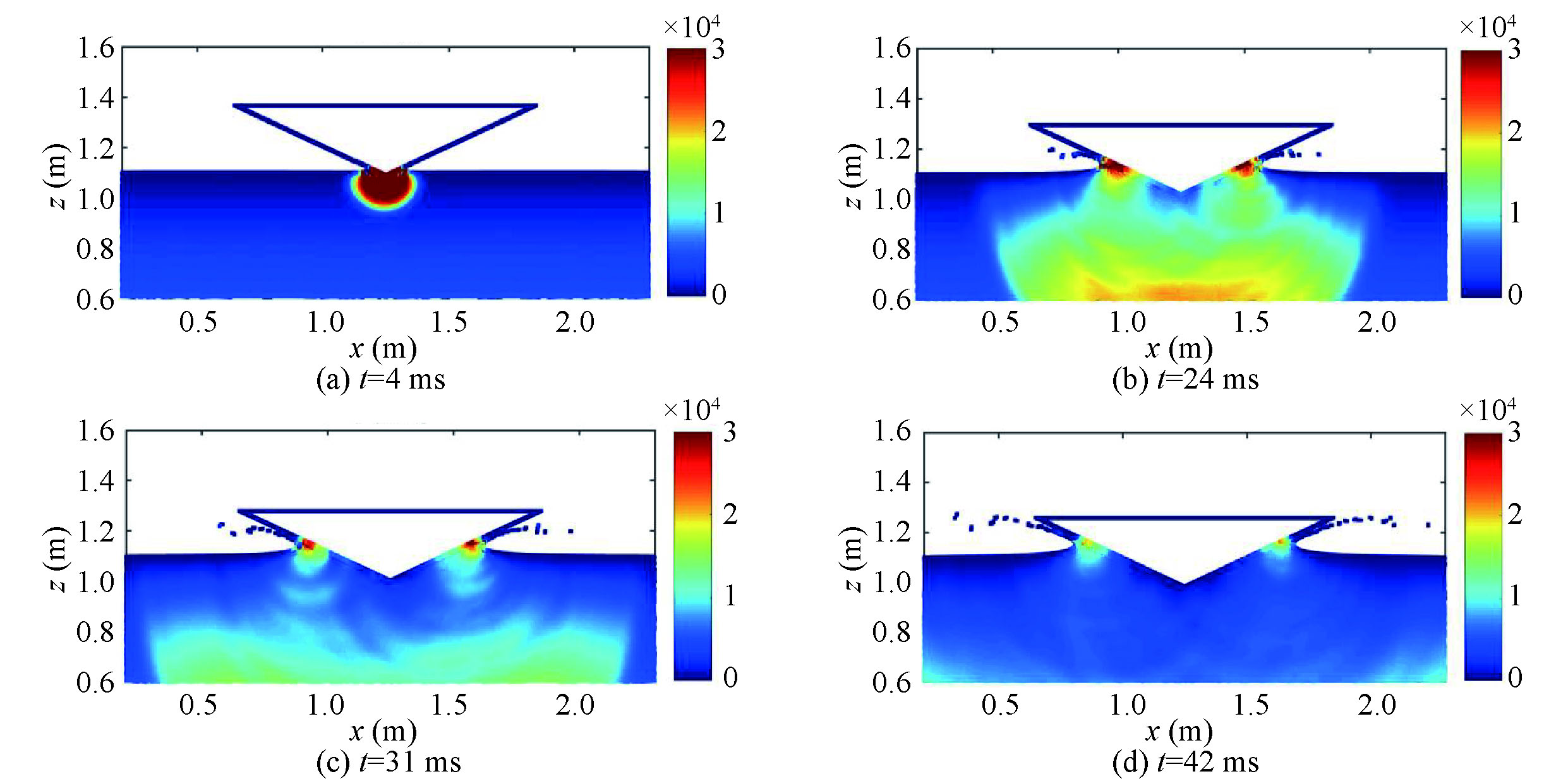
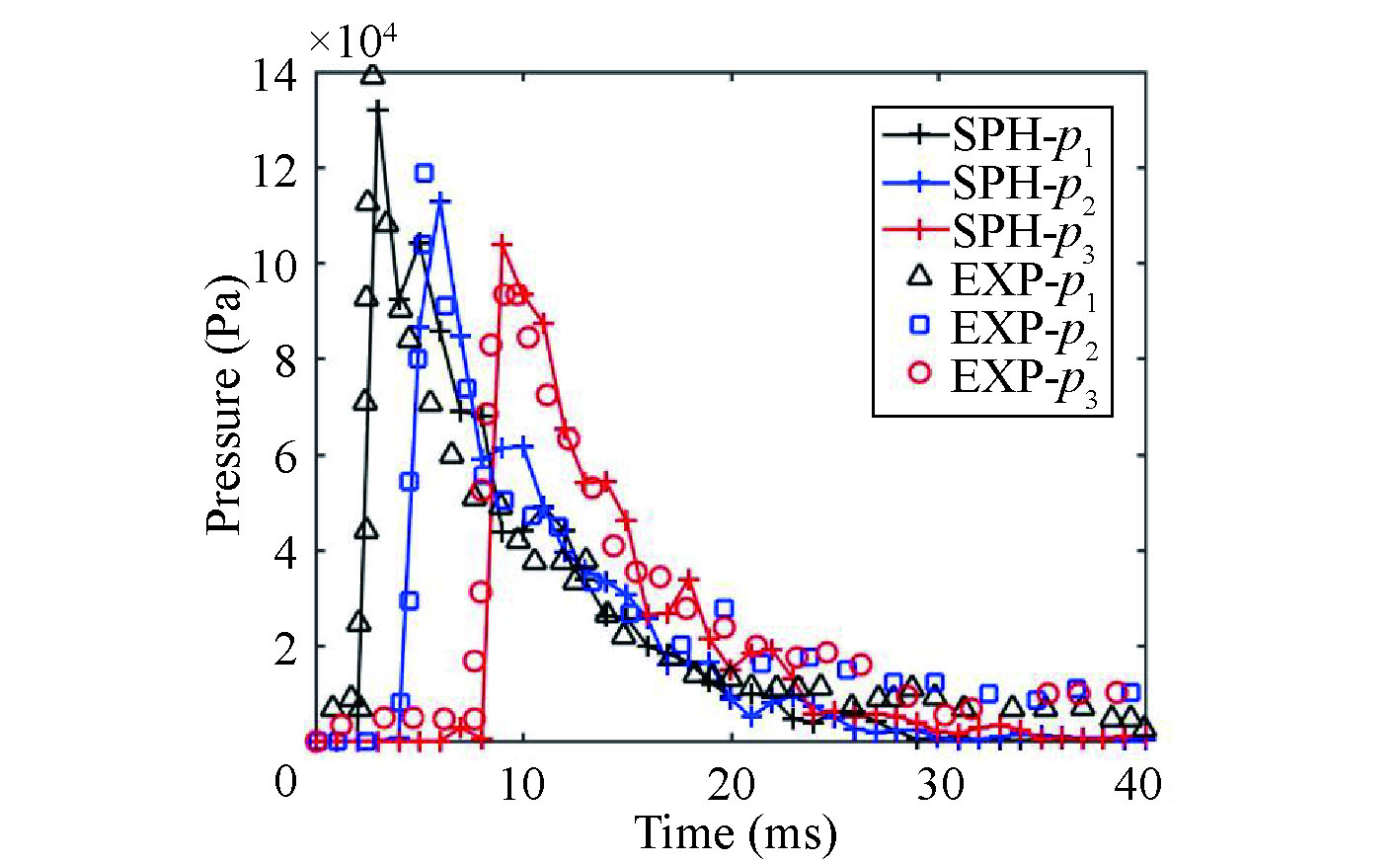
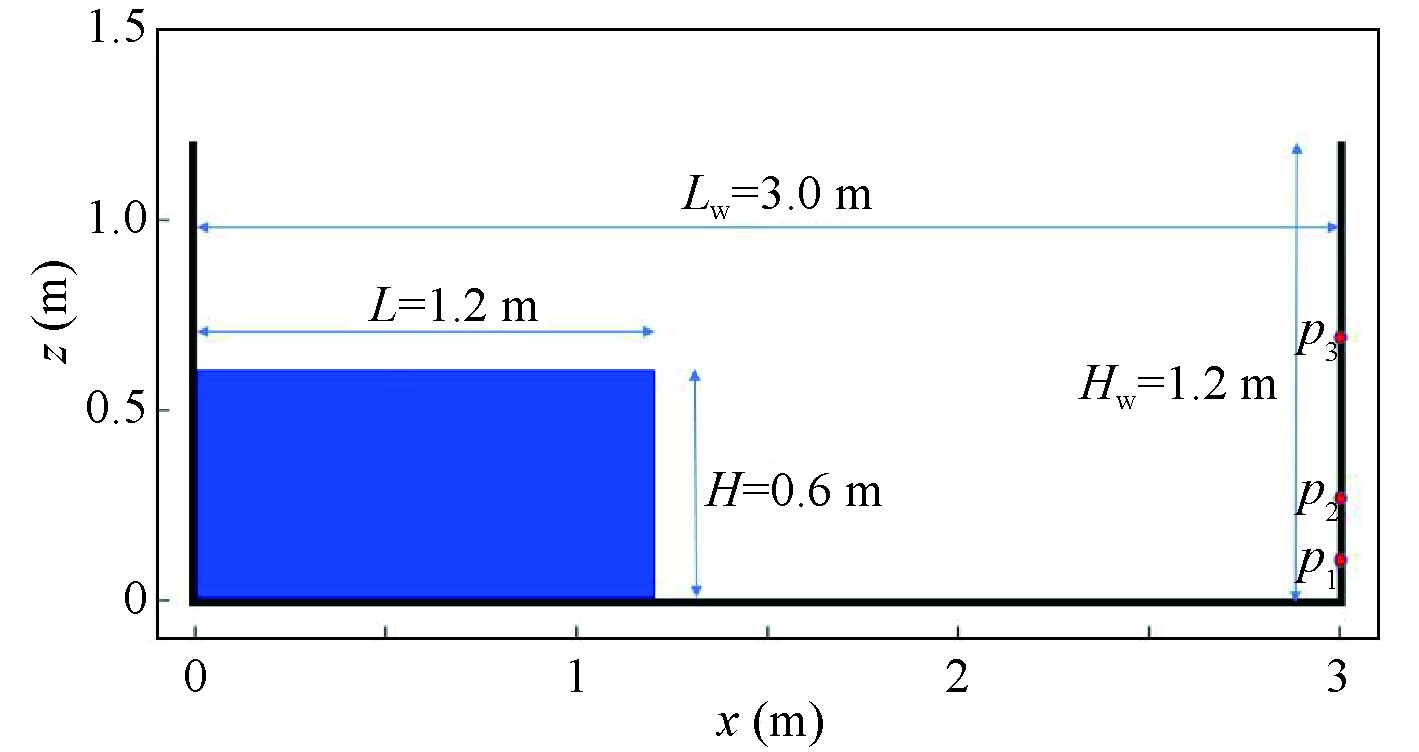
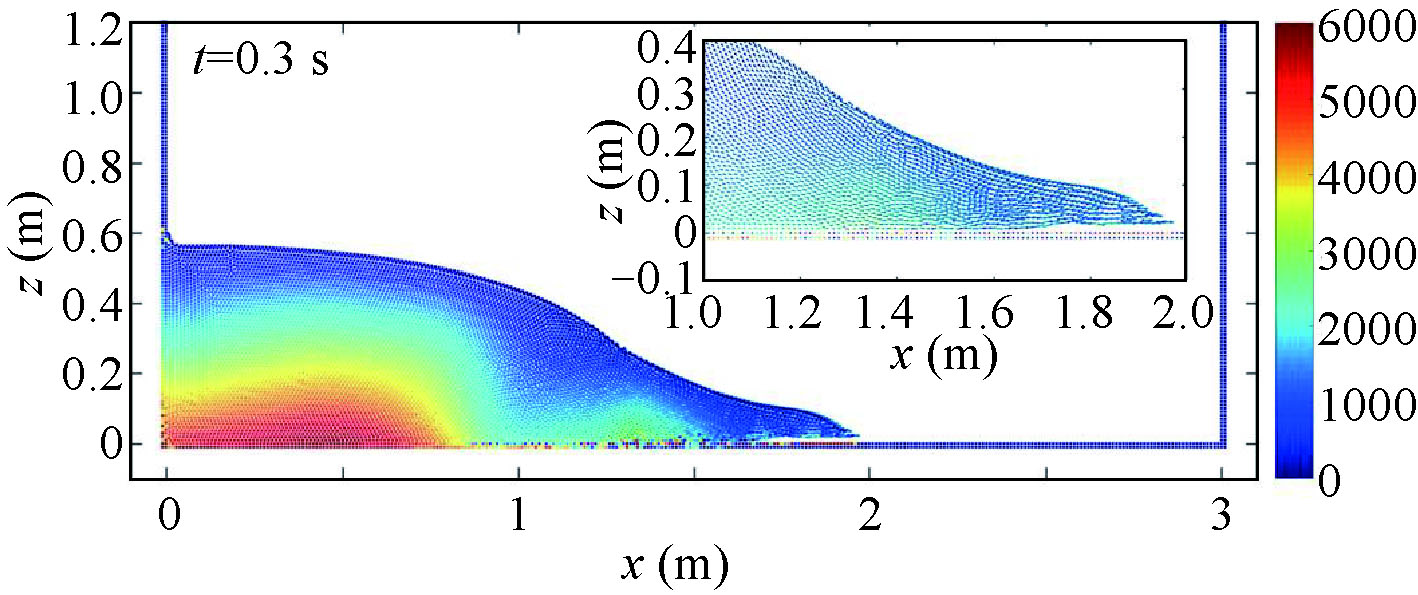
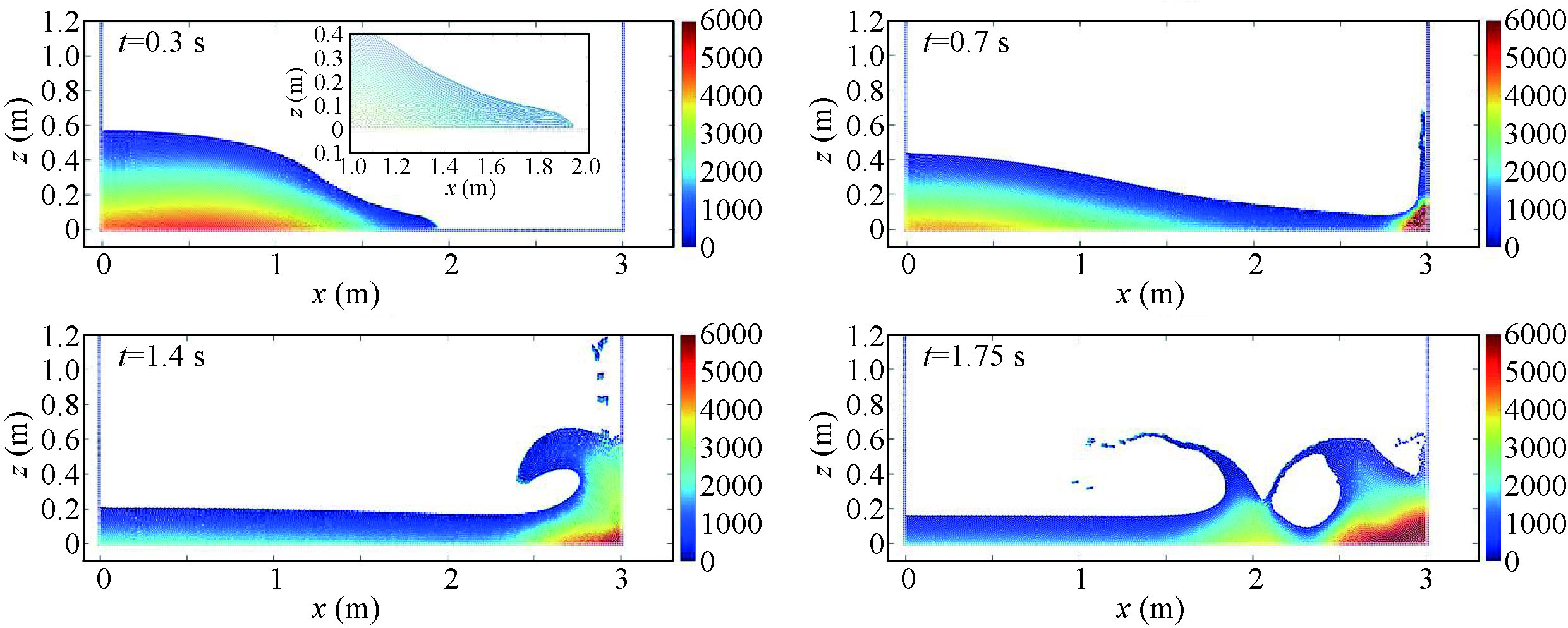
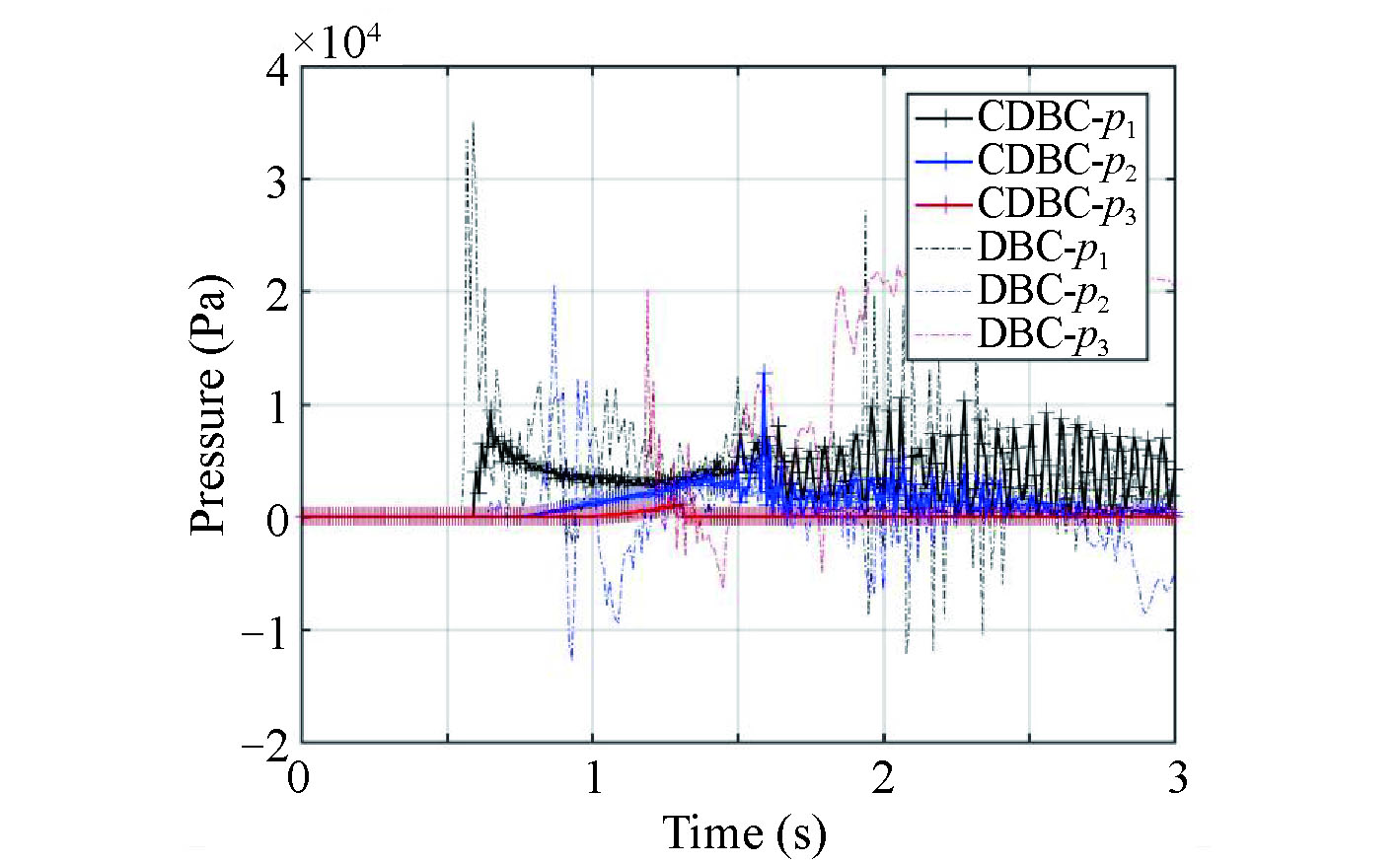
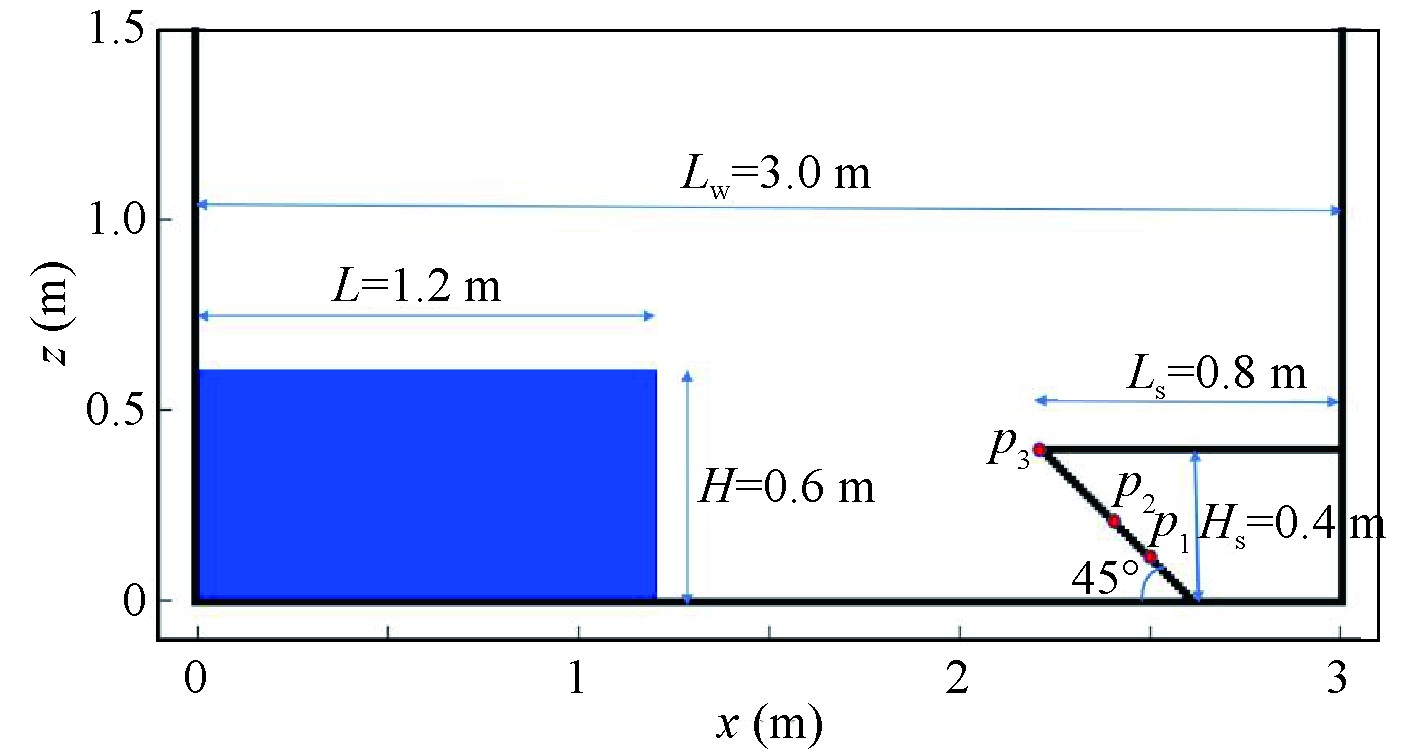
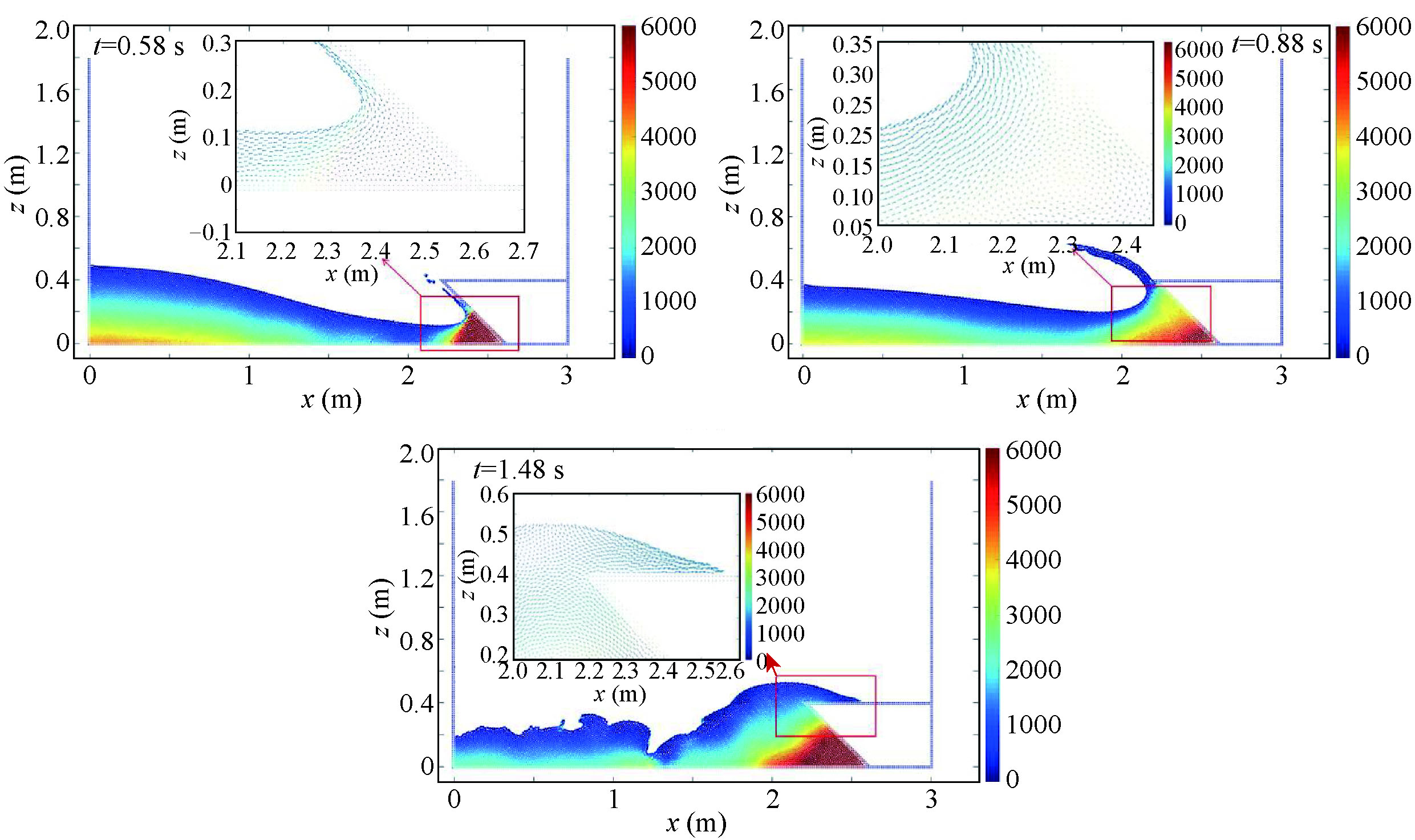
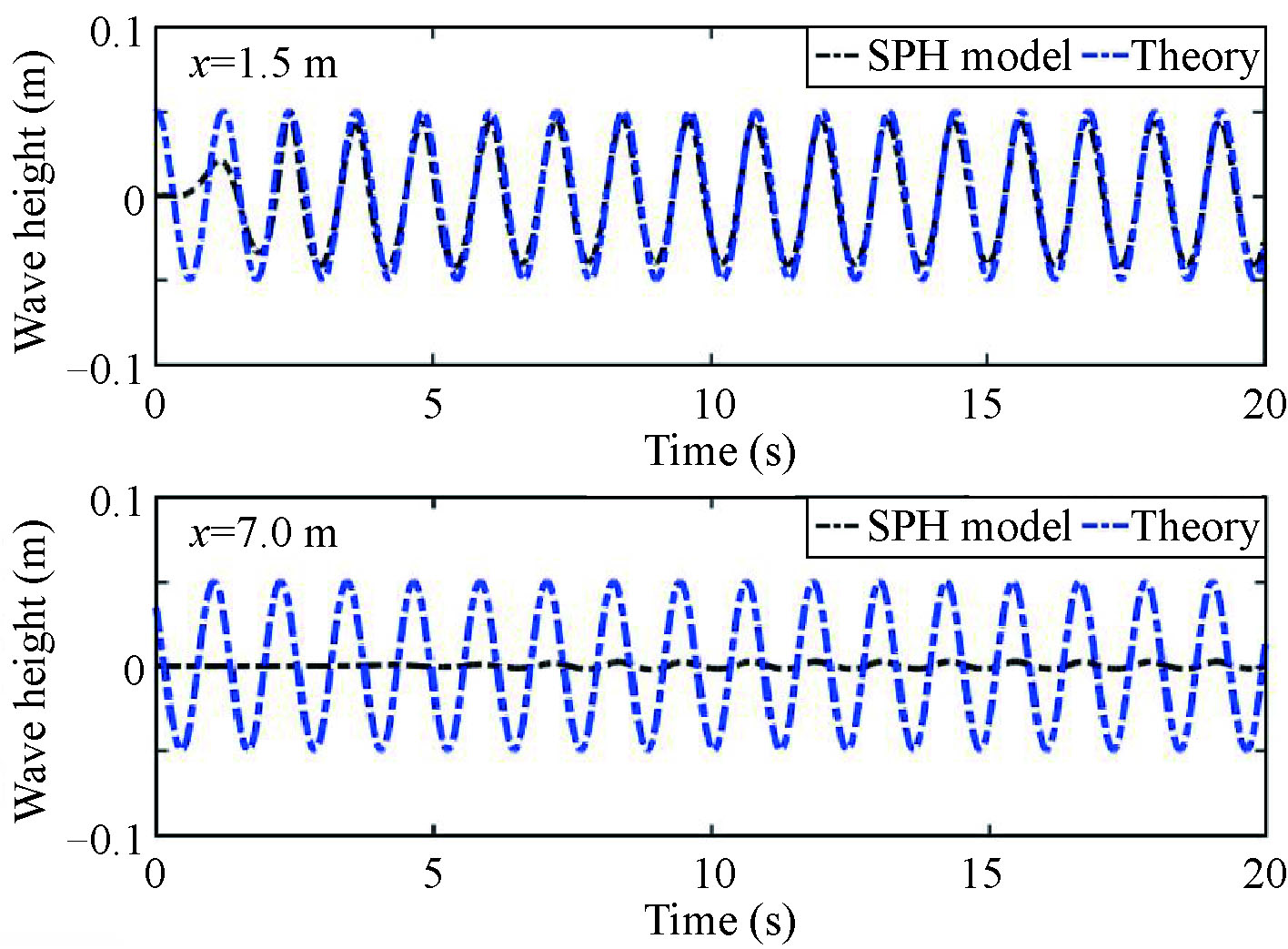
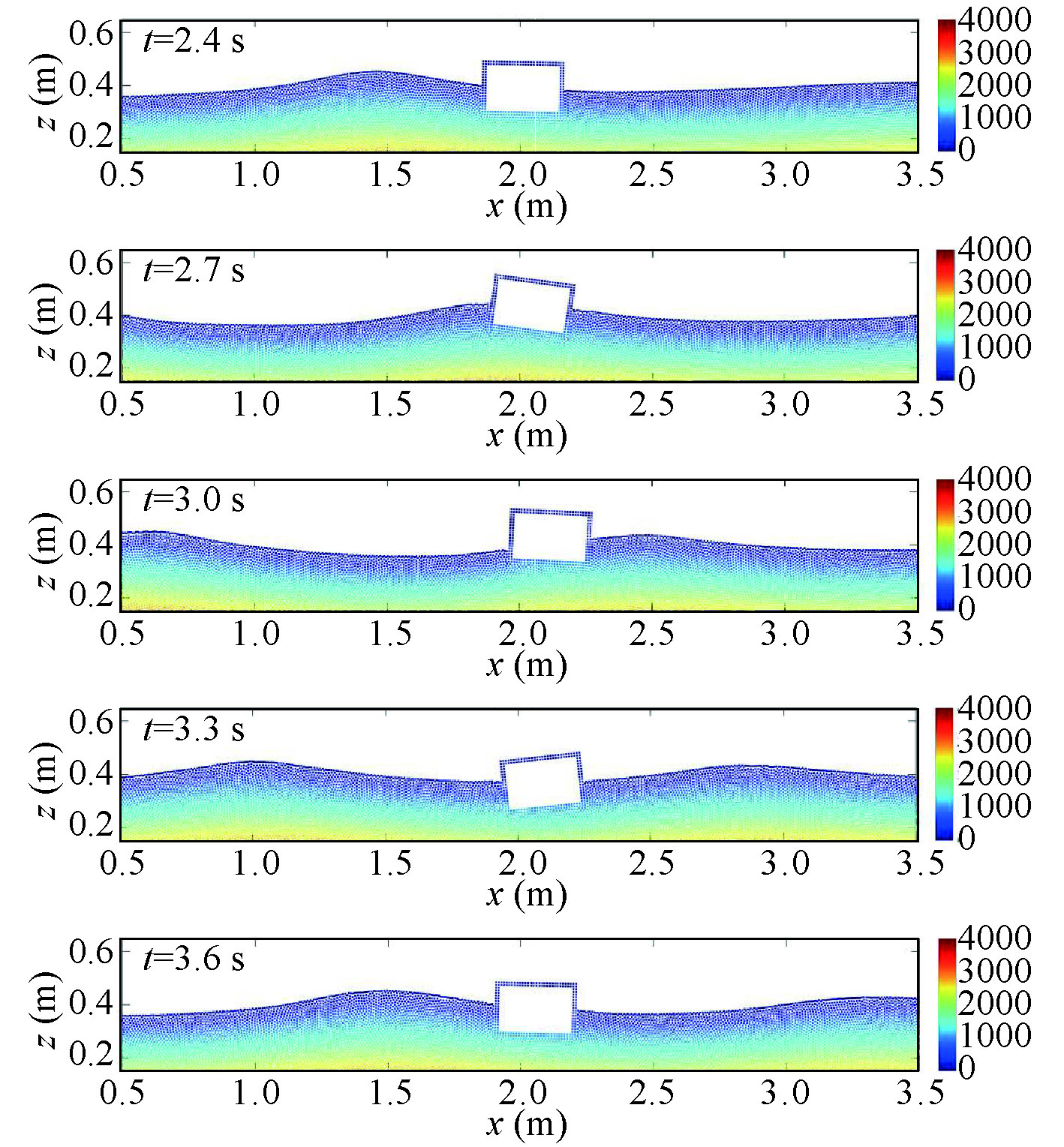
The weakly compressible smooth particle hydrodynamics (WCSPH) model is studied to address the boundary pressure instability of the SPH method, resulting in the development of the SPH method with improved dynamic boundary conditions. This method employs the ‘fan’ search method for free surface detection, effectively identifying cavity interface particles with diameters smaller than the support domain’s radius, thereby indirectly enhancing the algorithm’s accuracy. On this basis, an improved dynamic boundary condition is proposed by updating the boundary particle pressure calculation scheme to achieve a more stable and continuous pressure field, thereby effectively preventing particles from penetrating the boundary. The SPH method with improved dynamic boundary conditions is used to simulate typical high-speed impact problems such as wedge entry and dam break. The simulation results are in good agreement with the experimental data and other numerical results.
The weakly compressible smooth particle hydrodynamics (WCSPH) model is studied to address the boundary pressure instability of the SPH method, resulting in the development of the SPH method with improved dynamic boundary conditions. This method employs the ‘fan’ search method for free surface detection, effectively identifying cavity interface particles with diameters smaller than the support domain’s radius, thereby indirectly enhancing the algorithm’s accuracy. On this basis, an improved dynamic boundary condition is proposed by updating the boundary particle pressure calculation scheme to achieve a more stable and continuous pressure field, thereby effectively preventing particles from penetrating the boundary. The SPH method with improved dynamic boundary conditions is used to simulate typical high-speed impact problems such as wedge entry and dam break. The simulation results are in good agreement with the experimental data and other numerical results.








2025, 39(2)
:354-364.
doi: 10.1007/s13344-025-0027-4
Abstract:
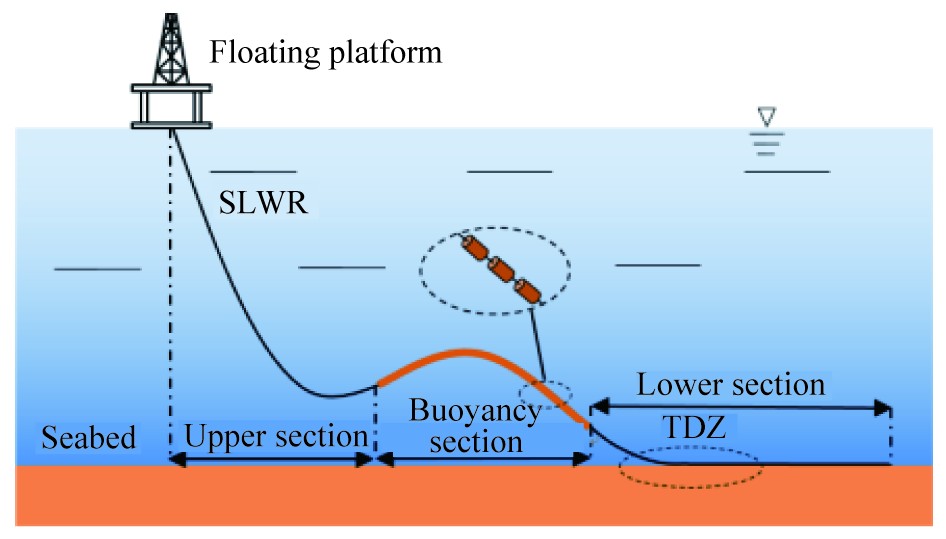
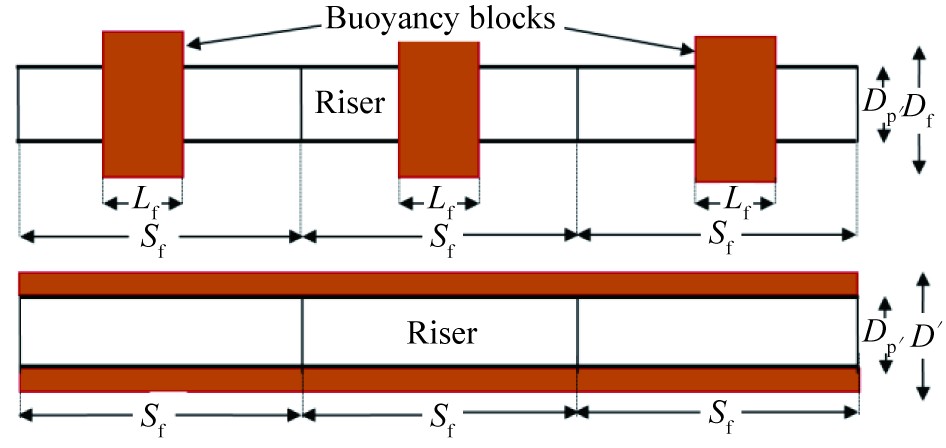
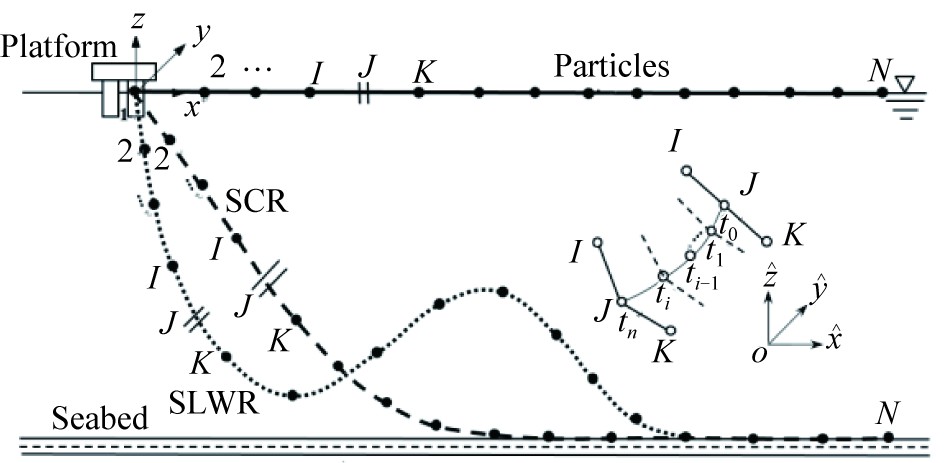
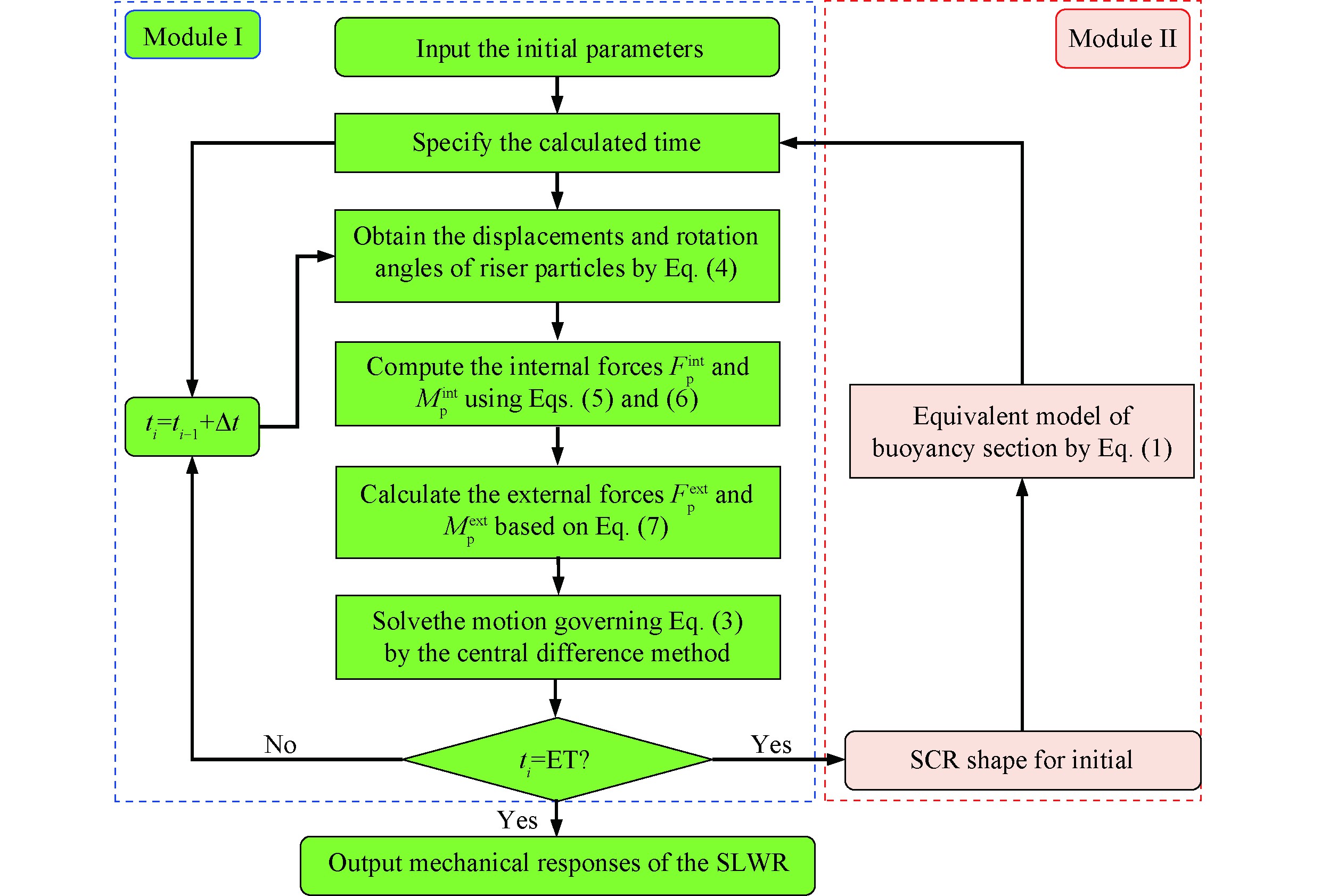
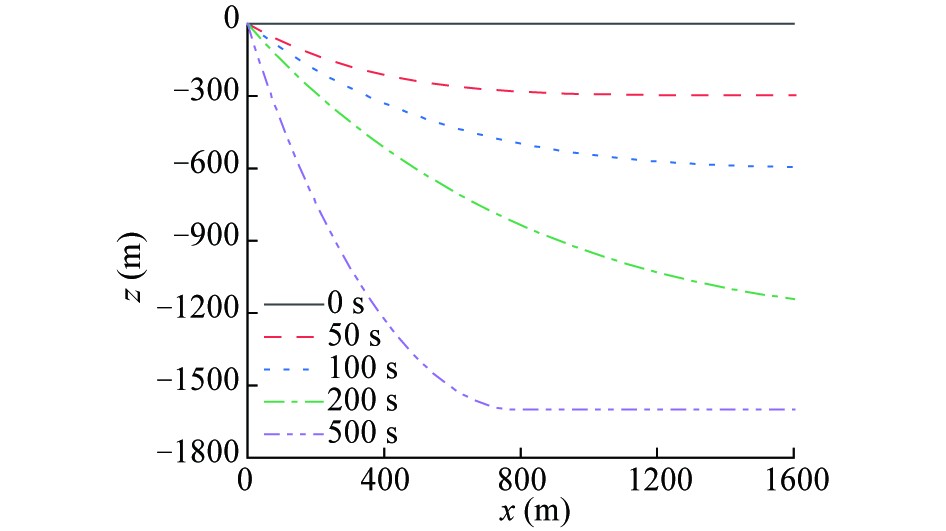
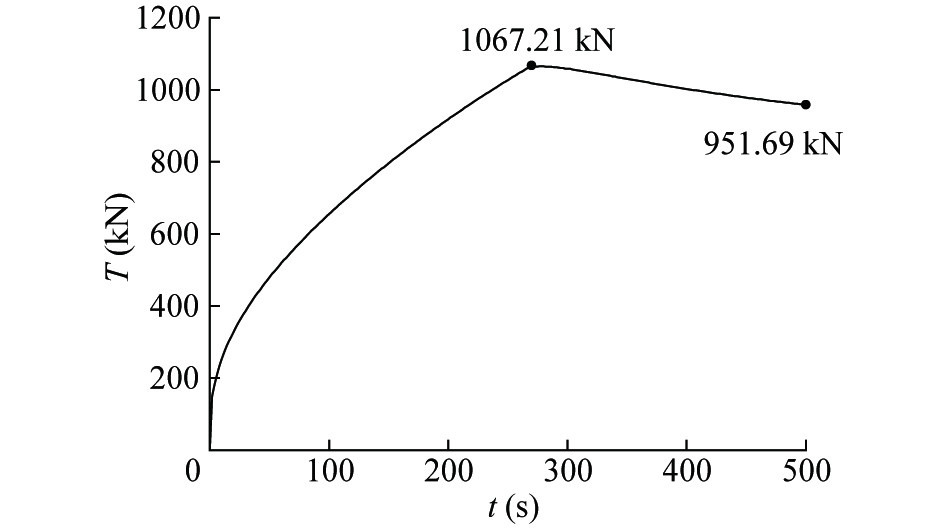
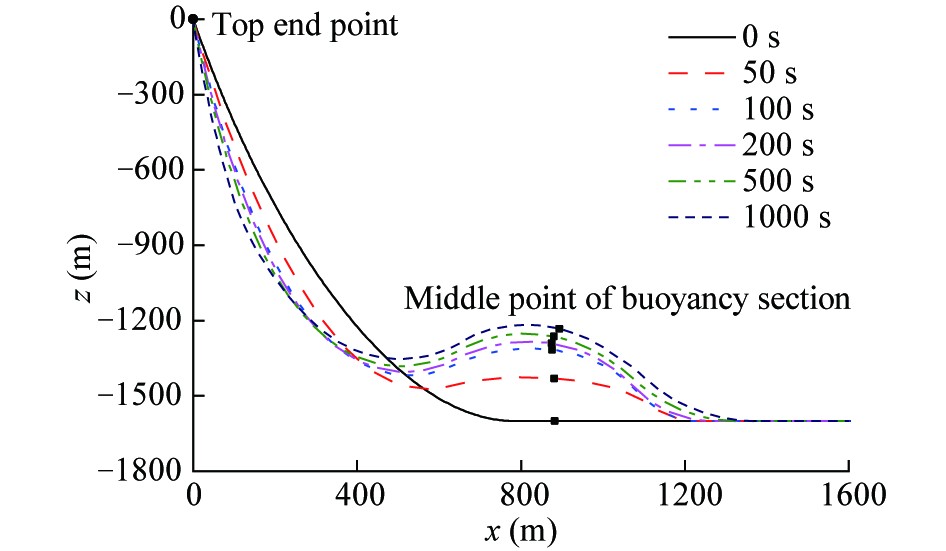
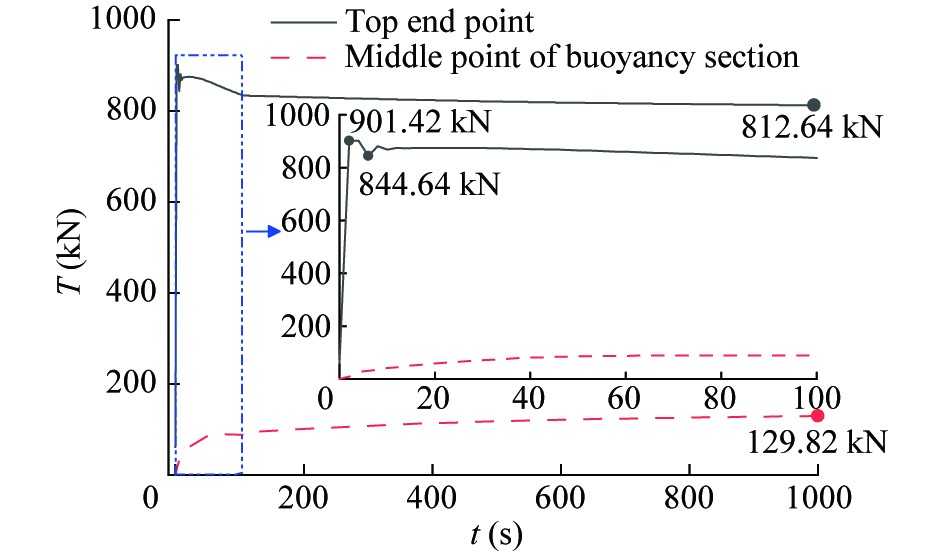
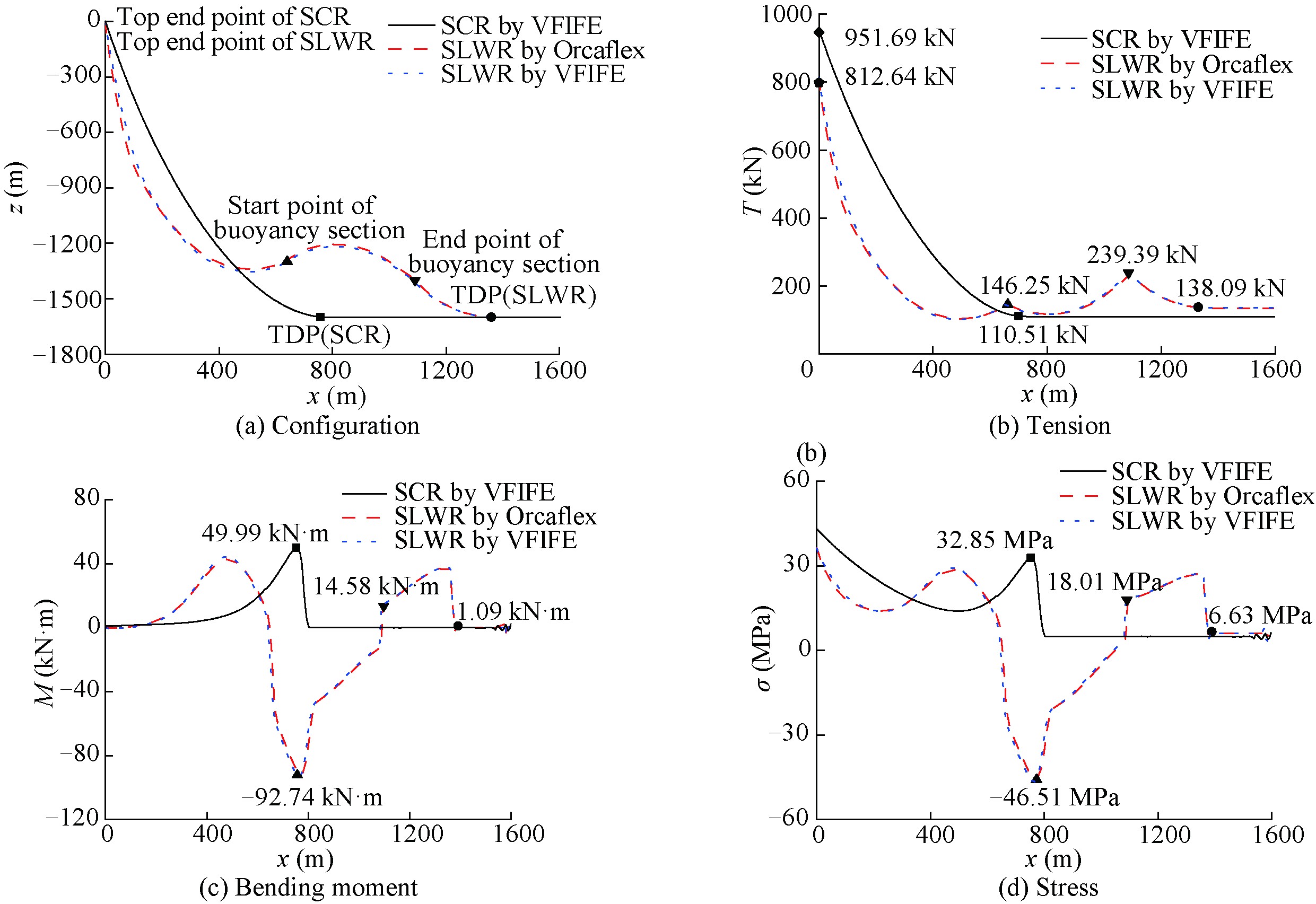
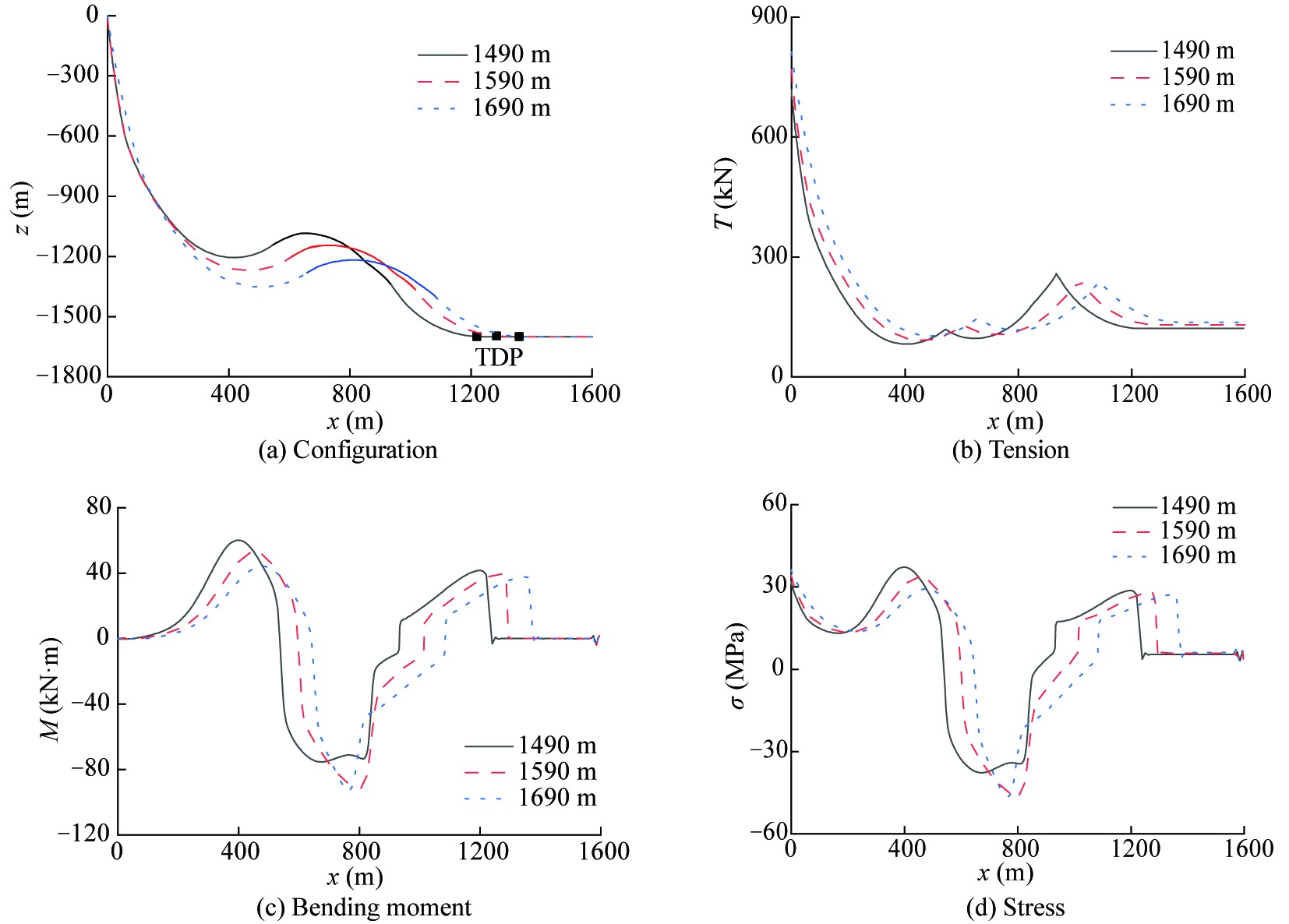
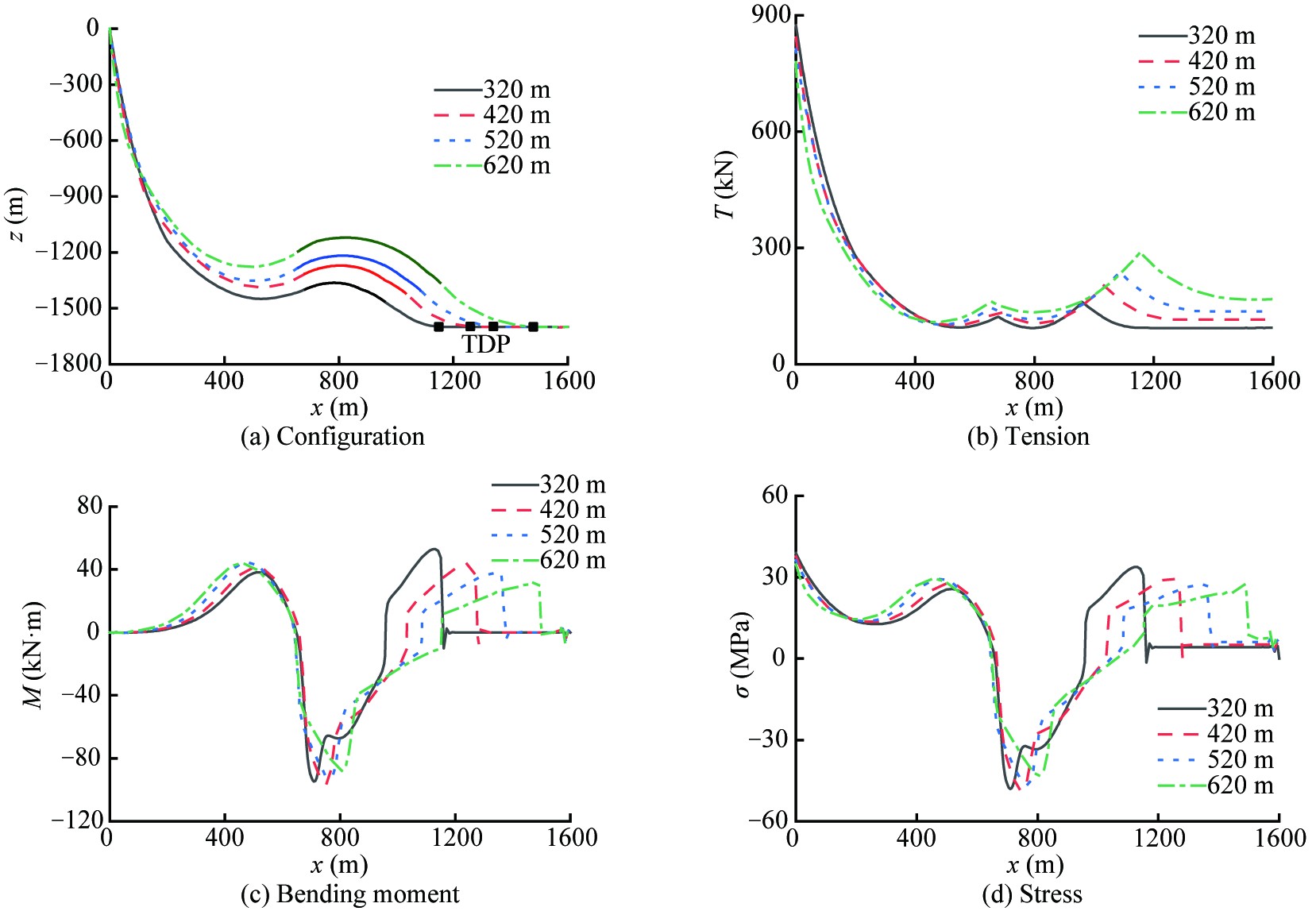
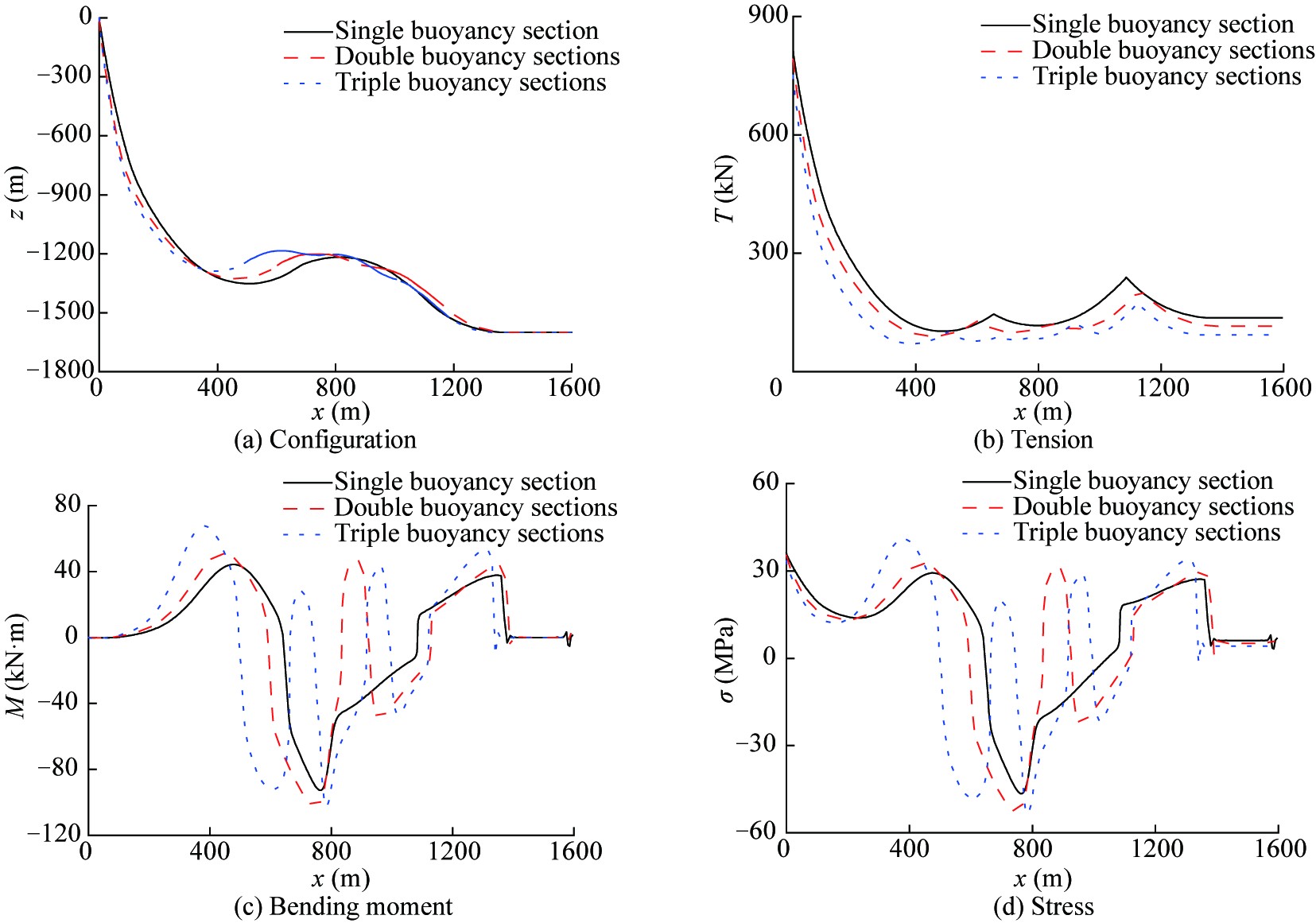
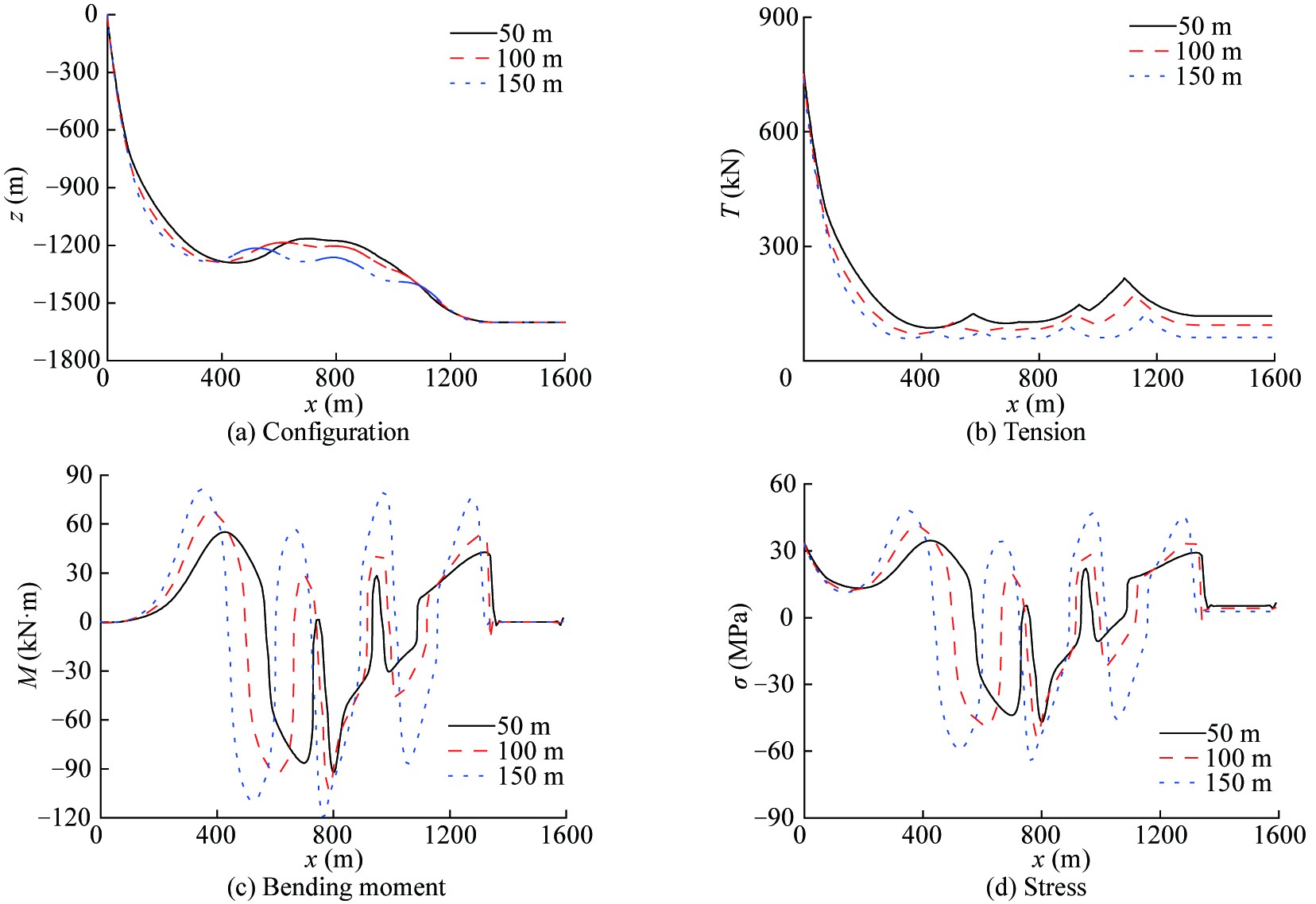
Steel lazy-wave riser (SLWR) is one of the key technical components of offshore oil-gas production systems and is widely utilized in deepwater areas. On the basis of the vector form intrinsic finite element (VFIFE) method, this study develops a reasonable numerical model for the SLWR to investigate the effects of the buoyancy section on its mechanical characteristics. In the SLWR model, the buoyancy section is simulated using an equivalent riser segment with the same outer diameter and unit weight. The riser is considered to be composed of a series of space vector particles connected by elements, and virtual reverse motions are applied to establish the fundamental equations of forces and displacements. The explicit central difference technique is used to solve the governing equations for particle motion within the riser through programming implementation. To provide a detailed explanation of the process by which the SLWR achieves a stable lazy-wave configuration, a numerical model of a 2800-m-long riser is established at a water depth of 1600 m, and the feasibility of this model for riser behavior analysis is validated. The remarkable influences of the position, length, number and spacing of the buoyancy section on the mechanical behavior of the SLWR are observed, which provides a theoretical foundation for the optimal design of the SLWR in deepwaters.
Steel lazy-wave riser (SLWR) is one of the key technical components of offshore oil-gas production systems and is widely utilized in deepwater areas. On the basis of the vector form intrinsic finite element (VFIFE) method, this study develops a reasonable numerical model for the SLWR to investigate the effects of the buoyancy section on its mechanical characteristics. In the SLWR model, the buoyancy section is simulated using an equivalent riser segment with the same outer diameter and unit weight. The riser is considered to be composed of a series of space vector particles connected by elements, and virtual reverse motions are applied to establish the fundamental equations of forces and displacements. The explicit central difference technique is used to solve the governing equations for particle motion within the riser through programming implementation. To provide a detailed explanation of the process by which the SLWR achieves a stable lazy-wave configuration, a numerical model of a 2800-m-long riser is established at a water depth of 1600 m, and the feasibility of this model for riser behavior analysis is validated. The remarkable influences of the position, length, number and spacing of the buoyancy section on the mechanical behavior of the SLWR are observed, which provides a theoretical foundation for the optimal design of the SLWR in deepwaters.
2025, 39(2)
:365-372.
doi: 10.1007/s13344-025-0028-3
Abstract:
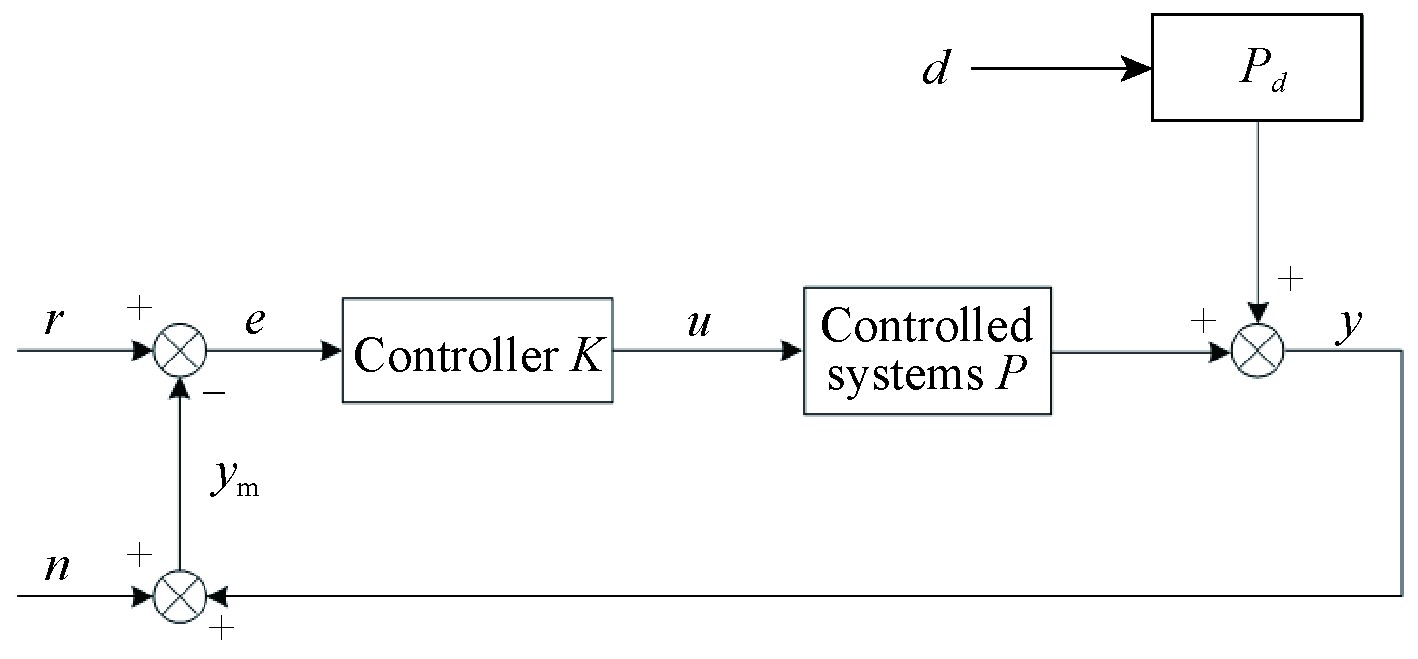
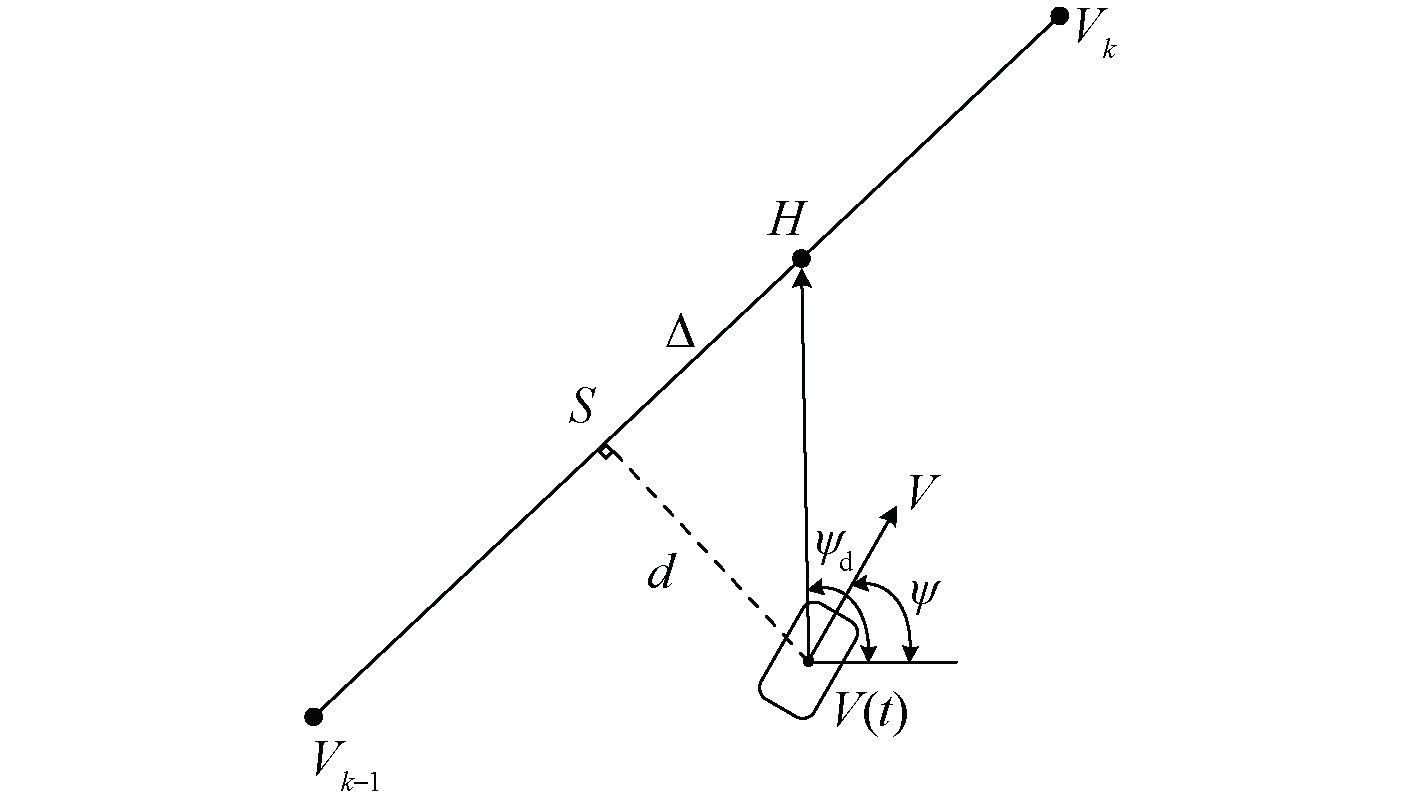
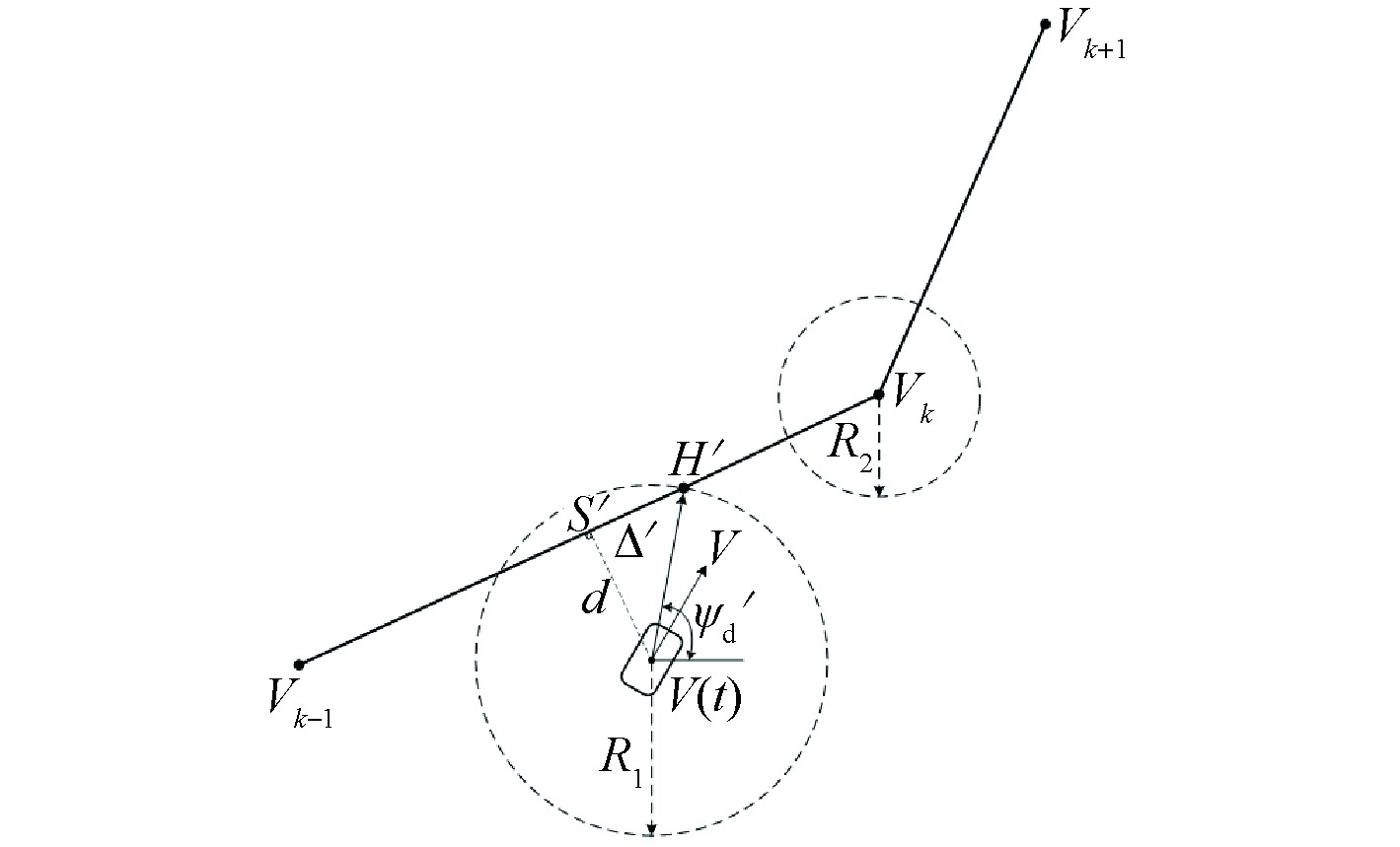
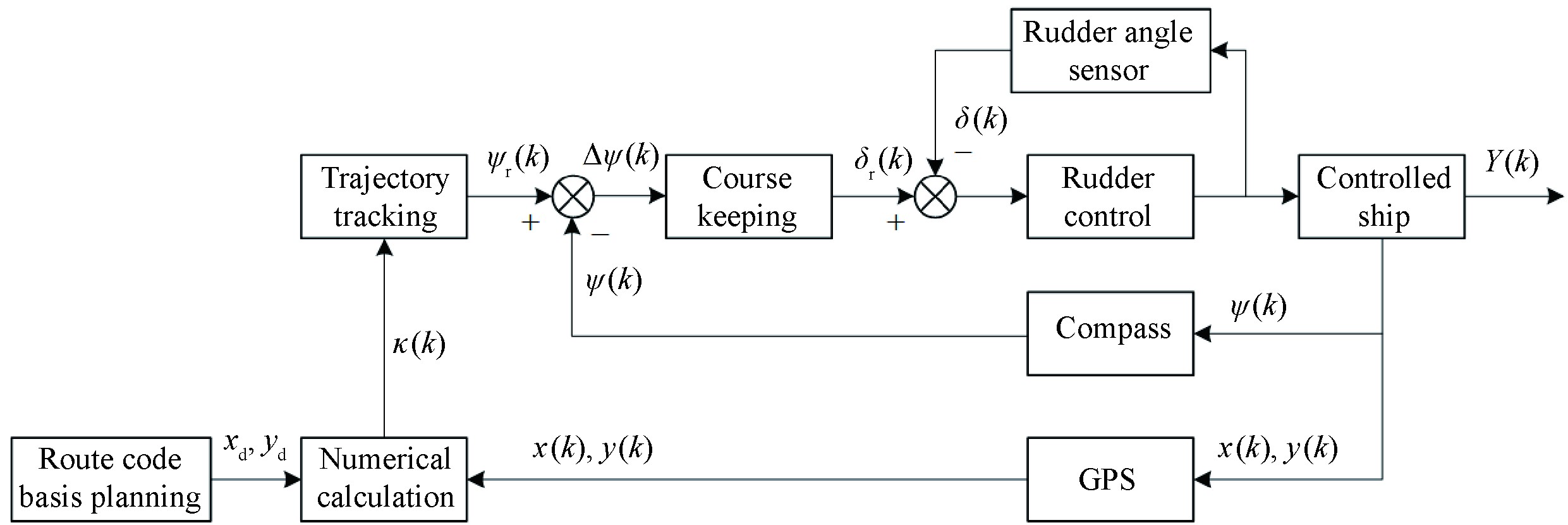
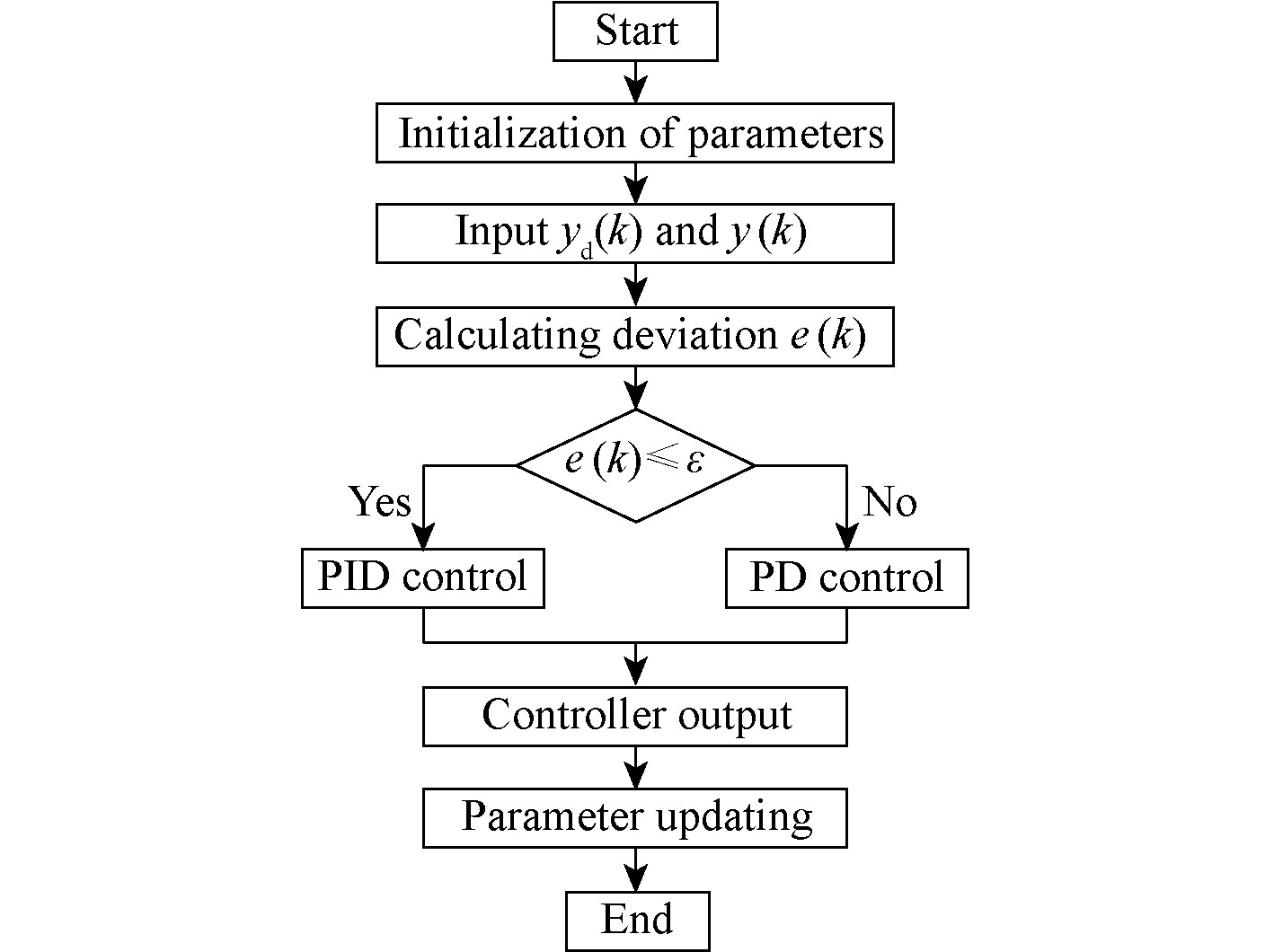
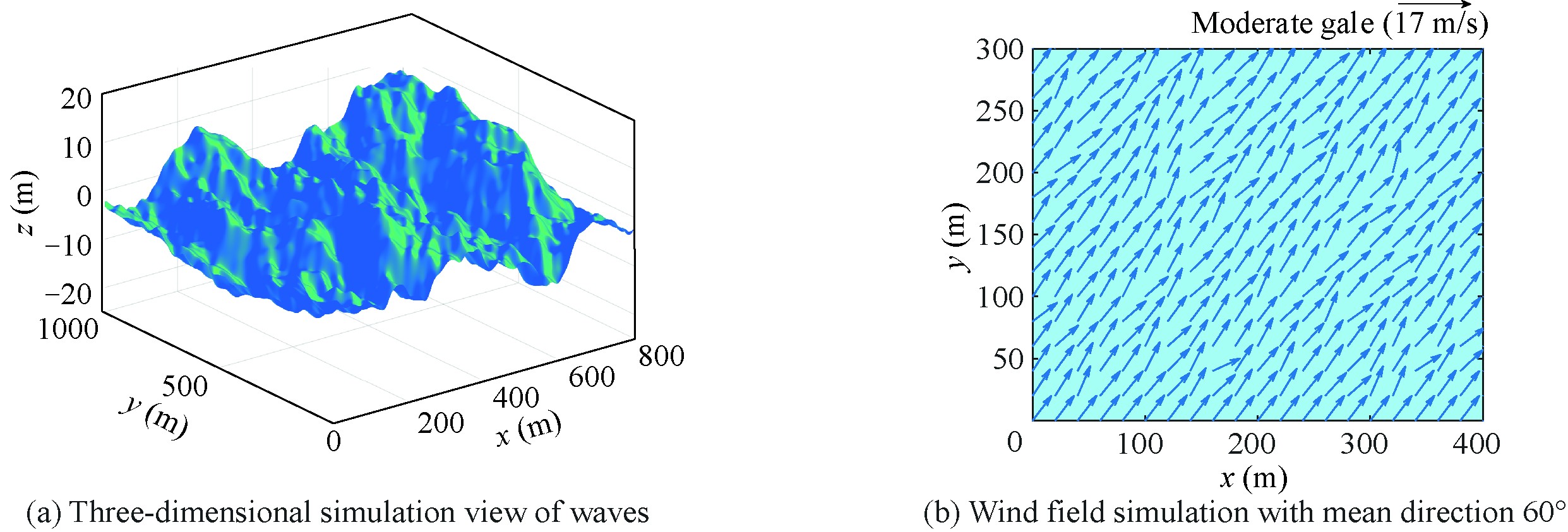
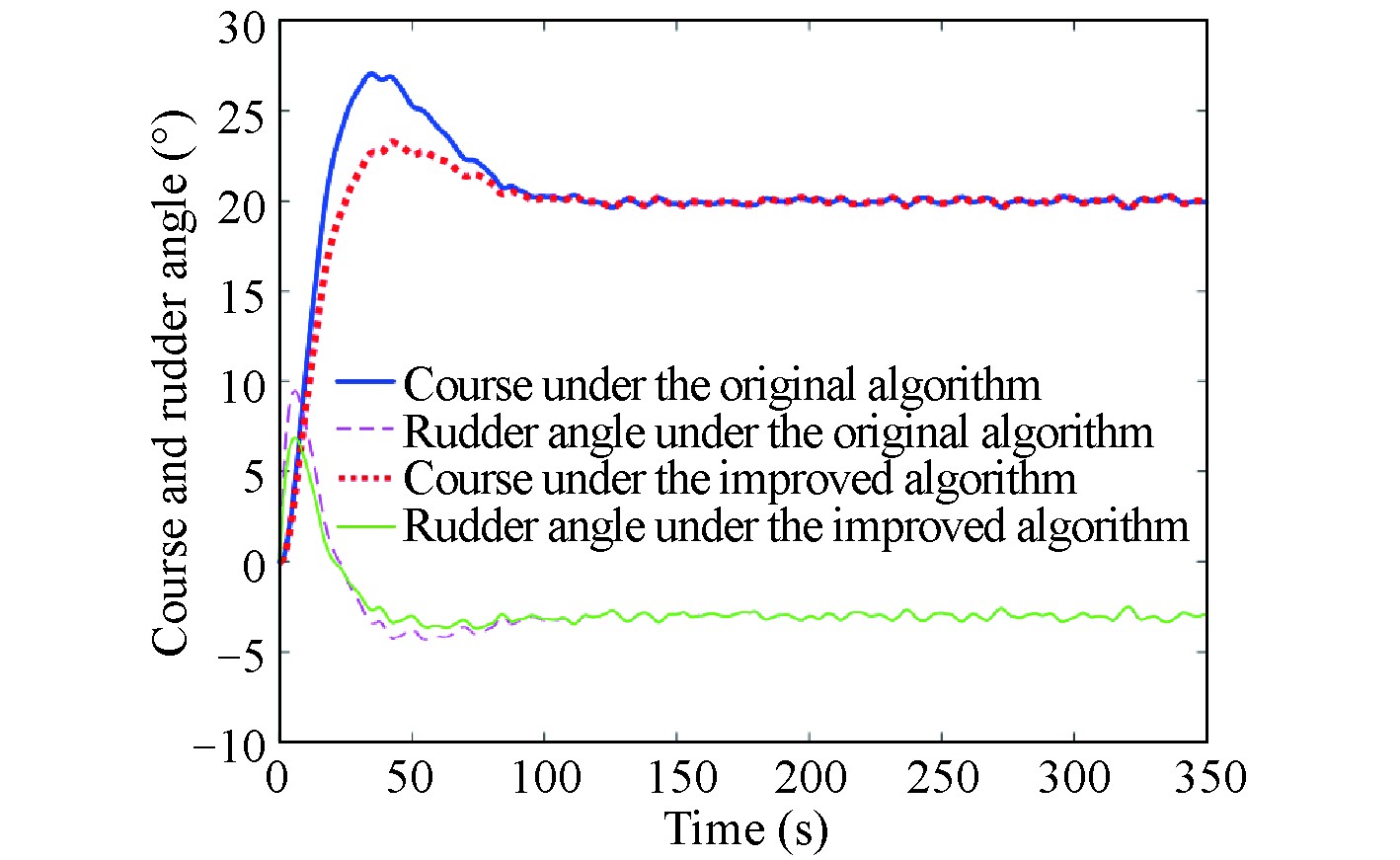
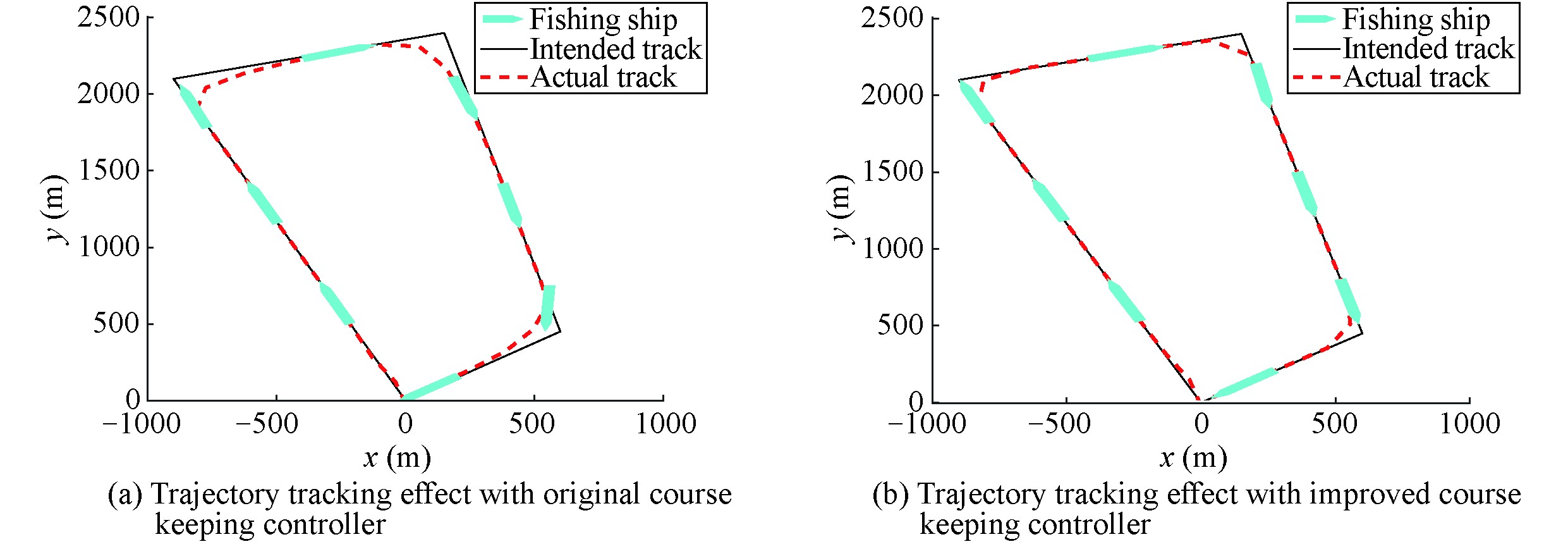
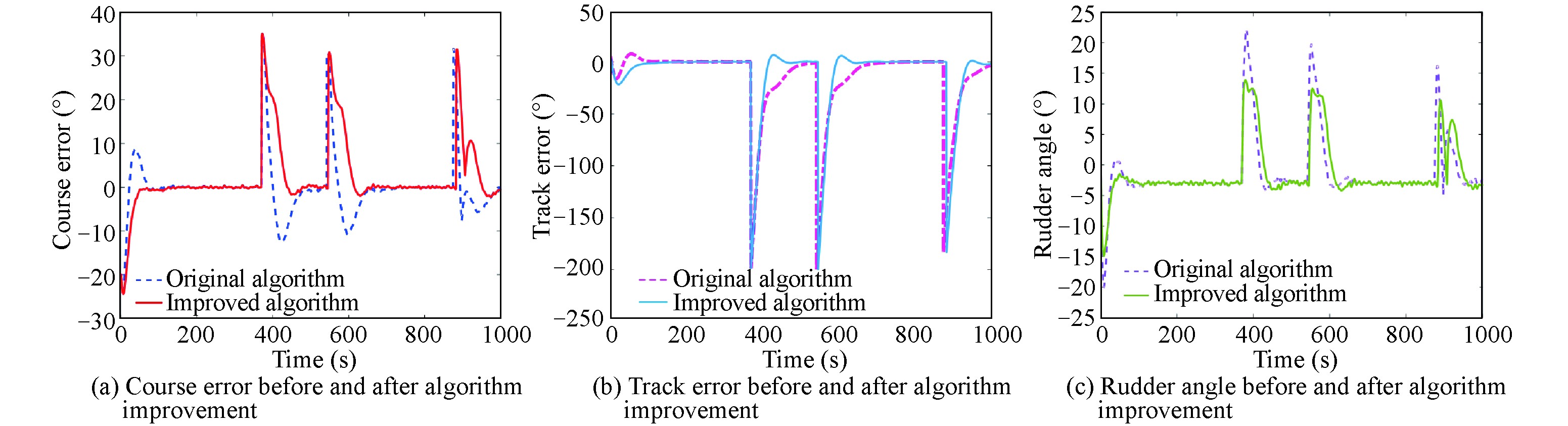
This paper proposes a separated trajectory tracking controller for fishing ships at sea state level 6 to solve the trajectory tracking problem of a fishing ship in a 6-level sea state, and to adapt to different working environments and safety requirements. The nonlinear feedback method is used to improve the closed-loop gain shaping algorithm. By introducing the sine function, the problem of excessive control energy of the system can be effectively solved. Moreover, an integral separation design is used to solve the influence of the integral term in conventional PID controllers on the transient performance of the system. In this paper, a common 32.98 m large fiberglass reinforced plastic (FRP) trawler is adopted for simulation research at the winds scale of Beaufort No. 7. The results show that the track error is smaller than 3.5 m. The method is safe, feasible, concise and effective and has popularization value in the direction of fishing ship trajectory tracking control. This method can be used to improve the level of informatization and intelligence of fishing ships.
This paper proposes a separated trajectory tracking controller for fishing ships at sea state level 6 to solve the trajectory tracking problem of a fishing ship in a 6-level sea state, and to adapt to different working environments and safety requirements. The nonlinear feedback method is used to improve the closed-loop gain shaping algorithm. By introducing the sine function, the problem of excessive control energy of the system can be effectively solved. Moreover, an integral separation design is used to solve the influence of the integral term in conventional PID controllers on the transient performance of the system. In this paper, a common 32.98 m large fiberglass reinforced plastic (FRP) trawler is adopted for simulation research at the winds scale of Beaufort No. 7. The results show that the track error is smaller than 3.5 m. The method is safe, feasible, concise and effective and has popularization value in the direction of fishing ship trajectory tracking control. This method can be used to improve the level of informatization and intelligence of fishing ships.
2025, 39(2)
:373-382.
doi: 10.1007/s13344-025-0029-2
Abstract:
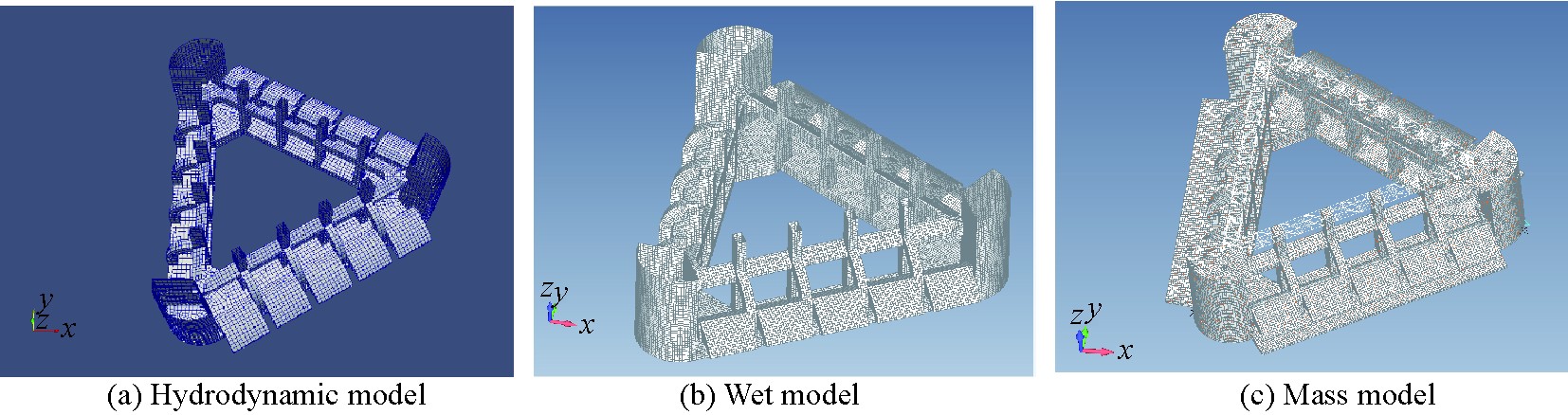
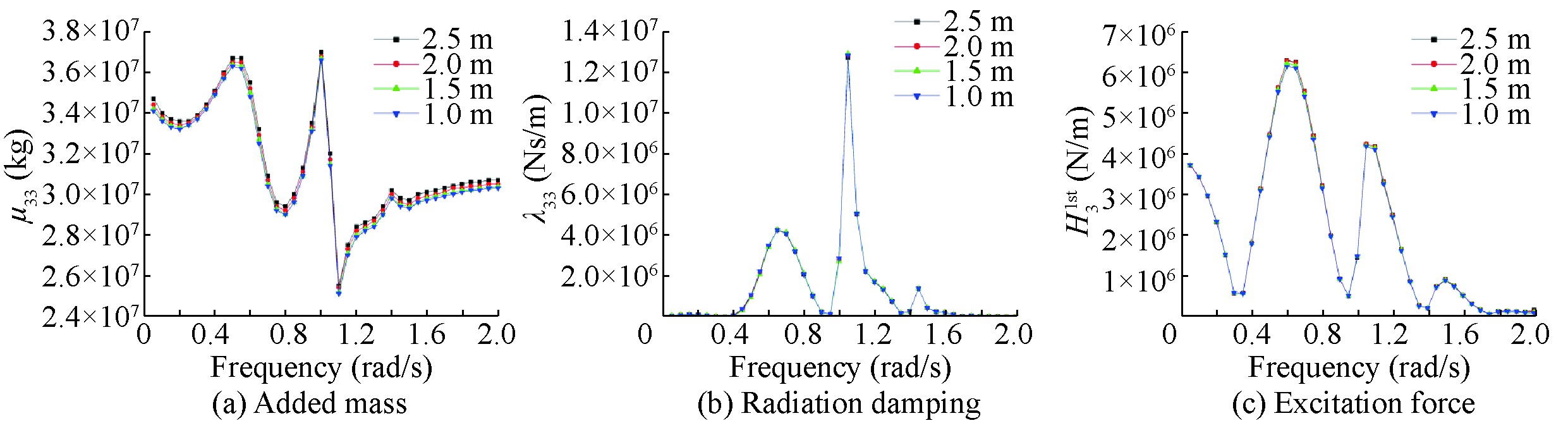
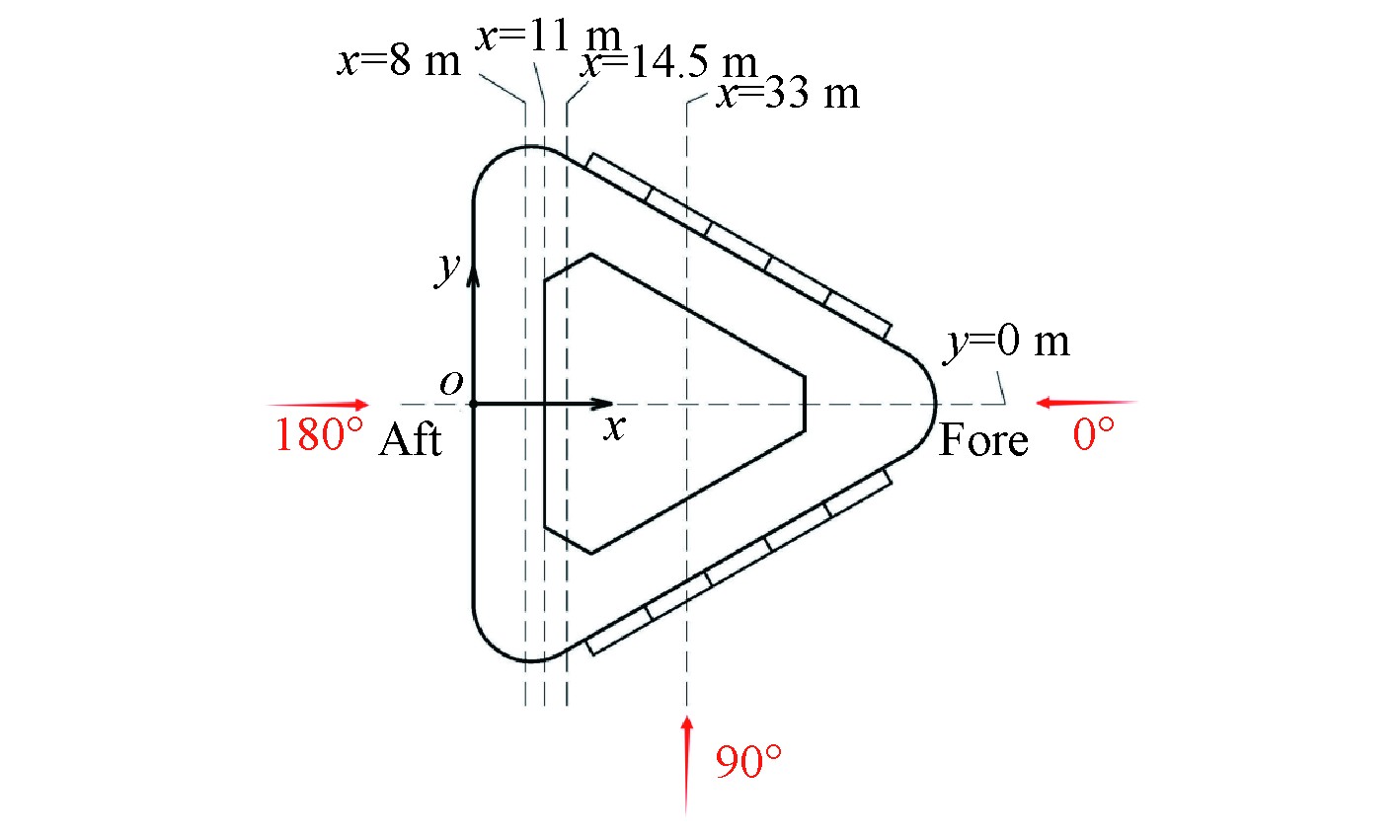
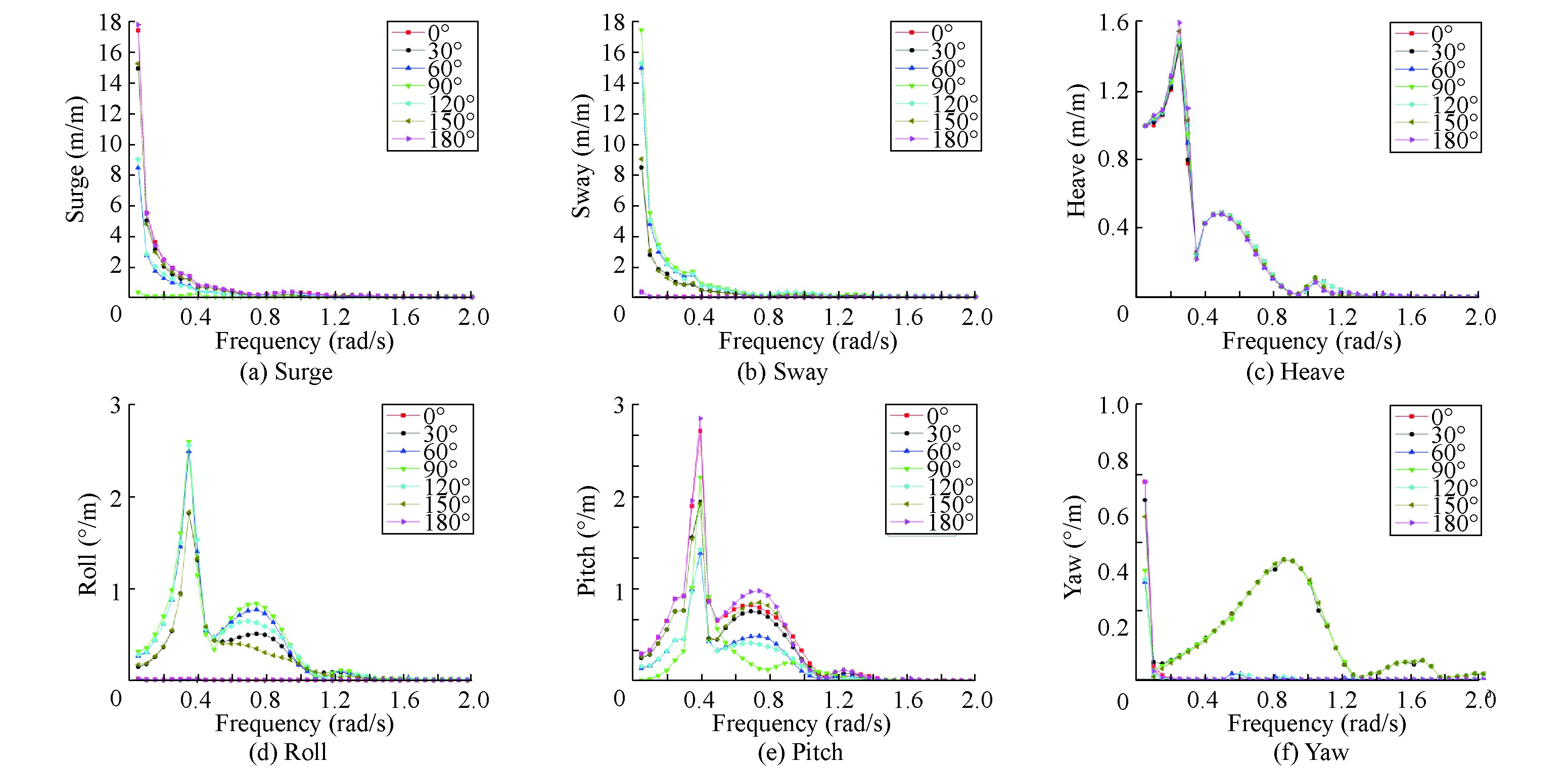
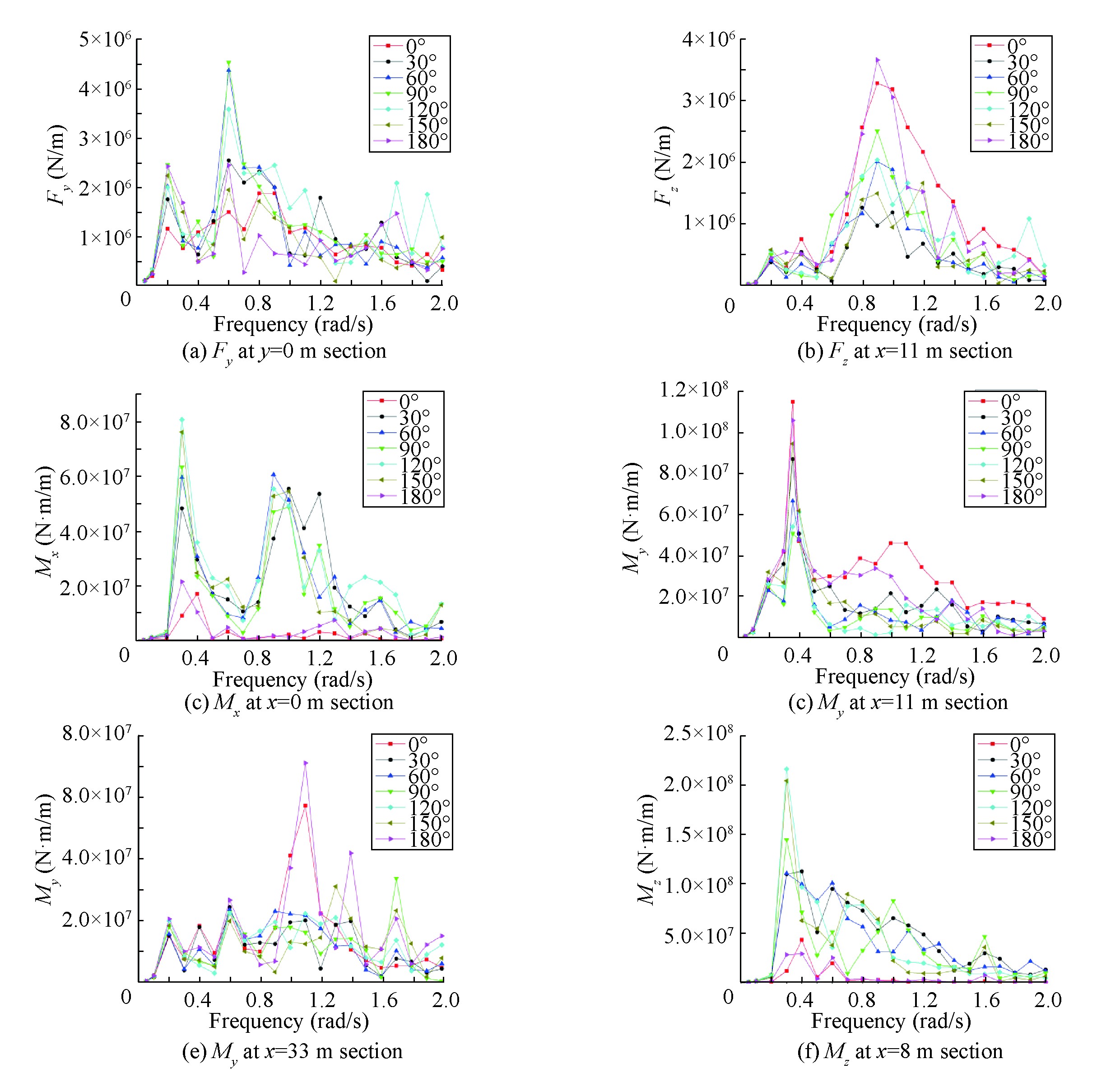
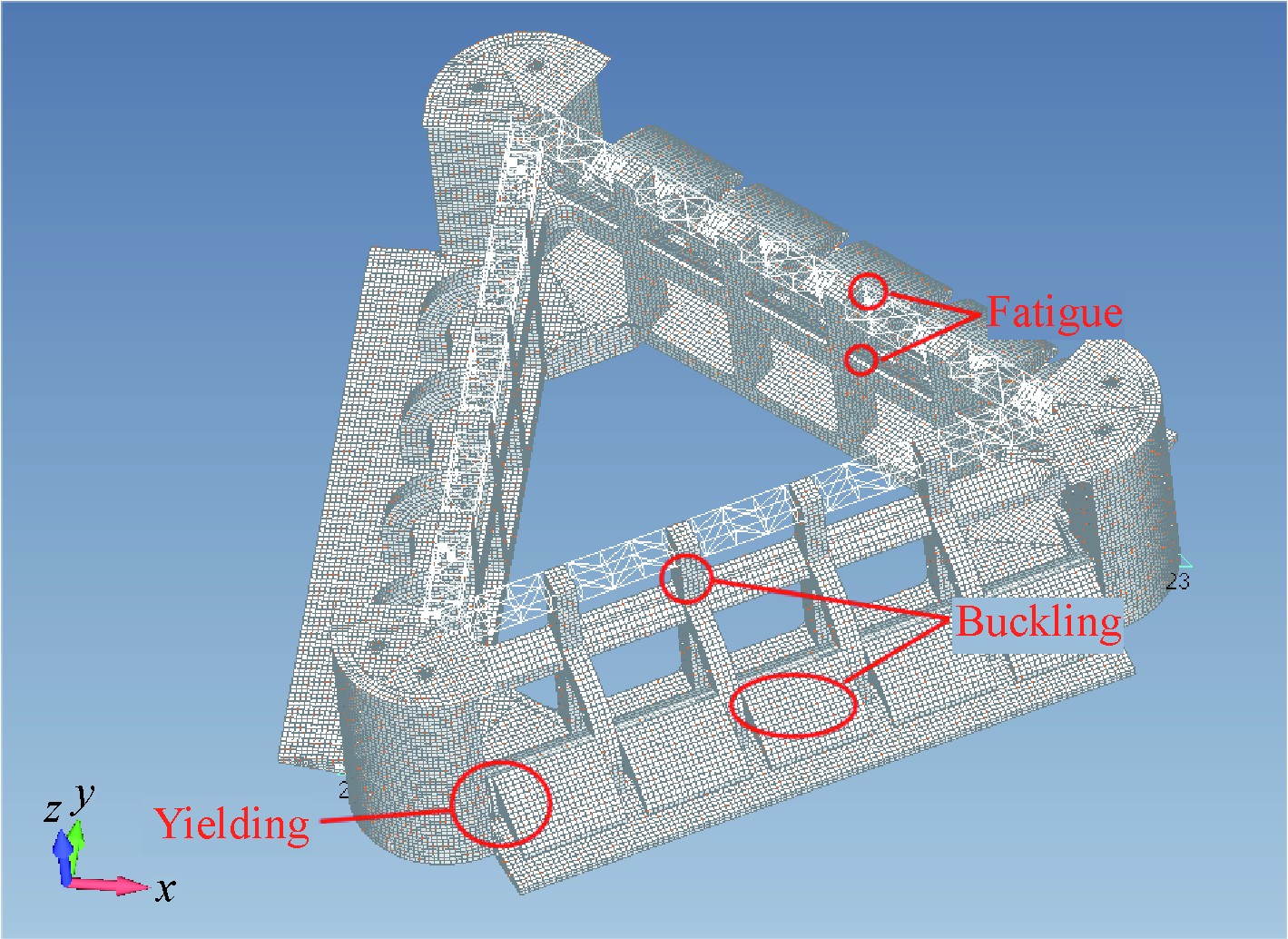
This paper presents a new type of triangular Sharp Eagle wave energy converter (WEC) platform. On the basis of the linear potential flow theory and the finite element analysis method, the hydrodynamic performance and structural response of the platform are studied, considering the actual platform motion and free surface rise under extreme sea states. First, the effects of the wave frequency and direction on the wave-induced loads and dynamic responses were examined. The motion at a wave direction angle of 0° is relatively low. On this basis, the angle constrained by the two sides of the Sharp Eagle floaters should be aligned with the main wave direction to avoid significant platform motion under extreme sea states. Additionally, the structural response of the platform, including the wave-absorbing floaters, is investigated. The results highlighted that the conditions or locations where yielding, buckling, and fatigue failures occur were different. In this context, the connection area of the Sharp Eagle floaters and platform is prone to yielding failure under oblique wave action, whereas the pontoon and side of the Sharp Eagle floaters are prone to buckling failure during significant vertical motion. Additionally, fatigue damage is most likely to occur at the connection between the middle column on both sides of the Sharp Eagle floaters and the pontoons. The findings of this paper revealed an intrinsic connection between wave-induced loads and the dynamic and structural responses of the platform, which provides a useful reference for the improved design of WECs.
This paper presents a new type of triangular Sharp Eagle wave energy converter (WEC) platform. On the basis of the linear potential flow theory and the finite element analysis method, the hydrodynamic performance and structural response of the platform are studied, considering the actual platform motion and free surface rise under extreme sea states. First, the effects of the wave frequency and direction on the wave-induced loads and dynamic responses were examined. The motion at a wave direction angle of 0° is relatively low. On this basis, the angle constrained by the two sides of the Sharp Eagle floaters should be aligned with the main wave direction to avoid significant platform motion under extreme sea states. Additionally, the structural response of the platform, including the wave-absorbing floaters, is investigated. The results highlighted that the conditions or locations where yielding, buckling, and fatigue failures occur were different. In this context, the connection area of the Sharp Eagle floaters and platform is prone to yielding failure under oblique wave action, whereas the pontoon and side of the Sharp Eagle floaters are prone to buckling failure during significant vertical motion. Additionally, fatigue damage is most likely to occur at the connection between the middle column on both sides of the Sharp Eagle floaters and the pontoons. The findings of this paper revealed an intrinsic connection between wave-induced loads and the dynamic and structural responses of the platform, which provides a useful reference for the improved design of WECs.

ScholarOne Manuscripts Log In
Current Issue
- Volume 39
- Issue 2
- April 2025
- Editor-in-Chief:
- Superintended by:
CHINA ASSOCIATION FOR SCIENCE AND TECHNOLOGY
- Sponsored by:
Chinese Ocean Engineering Society (COES)
- Edited by:
Nanjing Hydraulic Research Institute
Highlights
Stay up to Date
 Article abstracts by RSS
Article abstracts by RSS E-mail Alerts
E-mail Alerts