
2024 Vol.38(2)
column
Display Mode: |
2024, 38(2): 181-182.
doi: 10.1007/s13344-024-0015-0
Abstract:
2024, 38(2): 183-197.
doi: 10.1007/s13344-024-0016-z
Abstract:
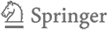
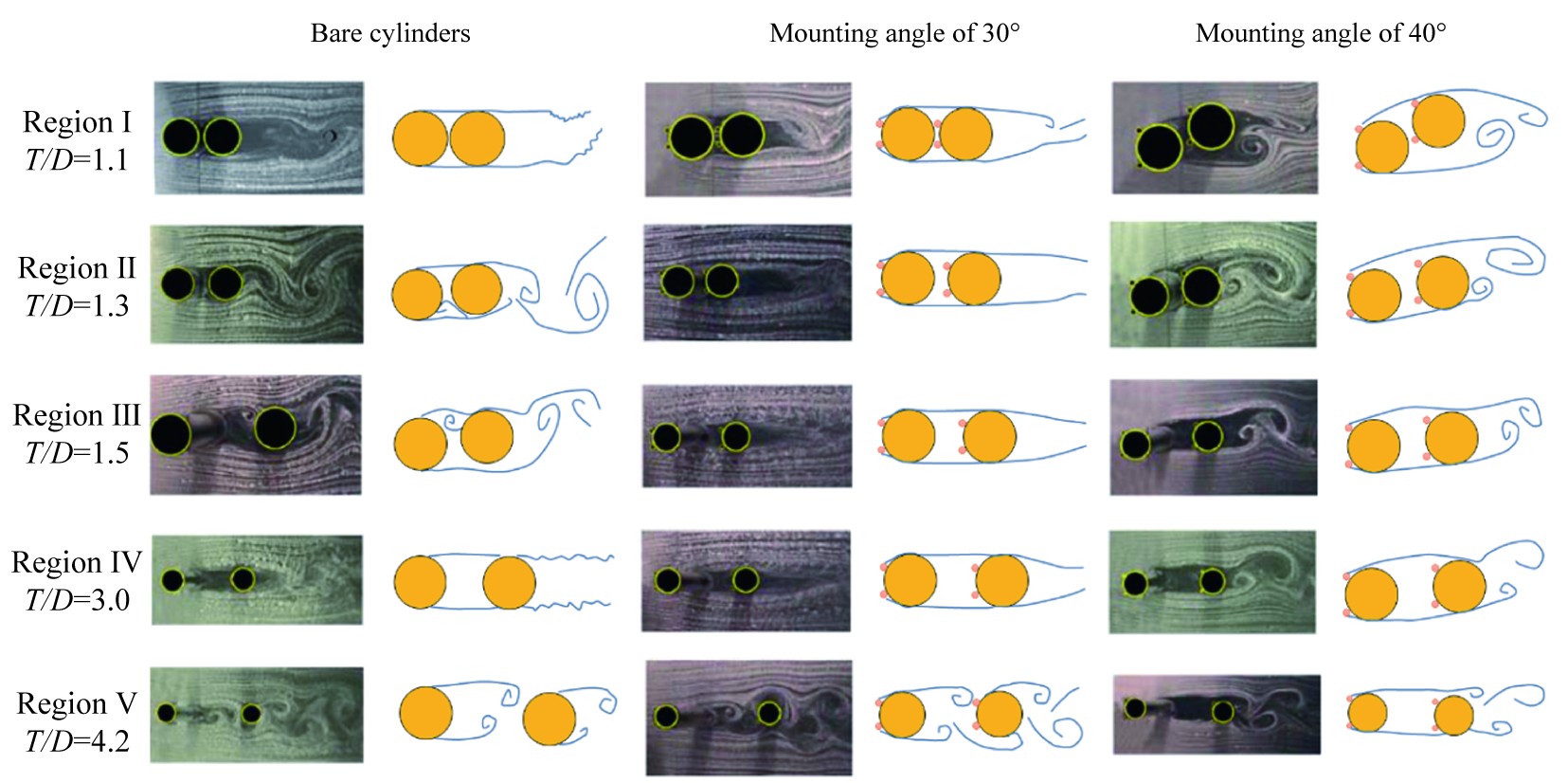
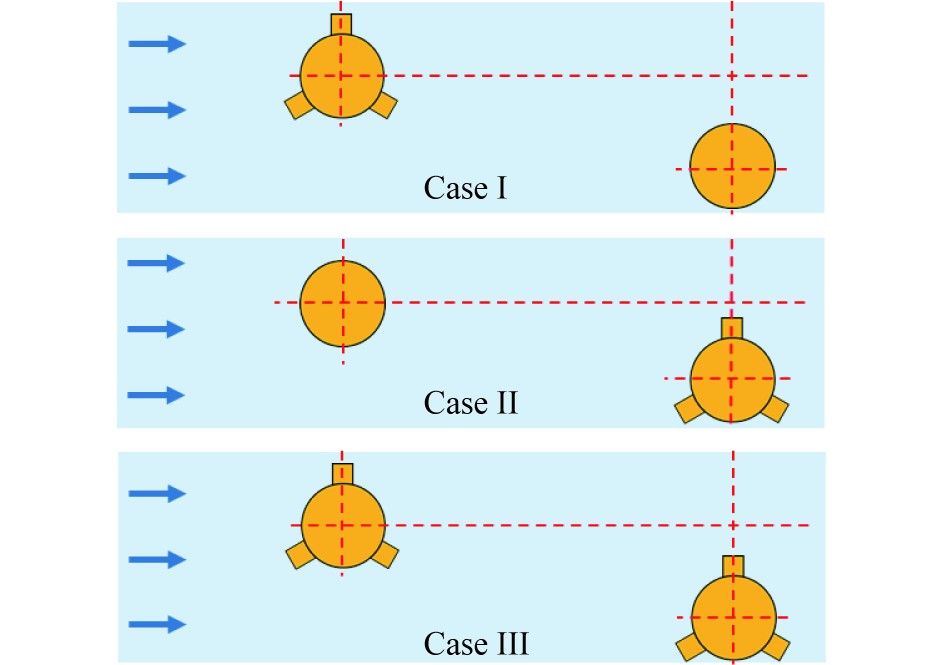
The fatigue damage caused by flow-induced vibration (FIV) is one of the major concerns for multiple cylindrical structures in many engineering applications. The FIV suppression is of great importance for the security of many cylindrical structures. Many active and passive control methods have been employed for the vibration suppression of an isolated cylinder undergoing vortex-induced vibrations (VIV). The FIV suppression methods are mainly extended to the multiple cylinders from the vibration control of the isolated cylinder. Due to the mutual interference between the multiple cylinders, the FIV mechanism is more complex than the VIV mechanism, which makes a great challenge for the FIV suppression. Some efforts have been devoted to vibration suppression of multiple cylinder systems undergoing FIV over the past two decades. The control methods, such as helical strakes, splitter plates, control rods and flexible sheets, are not always effective, depending on many influence factors, such as the spacing ratio, the arrangement geometrical shape, the flow velocity and the parameters of the vibration control devices. The FIV response, hydrodynamic features and wake patterns of the multiple cylinders equipped with vibration control devices are reviewed and summarized. The FIV suppression efficiency of the vibration control methods are analyzed and compared considering different influence factors. Further research on the FIV suppression of multiple cylinders is suggested to provide insight for the development of FIV control methods and promote engineering applications of FIV control methods.
The fatigue damage caused by flow-induced vibration (FIV) is one of the major concerns for multiple cylindrical structures in many engineering applications. The FIV suppression is of great importance for the security of many cylindrical structures. Many active and passive control methods have been employed for the vibration suppression of an isolated cylinder undergoing vortex-induced vibrations (VIV). The FIV suppression methods are mainly extended to the multiple cylinders from the vibration control of the isolated cylinder. Due to the mutual interference between the multiple cylinders, the FIV mechanism is more complex than the VIV mechanism, which makes a great challenge for the FIV suppression. Some efforts have been devoted to vibration suppression of multiple cylinder systems undergoing FIV over the past two decades. The control methods, such as helical strakes, splitter plates, control rods and flexible sheets, are not always effective, depending on many influence factors, such as the spacing ratio, the arrangement geometrical shape, the flow velocity and the parameters of the vibration control devices. The FIV response, hydrodynamic features and wake patterns of the multiple cylinders equipped with vibration control devices are reviewed and summarized. The FIV suppression efficiency of the vibration control methods are analyzed and compared considering different influence factors. Further research on the FIV suppression of multiple cylinders is suggested to provide insight for the development of FIV control methods and promote engineering applications of FIV control methods.







Qi-bing WU,
Bao-ping CAI,
Hong-yan FAN,
Guan-nan WANG,
Xi RAO,
Wei-feng GE,
Xiao-yan SHAO,
Yong-hong LIU
2024, 38(2): 198-209.
doi: 10.1007/s13344-024-0017-y
Abstract:
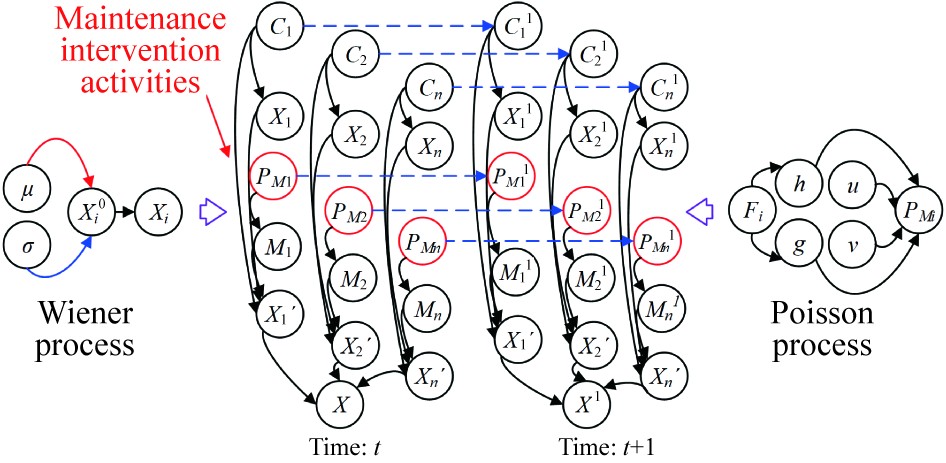
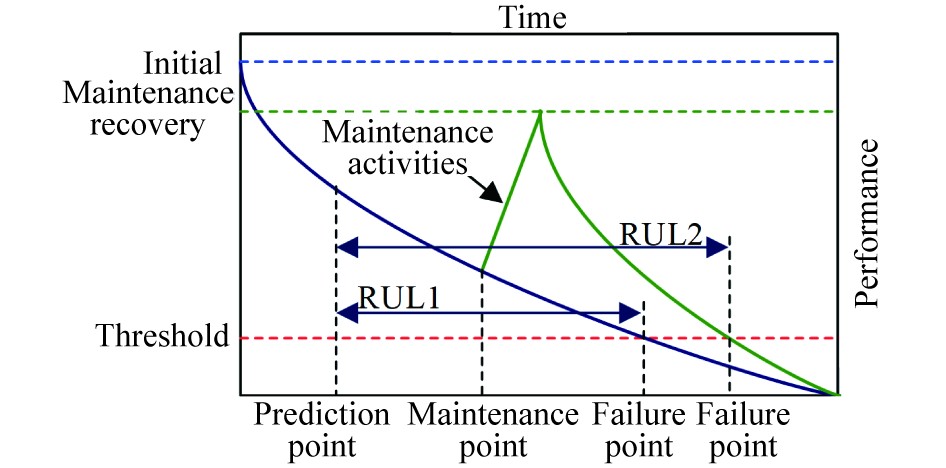
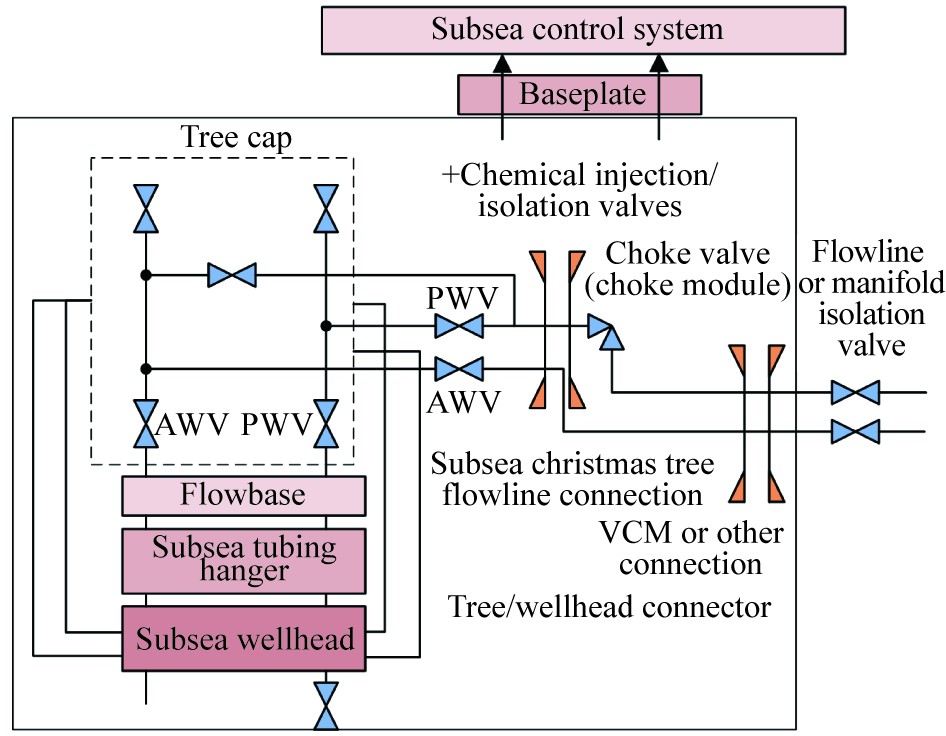
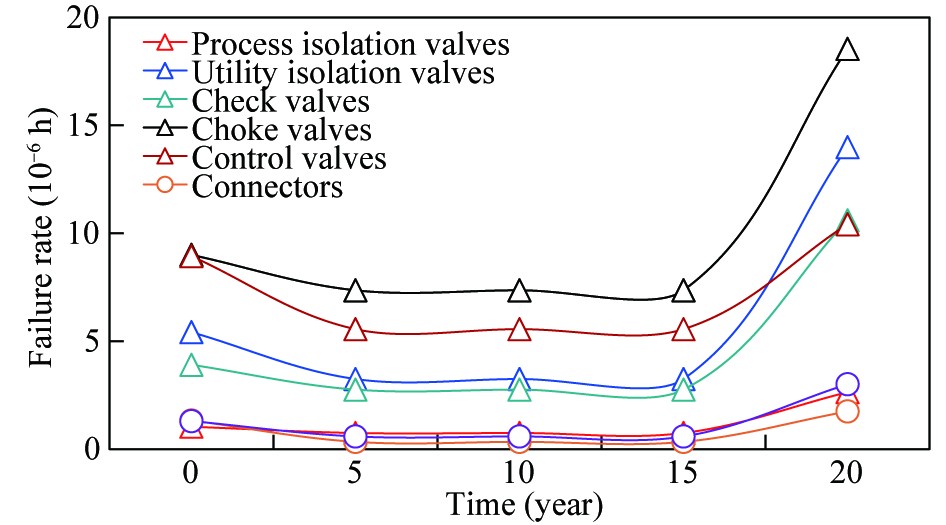
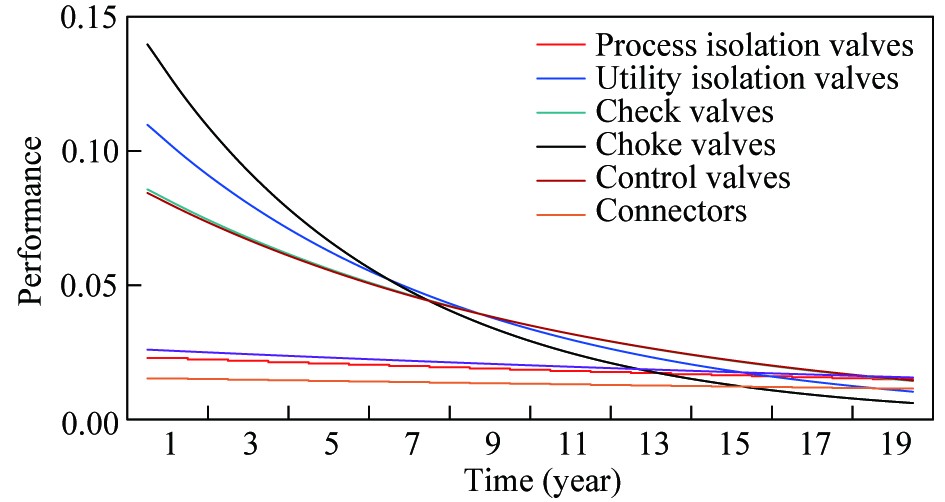
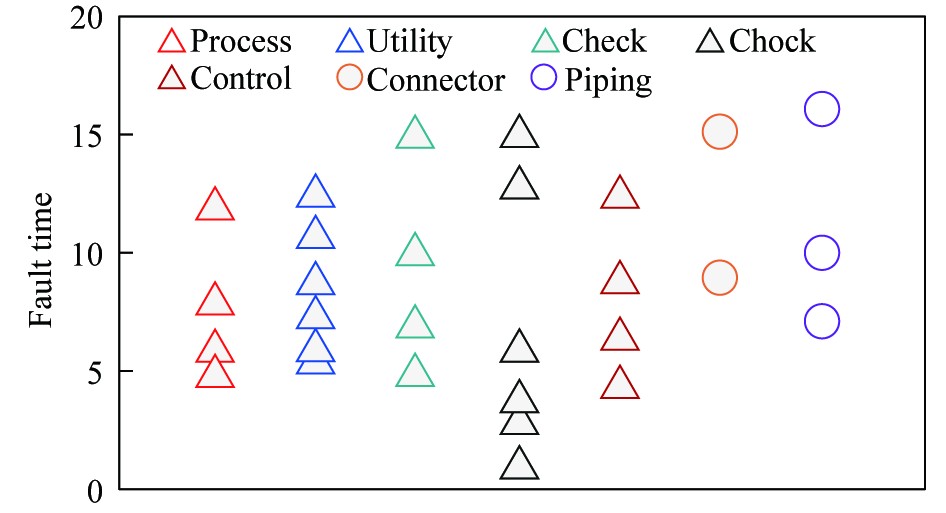
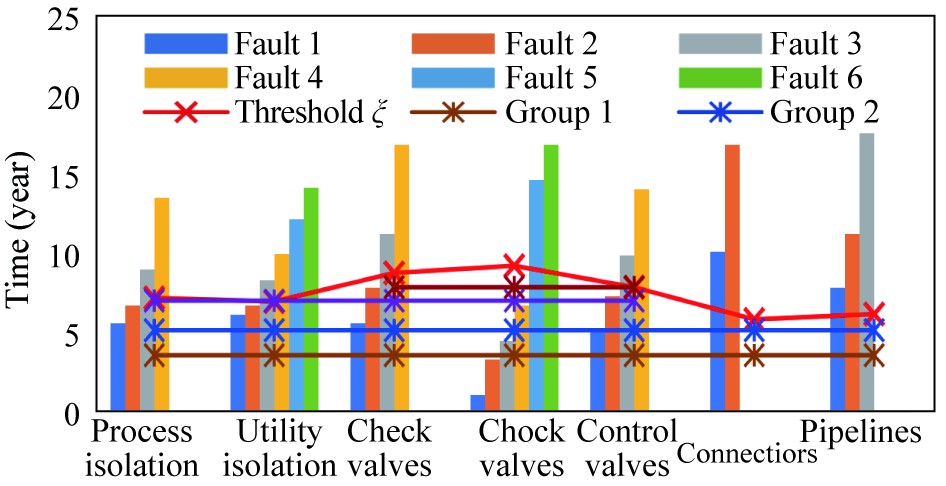
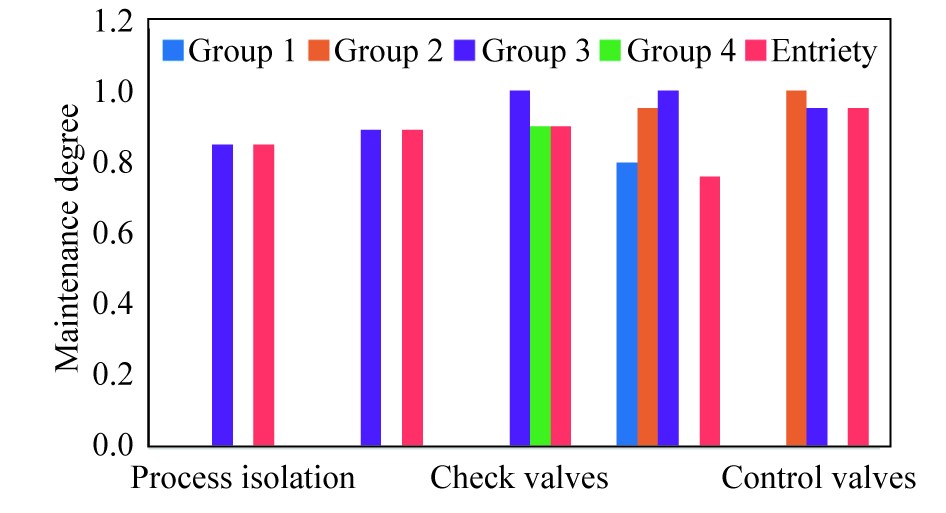
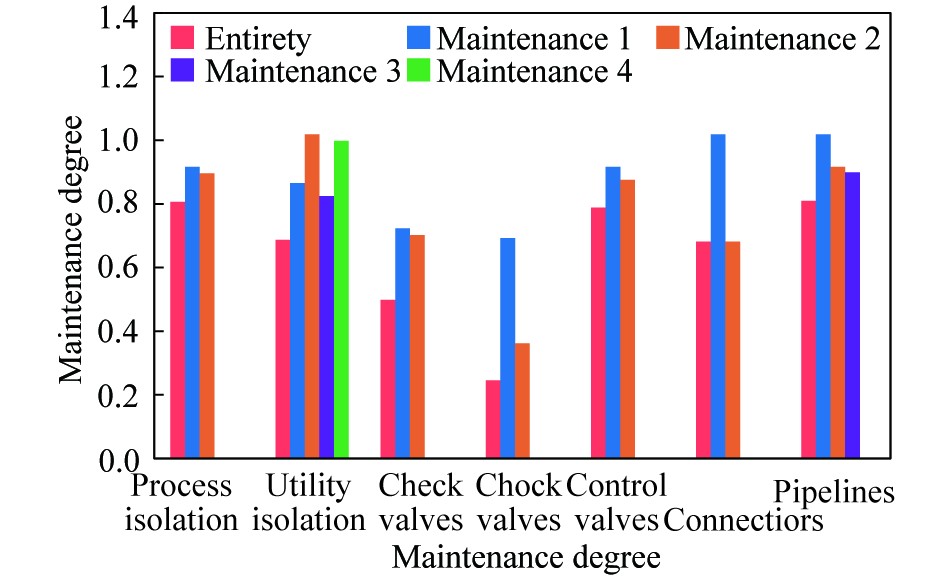
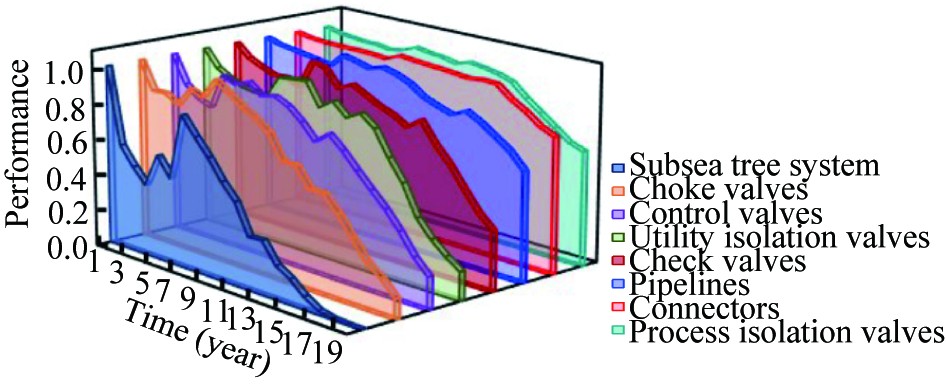
Maintenance is an important technical measure to maintain and restore the performance status of equipment and ensure the safety of the production process in industrial production, and is an indispensable part of prediction and health management. However, most of the existing remaining useful life (RUL) prediction methods assume that there is no maintenance or only perfect maintenance during the whole life cycle; thus, the predicted RUL value of the system is obviously lower than its actual operating value. The complex environment of the system further increases the difficulty of maintenance, and its maintenance nodes and maintenance degree are limited by the construction period and working conditions, which increases the difficulty of RUL prediction. An RUL prediction method for a multi-omponent system based on the Wiener process considering maintenance is proposed. The performance degradation model of components is established by a dynamic Bayesian network as the initial model, which solves the uncertainty of insufficient data problems. Based on the experience of experts, the degree of degradation is divided according to Poisson process simulation random failure, and different maintenance strategies are used to estimate a variety of condition maintenance factors. An example of a subsea tree system is given to verify the effectiveness of the proposed method.
Maintenance is an important technical measure to maintain and restore the performance status of equipment and ensure the safety of the production process in industrial production, and is an indispensable part of prediction and health management. However, most of the existing remaining useful life (RUL) prediction methods assume that there is no maintenance or only perfect maintenance during the whole life cycle; thus, the predicted RUL value of the system is obviously lower than its actual operating value. The complex environment of the system further increases the difficulty of maintenance, and its maintenance nodes and maintenance degree are limited by the construction period and working conditions, which increases the difficulty of RUL prediction. An RUL prediction method for a multi-omponent system based on the Wiener process considering maintenance is proposed. The performance degradation model of components is established by a dynamic Bayesian network as the initial model, which solves the uncertainty of insufficient data problems. Based on the experience of experts, the degree of degradation is divided according to Poisson process simulation random failure, and different maintenance strategies are used to estimate a variety of condition maintenance factors. An example of a subsea tree system is given to verify the effectiveness of the proposed method.






2024, 38(2): 210-220.
doi: 10.1007/s13344-024-0018-x
Abstract:
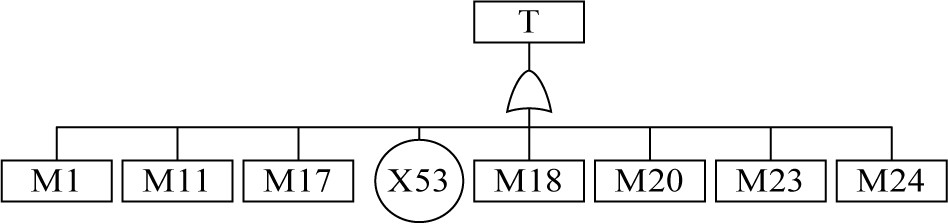
Due to the high potential risk and many influencing factors of subsea horizontal X-tree installation, to guarantee the successful completion of sea trials of domestic subsea horizontal X-trees, this paper established a modular risk evaluation model based on a fuzzy fault tree. First, through the analysis of the main process oftree down and combining the Offshore & Onshore Reliability Data (OREDA) failure statistics and the operation procedure and the data provided by the job, the fault tree model of risk analysis of the tree down installation was established. Then, by introducing the natural language of expert comprehensive evaluation and combining fuzzy principles, quantitative analysis was carried out, and the fuzzy number was used to calculate the failure probability of a basic event and the occurrence probability of a top event. Finally, through a sensitivity analysis of basic events, the basic events of top events significantly affected were determined, and risk control and prevention measures for the corresponding high-risk factors were proposed for subsea horizontal X-tree down installation.
Due to the high potential risk and many influencing factors of subsea horizontal X-tree installation, to guarantee the successful completion of sea trials of domestic subsea horizontal X-trees, this paper established a modular risk evaluation model based on a fuzzy fault tree. First, through the analysis of the main process oftree down and combining the Offshore & Onshore Reliability Data (OREDA) failure statistics and the operation procedure and the data provided by the job, the fault tree model of risk analysis of the tree down installation was established. Then, by introducing the natural language of expert comprehensive evaluation and combining fuzzy principles, quantitative analysis was carried out, and the fuzzy number was used to calculate the failure probability of a basic event and the occurrence probability of a top event. Finally, through a sensitivity analysis of basic events, the basic events of top events significantly affected were determined, and risk control and prevention measures for the corresponding high-risk factors were proposed for subsea horizontal X-tree down installation.






2024, 38(2): 221-232.
doi: 10.1007/s13344-024-0019-9
Abstract:
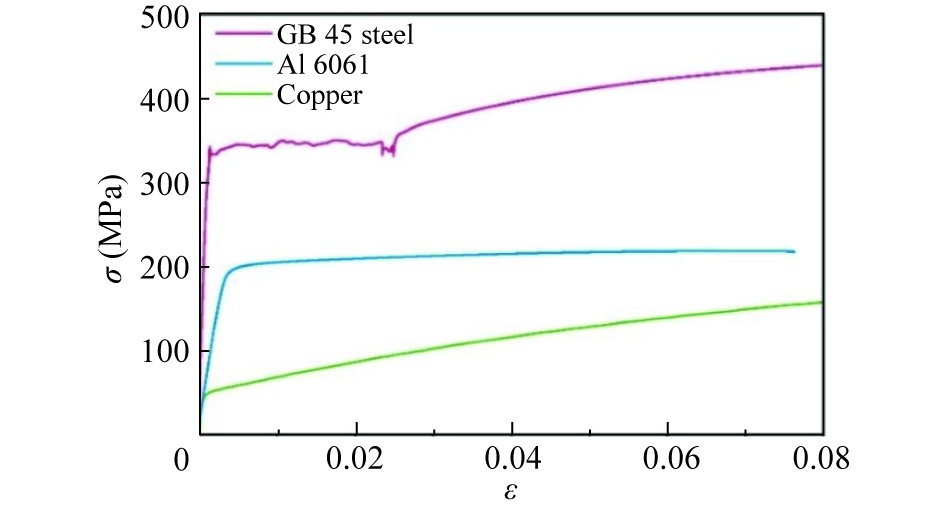
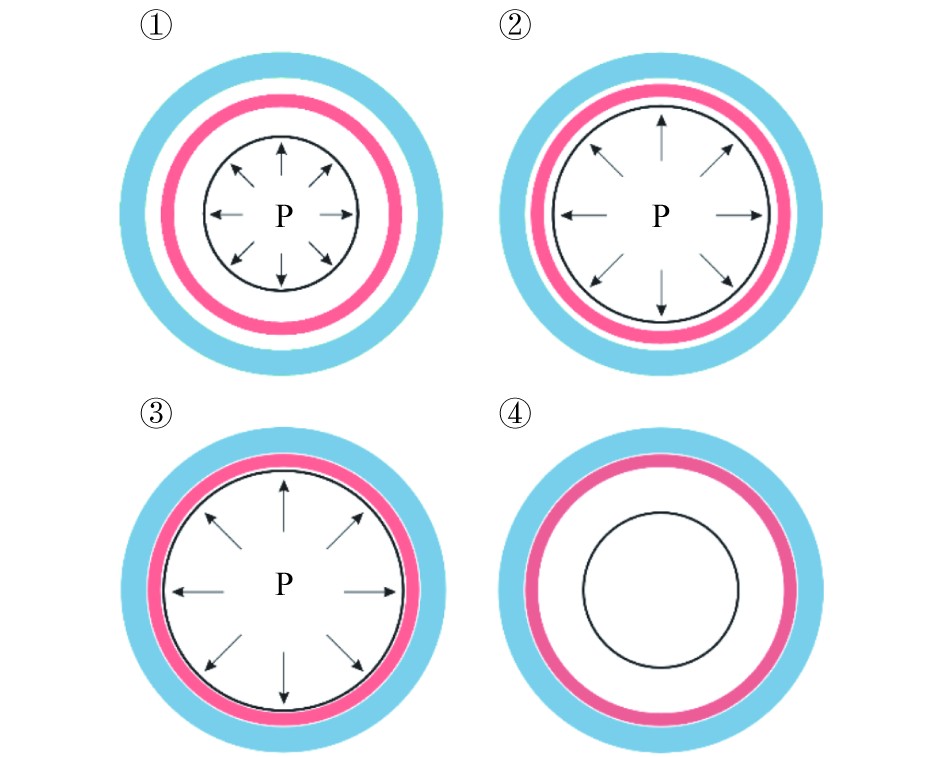
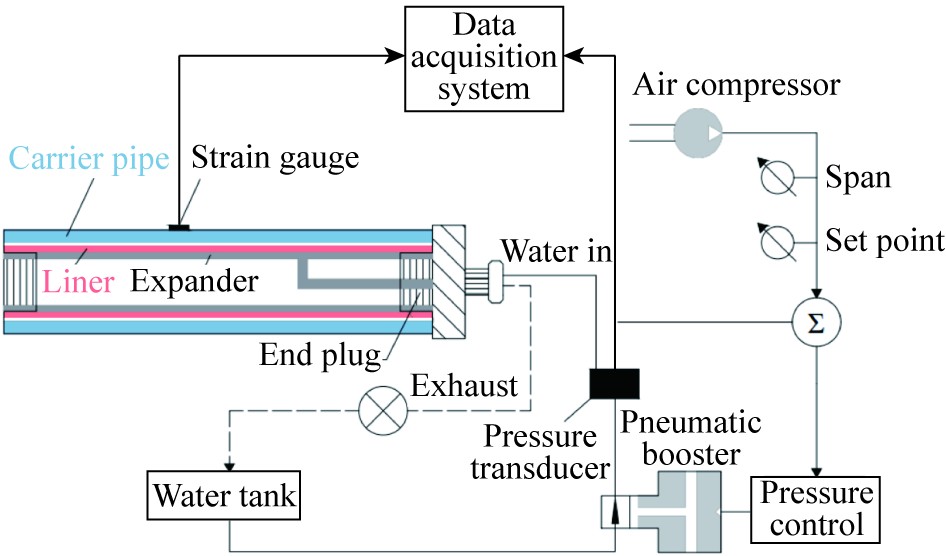
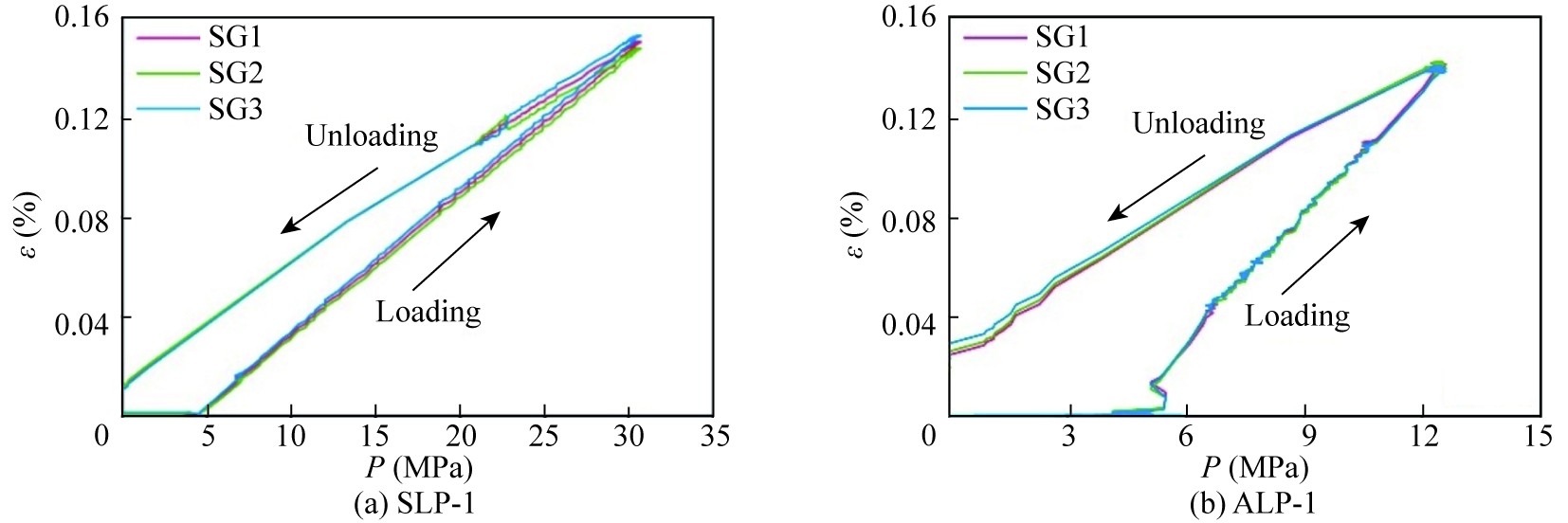
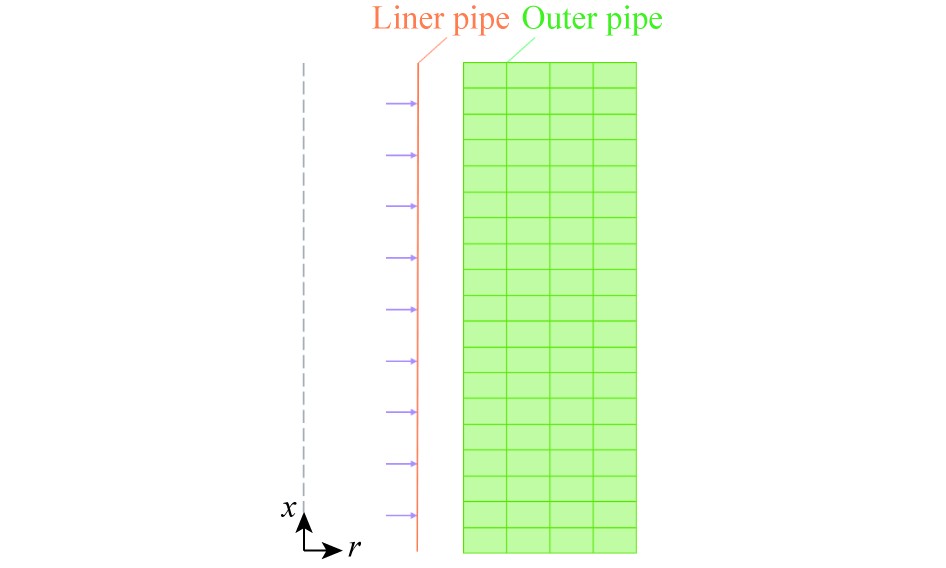
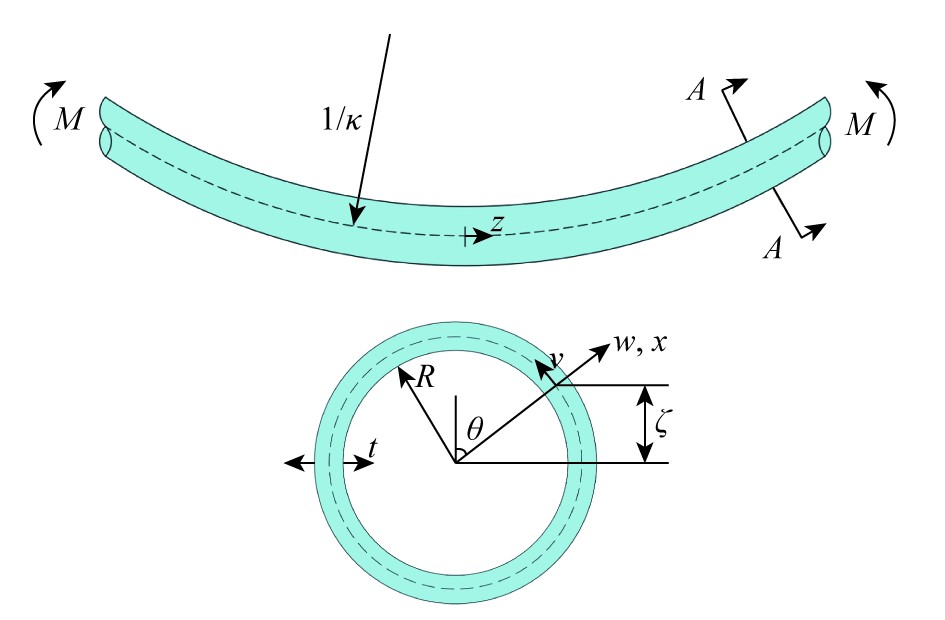
Mechanically lined pipe (MLP) is often used for offshore oil and gas transport because of its low cost and corrosion resistance. During installation and operation, the pipe may undergo severe bending deformation, which causes the liner to separate from the outer pipe and buckles, affecting the stability of the whole line. In this paper, the buckling response of MLP subjected to bending is investigated to clarify its bending characteristics by employing both experiments, numerical simulation, as theoretical methods. Two types of MLPs were manufactured with GB 45 carbon steel (SLP) and Al 6061 (ALP) used as the outer pipe material, respectively. The hydraulic expansion and bending experiments of small-scale MLPs are conducted. In addition to the ovalized shape of the cross-section for the SLP specimens, the copper liner was found to wrinkle on the compressive side. In contrast, the liner of ALP remains intact without developing any wrinkling and collapse mode. In addition, a dedicated numerical framework and theoretical models were also established. It was found both the manufacturing and bending responses of the MLP can be well reproduced, and the predicted maximum moment and critical curvatures are in good agreement with the experimental results.
Mechanically lined pipe (MLP) is often used for offshore oil and gas transport because of its low cost and corrosion resistance. During installation and operation, the pipe may undergo severe bending deformation, which causes the liner to separate from the outer pipe and buckles, affecting the stability of the whole line. In this paper, the buckling response of MLP subjected to bending is investigated to clarify its bending characteristics by employing both experiments, numerical simulation, as theoretical methods. Two types of MLPs were manufactured with GB 45 carbon steel (SLP) and Al 6061 (ALP) used as the outer pipe material, respectively. The hydraulic expansion and bending experiments of small-scale MLPs are conducted. In addition to the ovalized shape of the cross-section for the SLP specimens, the copper liner was found to wrinkle on the compressive side. In contrast, the liner of ALP remains intact without developing any wrinkling and collapse mode. In addition, a dedicated numerical framework and theoretical models were also established. It was found both the manufacturing and bending responses of the MLP can be well reproduced, and the predicted maximum moment and critical curvatures are in good agreement with the experimental results.














2024, 38(2): 233-246.
doi: 10.1007/s13344-024-0020-3
Abstract:
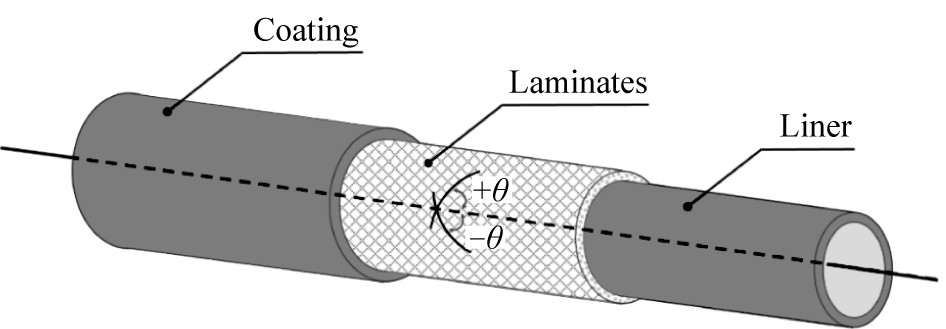
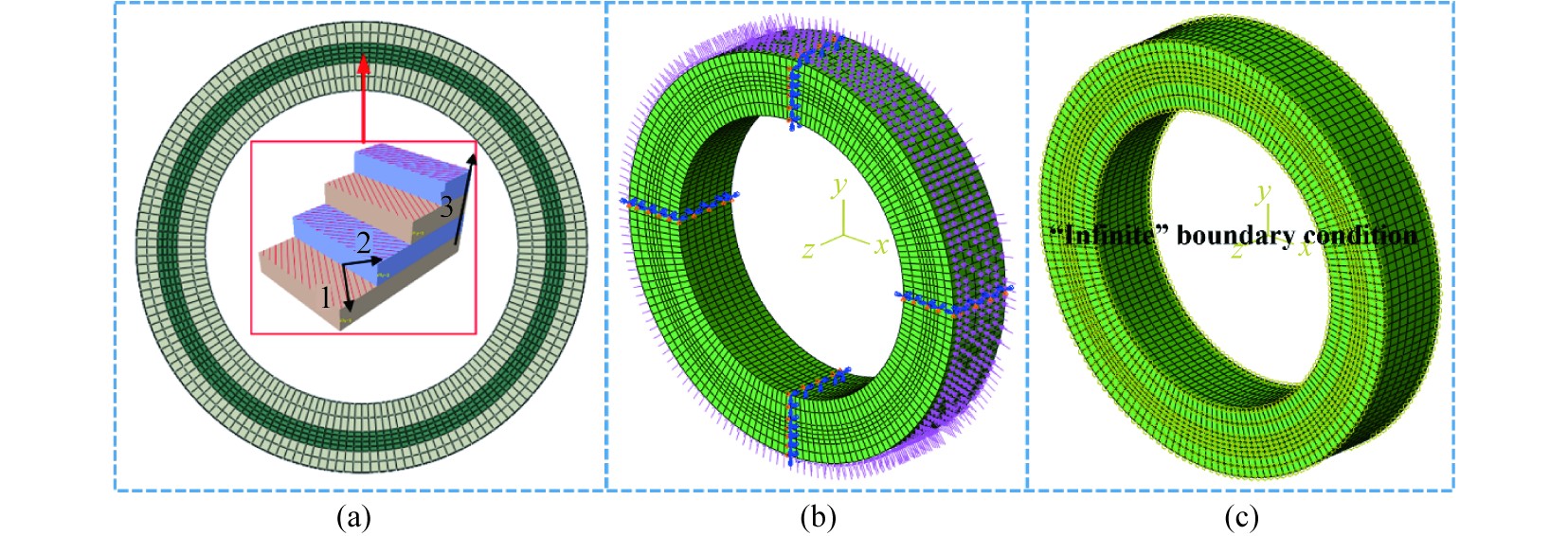
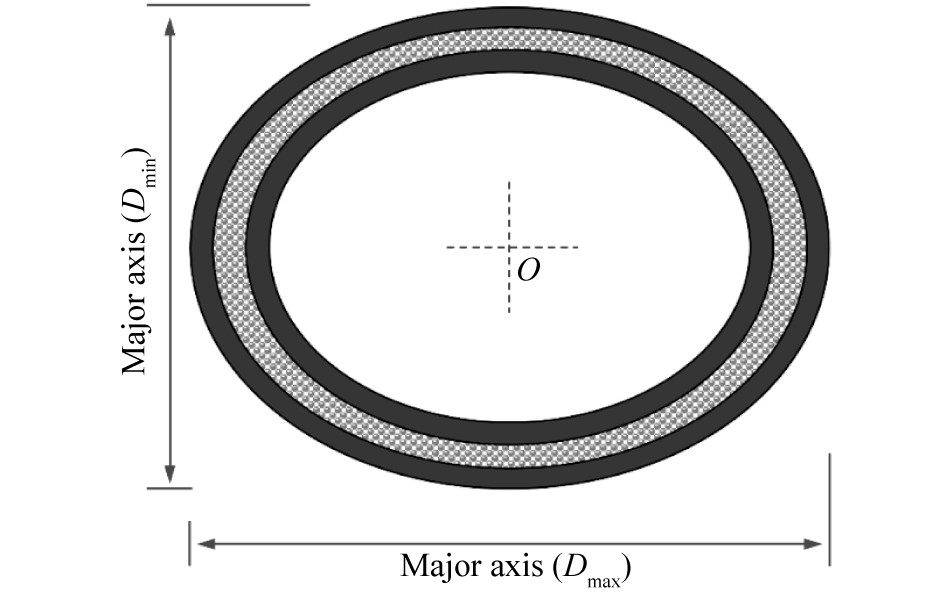
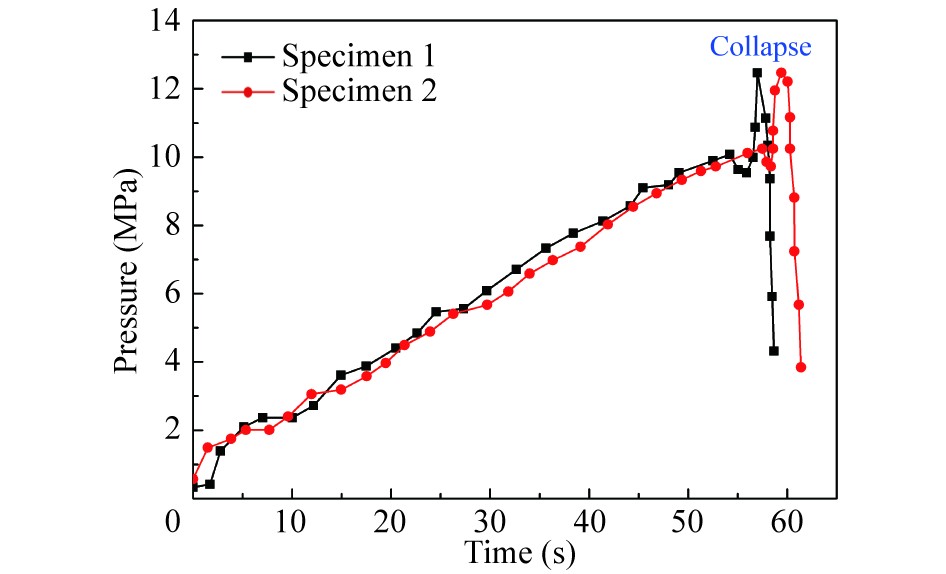
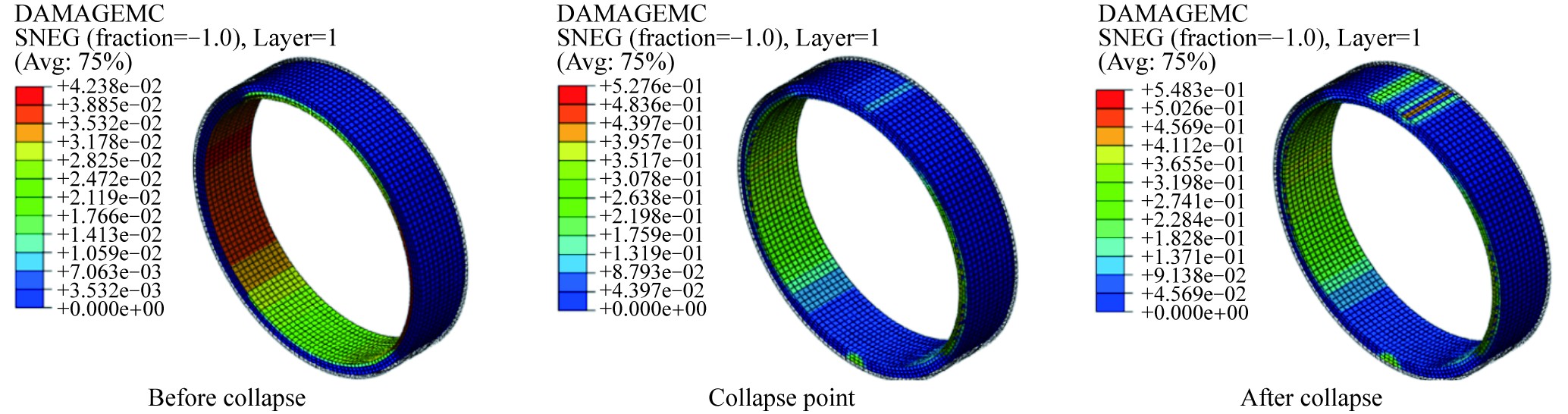
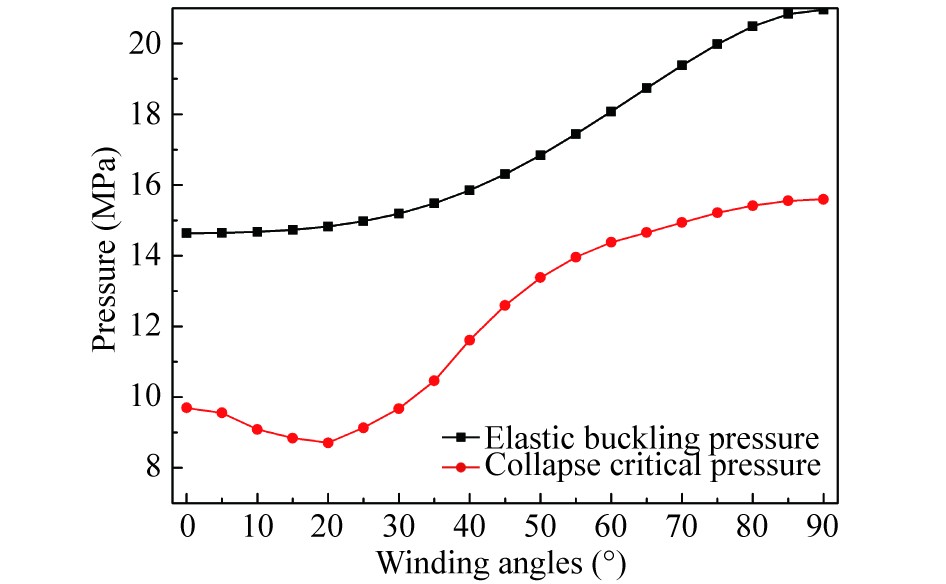
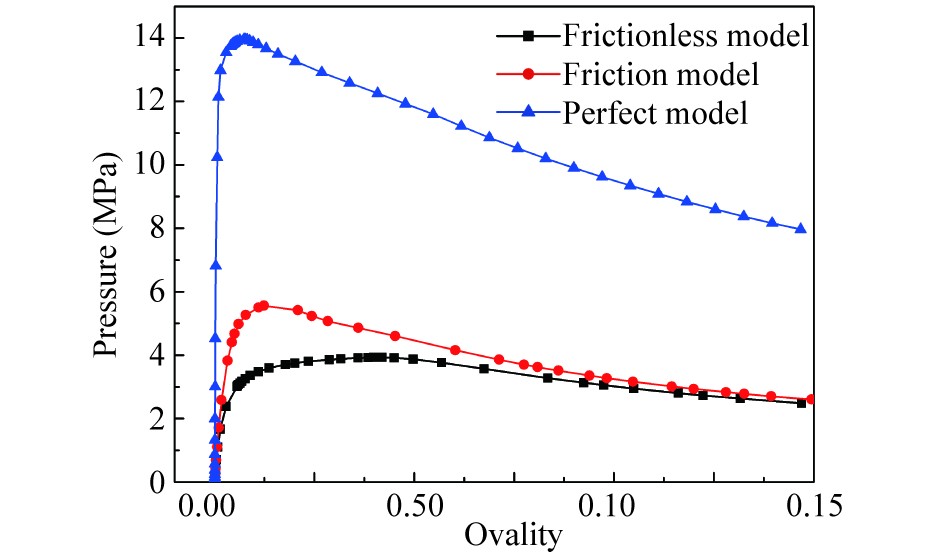
The collapse pressure is a key parameter when RTPs are applied in harsh deep-water environments. To investigate the collapse of RTPs, numerical simulations and hydrostatic pressure tests are conducted. For the numerical simulations, the eigenvalue analysis and Riks analysis are combined, in which the Hashin failure criterion and fracture energy stiffness degradation model are used to simulate the progressive failure of composites, and the “infinite” boundary conditions are applied to eliminate the boundary effects. As for the hydrostatic pressure tests, RTP specimens were placed in a hydrostatic chamber after filled with water. It has been observed that the cross-section of the middle part collapses when it reaches the maximum pressure. The collapse pressure obtained from the numerical simulations agrees well with that in the experiment. Meanwhile, the applicability of NASA SP-8007 formula on the collapse pressure prediction was also discussed. It has a relatively greater difference because of the ignorance of the progressive failure of composites. For the parametric study, it is found that RTPs have much higher first-ply-failure pressure when the winding angles are between 50° and 70°. Besides, the effect of debonding and initial ovality, and the contribution of the liner and coating are also discussed.
The collapse pressure is a key parameter when RTPs are applied in harsh deep-water environments. To investigate the collapse of RTPs, numerical simulations and hydrostatic pressure tests are conducted. For the numerical simulations, the eigenvalue analysis and Riks analysis are combined, in which the Hashin failure criterion and fracture energy stiffness degradation model are used to simulate the progressive failure of composites, and the “infinite” boundary conditions are applied to eliminate the boundary effects. As for the hydrostatic pressure tests, RTP specimens were placed in a hydrostatic chamber after filled with water. It has been observed that the cross-section of the middle part collapses when it reaches the maximum pressure. The collapse pressure obtained from the numerical simulations agrees well with that in the experiment. Meanwhile, the applicability of NASA SP-8007 formula on the collapse pressure prediction was also discussed. It has a relatively greater difference because of the ignorance of the progressive failure of composites. For the parametric study, it is found that RTPs have much higher first-ply-failure pressure when the winding angles are between 50° and 70°. Besides, the effect of debonding and initial ovality, and the contribution of the liner and coating are also discussed.










2024, 38(2): 247-254.
doi: 10.1007/s13344-024-0021-2
Abstract:
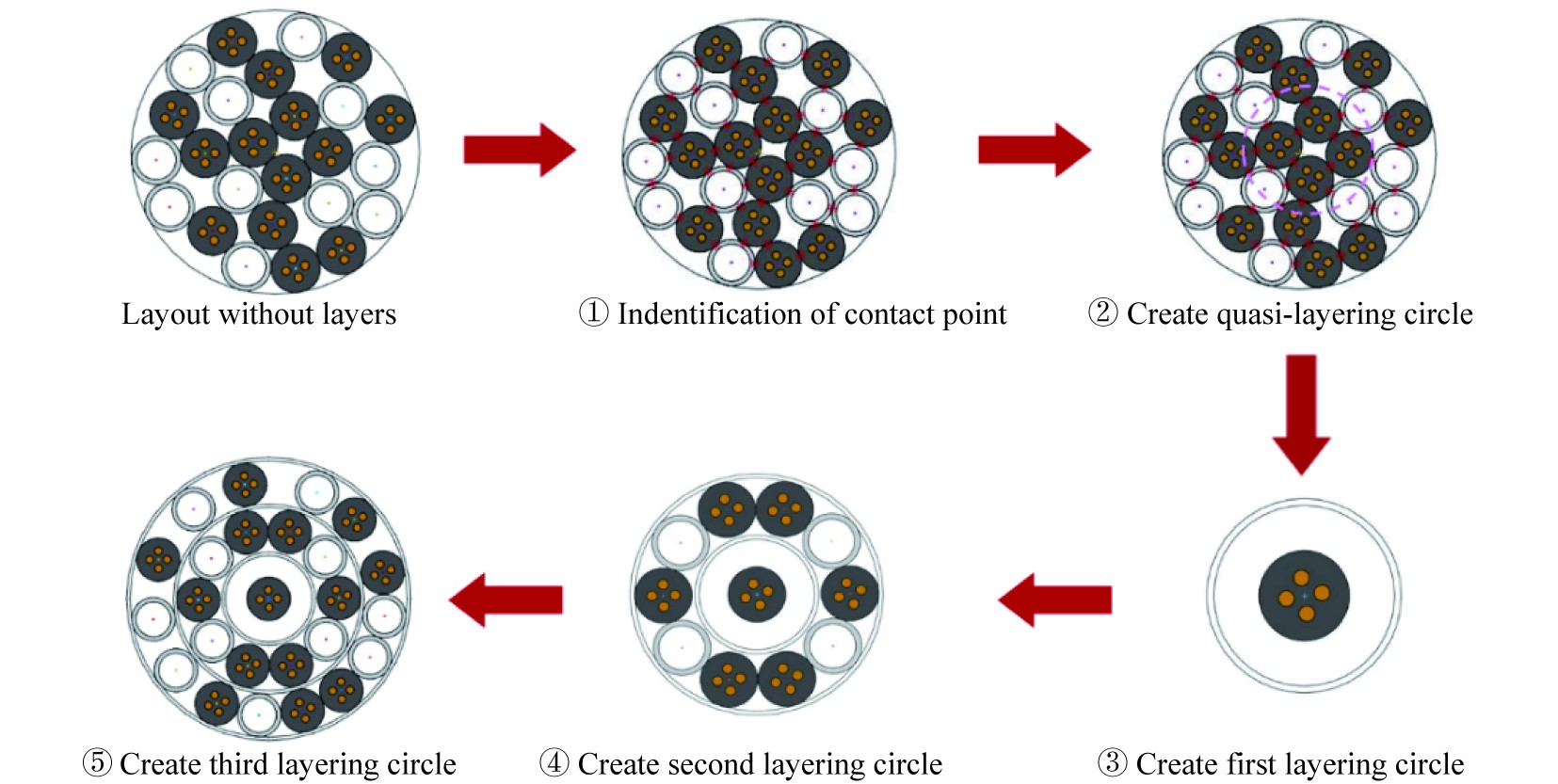
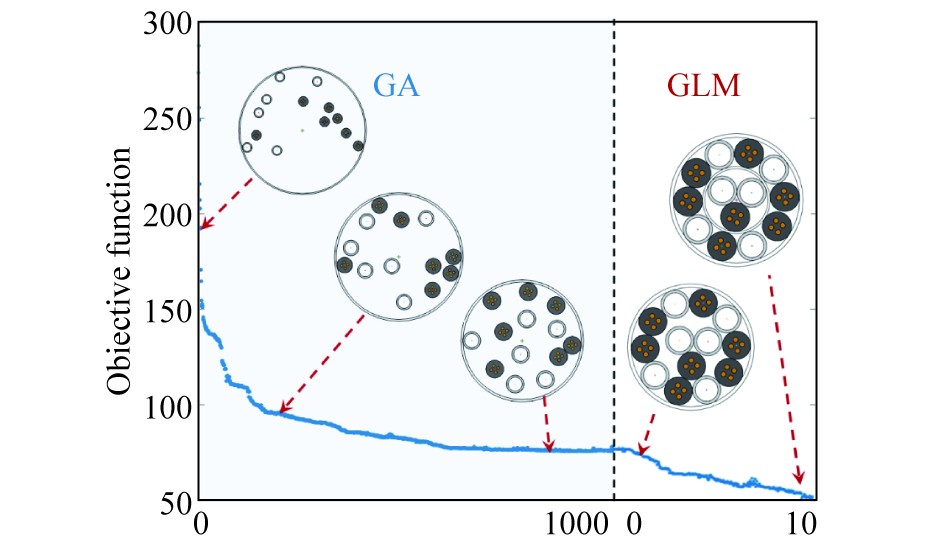
Marine umbilical is one of the key equipment for subsea oil and gas exploitation, which is usually integrated by a great number of different functional components with multi-layers. The layout of these components directly affects manufacturing, operation and storage performances of the umbilical. For the multi-layer cross-sectional layout design of the umbilical, a quantifiable multi-objective optimization model is established according to the operation and storage requirements. Considering the manufacturing factors, the multi-layering strategy based on contact point identification is introduced for a great number of functional components. Then, the GA-GLM global optimization algorithm is proposed combining the genetic algorithm and the generalized multiplier method, and the selection operator of the genetic algorithm is improved based on the steepest descent method. Genetic algorithm is used to find the optimal solution in the global space, which can converge from any initial layout to the feasible layout solution. The feasible layout solution is taken as the initial value of the generalized multiplier method for fast and accurate solution. Finally, taking umbilicals with a great number of components as examples, the results show that the cross-sectional performance of the umbilical obtained by optimization algorithm is better and the solution efficiency is higher. Meanwhile, the multi-layering strategy is effective and feasible. The design method proposed in this paper can quickly obtain the optimal multi-layer cross-sectional layout, which replaces the manual design, and provides useful reference and guidance for the umbilical industry.
Marine umbilical is one of the key equipment for subsea oil and gas exploitation, which is usually integrated by a great number of different functional components with multi-layers. The layout of these components directly affects manufacturing, operation and storage performances of the umbilical. For the multi-layer cross-sectional layout design of the umbilical, a quantifiable multi-objective optimization model is established according to the operation and storage requirements. Considering the manufacturing factors, the multi-layering strategy based on contact point identification is introduced for a great number of functional components. Then, the GA-GLM global optimization algorithm is proposed combining the genetic algorithm and the generalized multiplier method, and the selection operator of the genetic algorithm is improved based on the steepest descent method. Genetic algorithm is used to find the optimal solution in the global space, which can converge from any initial layout to the feasible layout solution. The feasible layout solution is taken as the initial value of the generalized multiplier method for fast and accurate solution. Finally, taking umbilicals with a great number of components as examples, the results show that the cross-sectional performance of the umbilical obtained by optimization algorithm is better and the solution efficiency is higher. Meanwhile, the multi-layering strategy is effective and feasible. The design method proposed in this paper can quickly obtain the optimal multi-layer cross-sectional layout, which replaces the manual design, and provides useful reference and guidance for the umbilical industry.





2024, 38(2): 255-270.
doi: 10.1007/s13344-024-0022-1
Abstract:
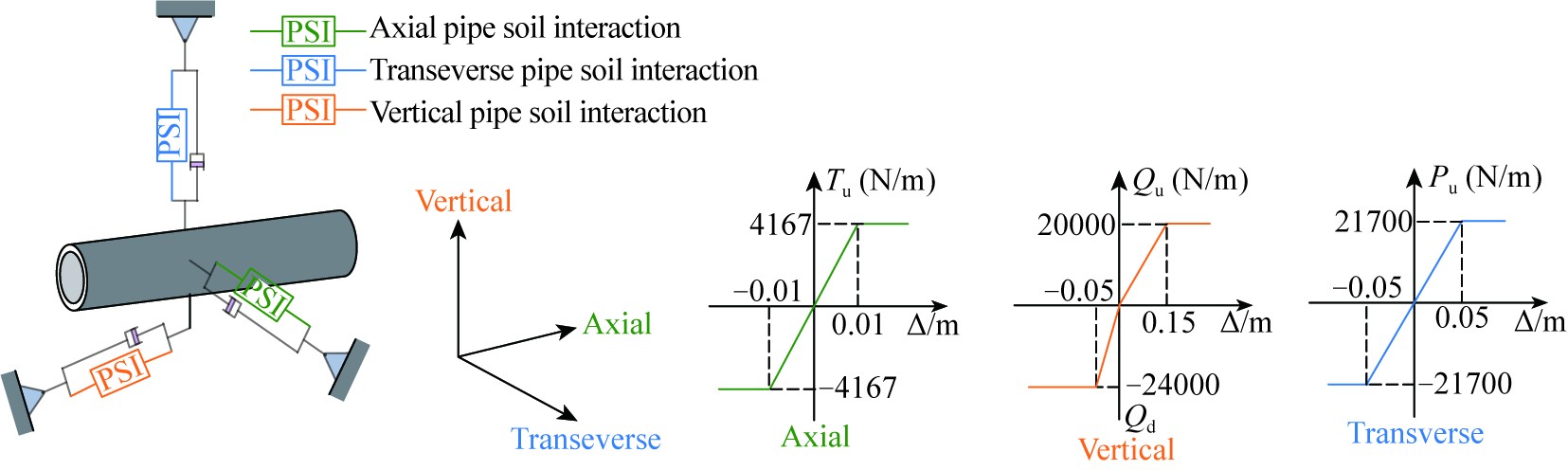
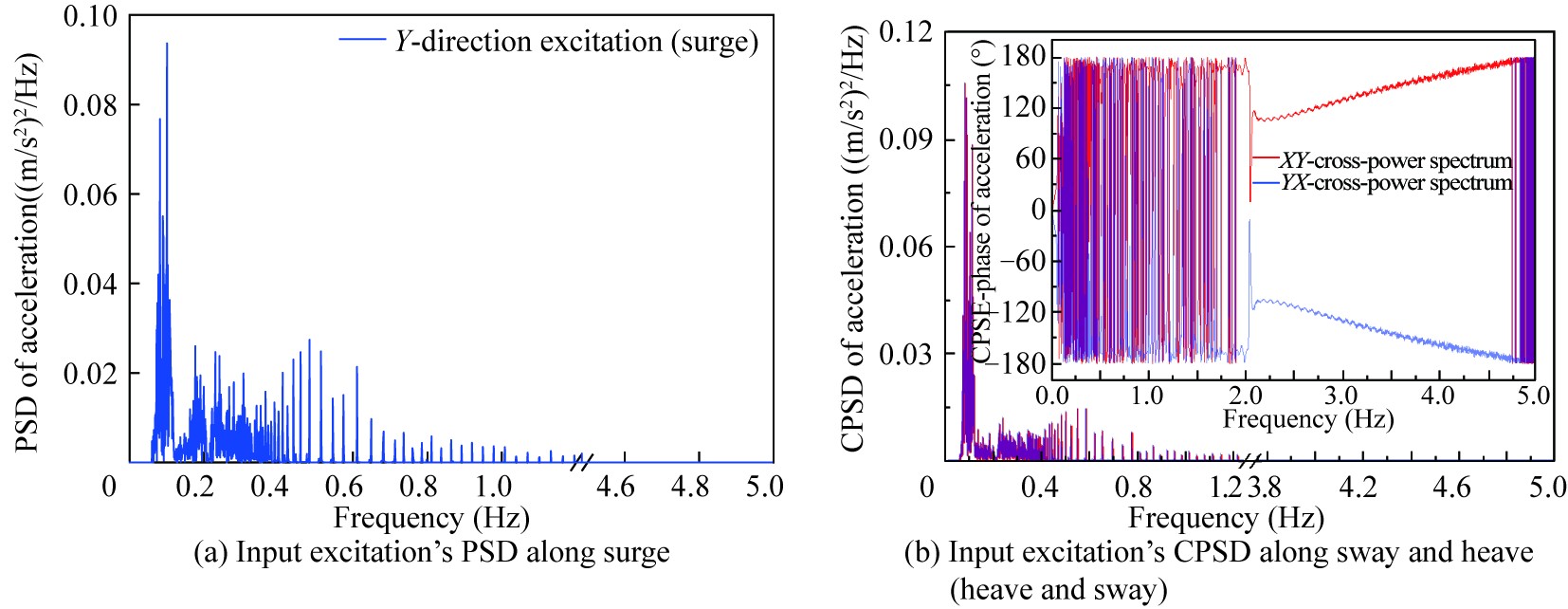
The Steel Catenary Riser (SCR) is a vital component for transporting oil and gas from the seabed to the floating platform. The harsh environmental conditions and complex platform motion make the SCR’s girth-weld prone to fatigue failure. The structural stress fatigue theory and Master S?N curve method provide accurate predictions for the fatigue damage on the welded joints, which demonstrate significant potential and compatibility in multi-axial and random fatigue evaluation. Here, we propose a new frequency fatigue model subjected to welded joints of SCR under multi-axial stress, which fully integrates the mesh-insensitive structural stress and frequency domain random process and transforms the conventional welding fatigue technique of SCR into a spectrum analysis technique utilizing structural stress. Besides, a full-scale FE model of SCR with welds is established to obtain the modal structural stress of the girth weld and the frequency response function (FRF) of modal coordinate, and a biaxial fatigue evaluation about the girth weld of the SCR can be achieved by taking the effects of multi-load correlation and pipe-soil interaction into account. The research results indicate that the frequency-domain fatigue results are aligned with the time-domain results, meeting the fatigue evaluation requirements of the SCR.
The Steel Catenary Riser (SCR) is a vital component for transporting oil and gas from the seabed to the floating platform. The harsh environmental conditions and complex platform motion make the SCR’s girth-weld prone to fatigue failure. The structural stress fatigue theory and Master S?N curve method provide accurate predictions for the fatigue damage on the welded joints, which demonstrate significant potential and compatibility in multi-axial and random fatigue evaluation. Here, we propose a new frequency fatigue model subjected to welded joints of SCR under multi-axial stress, which fully integrates the mesh-insensitive structural stress and frequency domain random process and transforms the conventional welding fatigue technique of SCR into a spectrum analysis technique utilizing structural stress. Besides, a full-scale FE model of SCR with welds is established to obtain the modal structural stress of the girth weld and the frequency response function (FRF) of modal coordinate, and a biaxial fatigue evaluation about the girth weld of the SCR can be achieved by taking the effects of multi-load correlation and pipe-soil interaction into account. The research results indicate that the frequency-domain fatigue results are aligned with the time-domain results, meeting the fatigue evaluation requirements of the SCR.












2024, 38(2): 271-284.
doi: 10.1007/s13344-024-0023-0
Abstract:
An observer-based adaptive backstepping boundary control is proposed for vibration control of flexible offshore riser systems with unknown nonlinear input dead zone and uncertain environmental disturbances. The control algorithm can update the control law online through real-time data to make the controller adapt to the environment and improve the control precision. Specifically, based on the adaptive backstepping framework, virtual control laws and Lyapunov functions are designed for each subsystem. Three direction interference observers are designed to track the time-varying boundary disturbance. On this basis, the inverse of the dead zone and linear state transformation are used to compensate for the original system and eliminate the adverse effects of the dead zone. In addition, the stability of the closed-loop system is proven by Lyapunov stability theory. All the system states are bounded, and the vibration offset of the riser converges to a small area of the initial position. Finally, four examples of flexible marine risers are simulated in MATLAB to verify the effectiveness of the proposed controller.
An observer-based adaptive backstepping boundary control is proposed for vibration control of flexible offshore riser systems with unknown nonlinear input dead zone and uncertain environmental disturbances. The control algorithm can update the control law online through real-time data to make the controller adapt to the environment and improve the control precision. Specifically, based on the adaptive backstepping framework, virtual control laws and Lyapunov functions are designed for each subsystem. Three direction interference observers are designed to track the time-varying boundary disturbance. On this basis, the inverse of the dead zone and linear state transformation are used to compensate for the original system and eliminate the adverse effects of the dead zone. In addition, the stability of the closed-loop system is proven by Lyapunov stability theory. All the system states are bounded, and the vibration offset of the riser converges to a small area of the initial position. Finally, four examples of flexible marine risers are simulated in MATLAB to verify the effectiveness of the proposed controller.











2024, 38(2): 285-296.
doi: 10.1007/s13344-024-0024-z
Abstract:
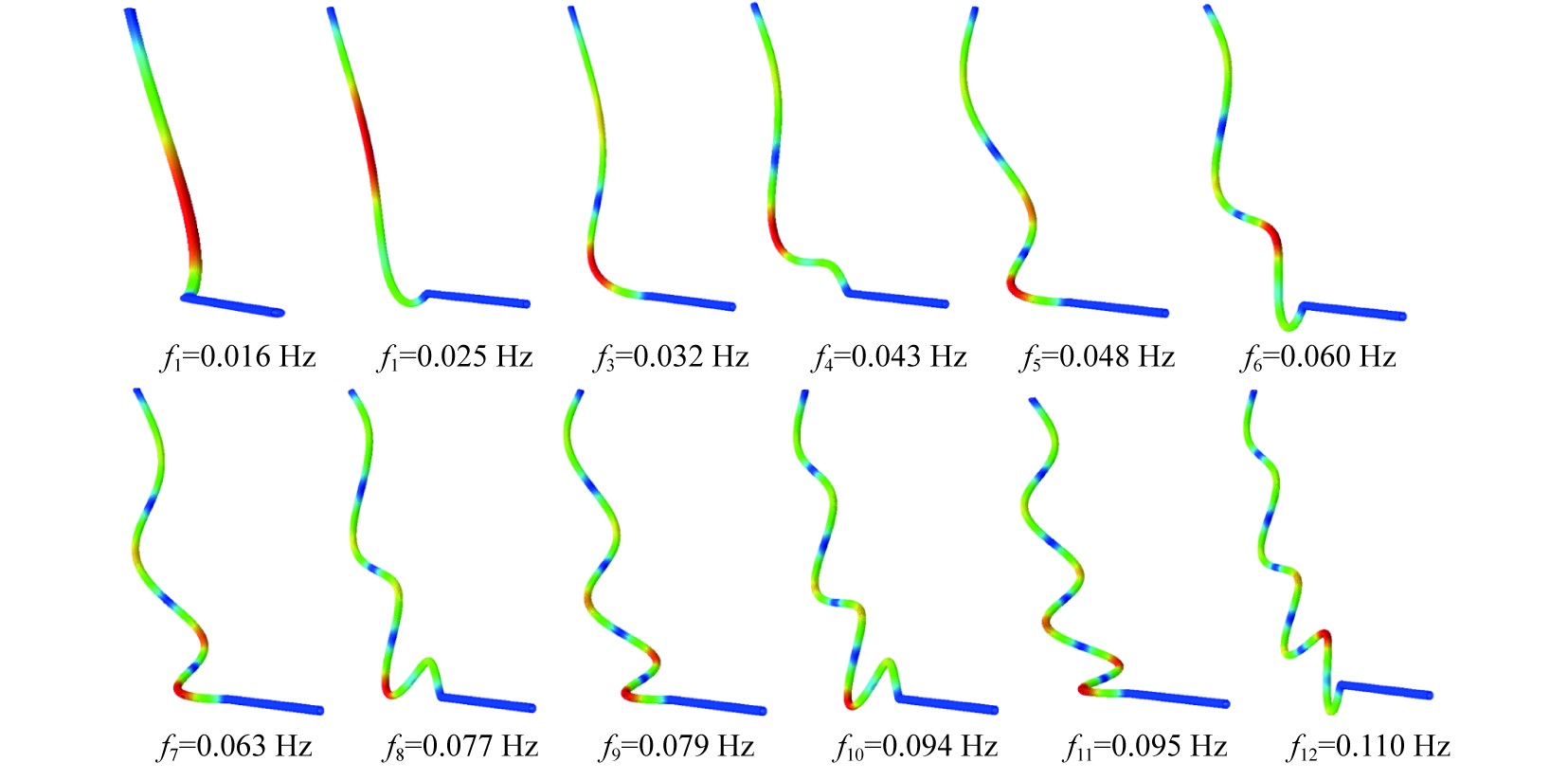
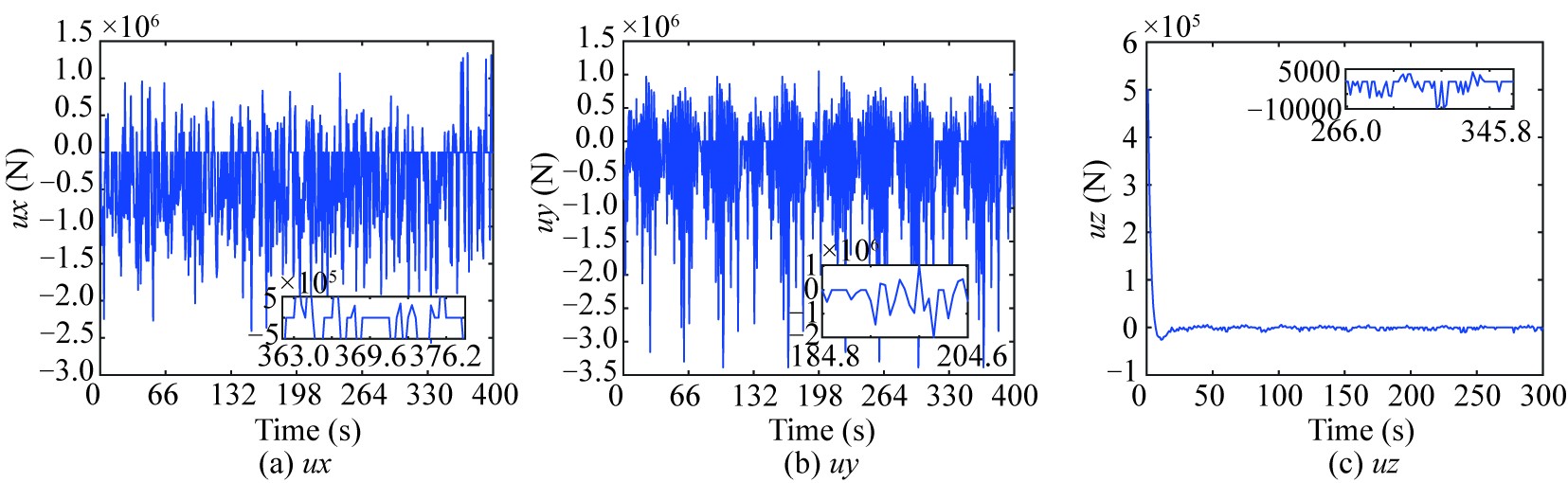
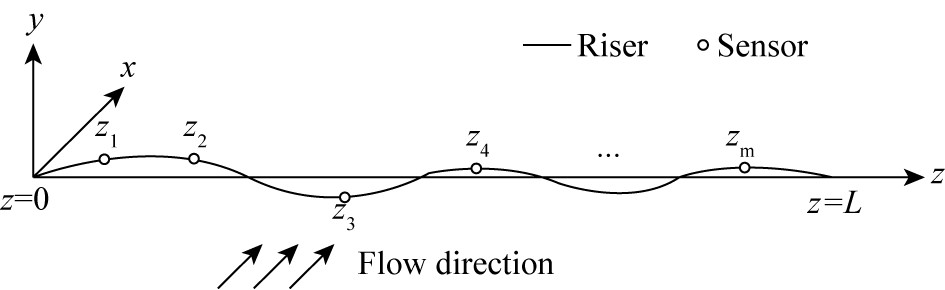
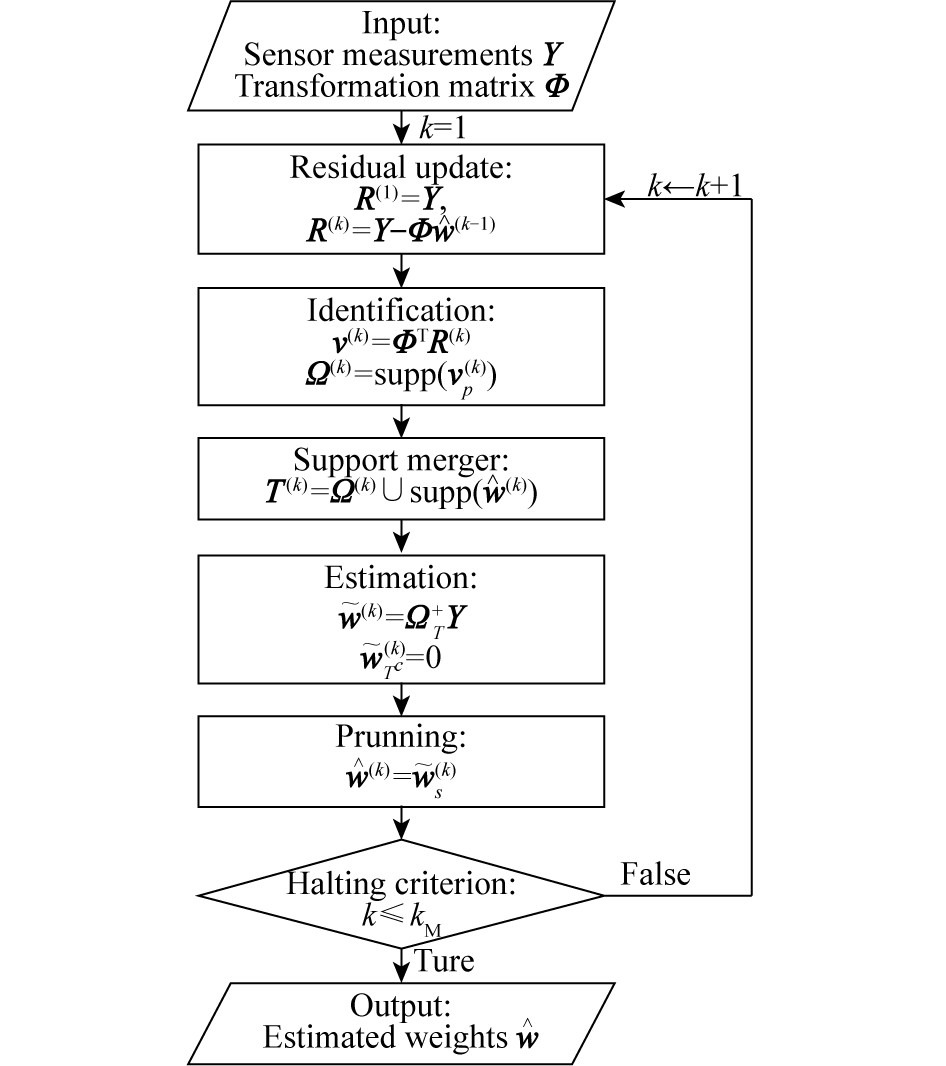
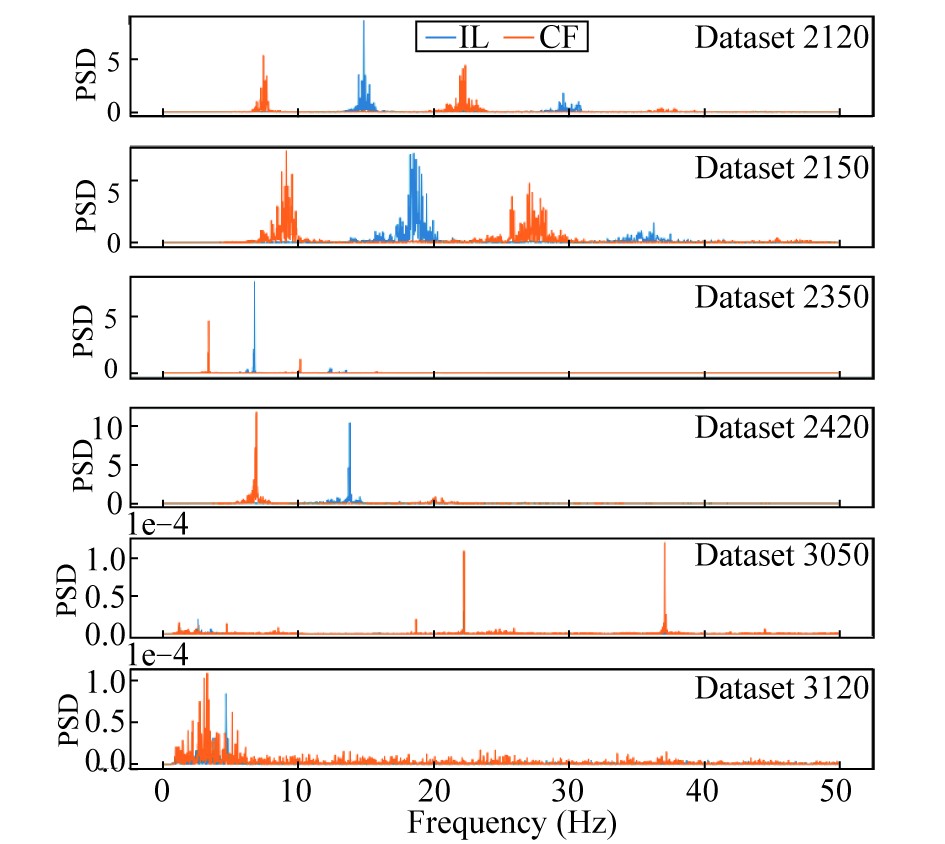
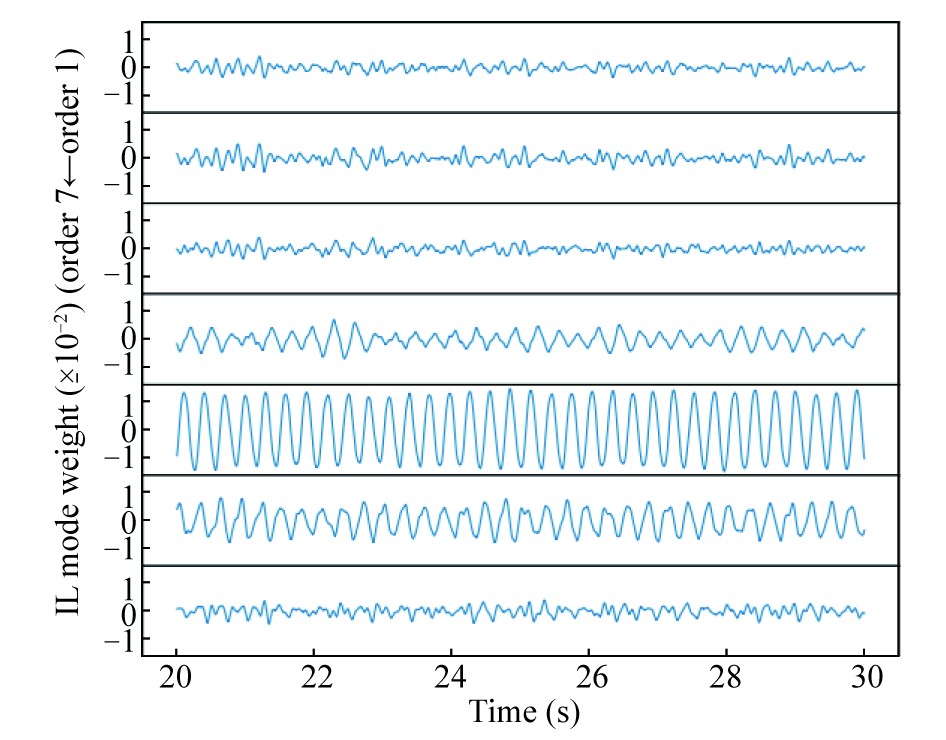
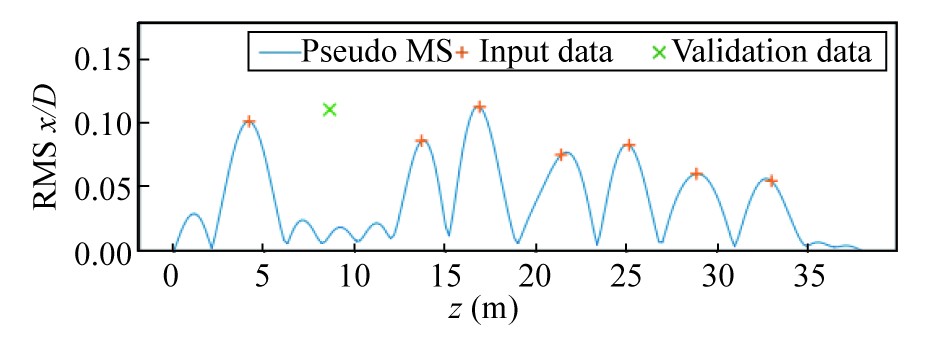
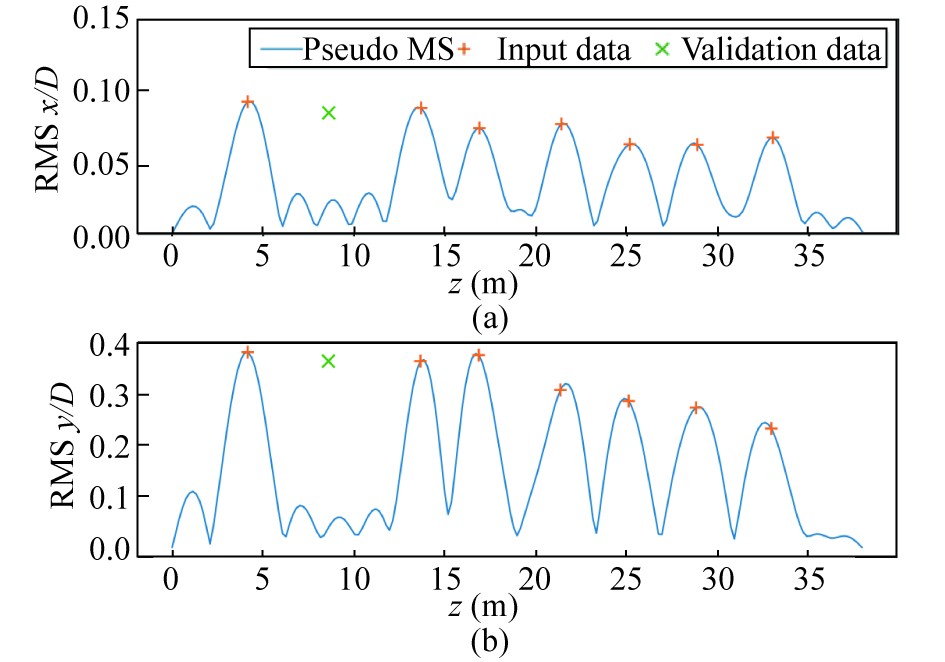
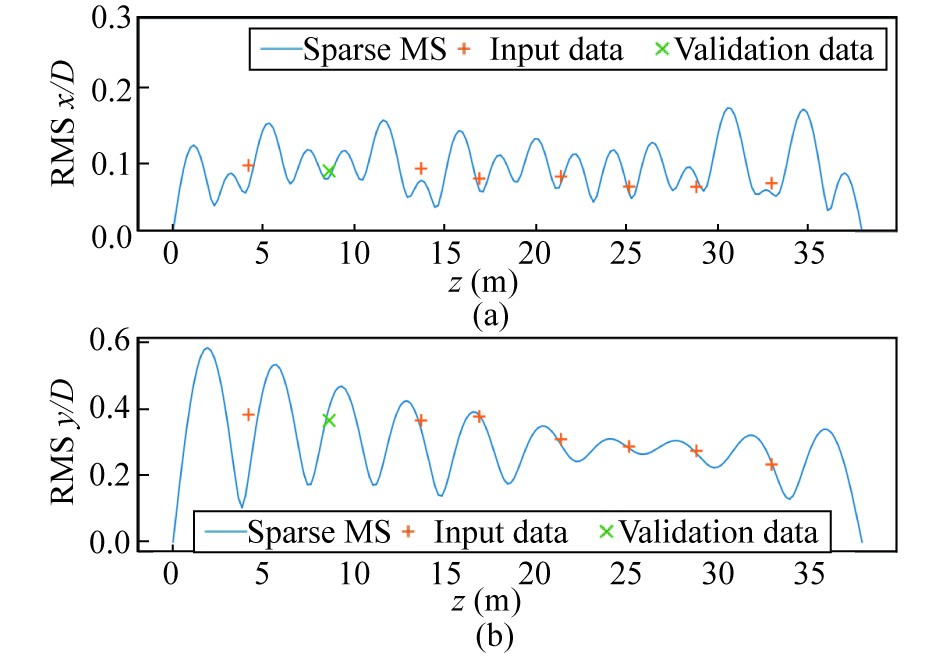
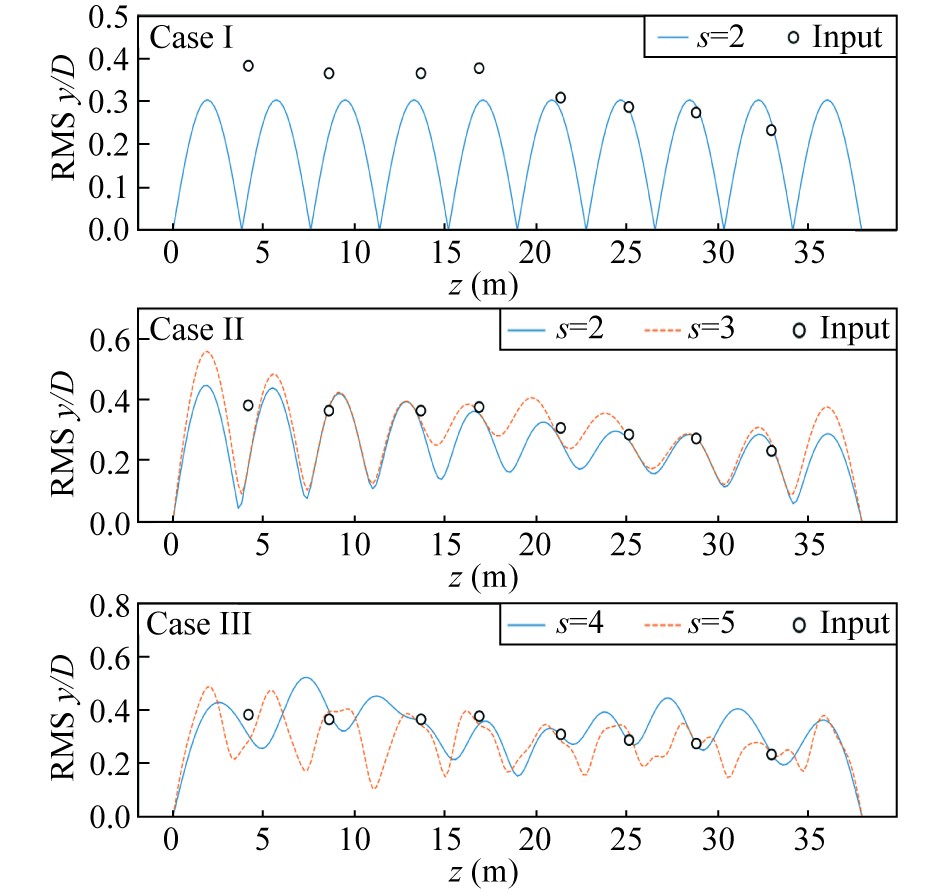
When investigating the vortex-induced vibration (VIV) of marine risers, extrapolating the dynamic response on the entire length based on limited sensor measurements is a crucial step in both laboratory experiments and fatigue monitoring of real risers. The problem is conventionally solved using the modal decomposition method, based on the principle that the response can be approximated by a weighted sum of limited vibration modes. However, the method is not valid when the problem is underdetermined, i.e., the number of unknown mode weights is more than the number of known measurements. This study proposed a sparse modal decomposition method based on the compressed sensing theory and the Compressive Sampling Matching Pursuit (CoSaMP) algorithm, exploiting the sparsity of VIV in the modal space. In the validation study based on high-order VIV experiment data, the proposed method successfully reconstructed the response using only seven acceleration measurements when the conventional methods failed. A primary advantage of the proposed method is that it offers a completely data-driven approach for the underdetermined VIV reconstruction problem, which is more favorable than existing model-dependent solutions for many practical applications such as riser structural health monitoring.
When investigating the vortex-induced vibration (VIV) of marine risers, extrapolating the dynamic response on the entire length based on limited sensor measurements is a crucial step in both laboratory experiments and fatigue monitoring of real risers. The problem is conventionally solved using the modal decomposition method, based on the principle that the response can be approximated by a weighted sum of limited vibration modes. However, the method is not valid when the problem is underdetermined, i.e., the number of unknown mode weights is more than the number of known measurements. This study proposed a sparse modal decomposition method based on the compressed sensing theory and the Compressive Sampling Matching Pursuit (CoSaMP) algorithm, exploiting the sparsity of VIV in the modal space. In the validation study based on high-order VIV experiment data, the proposed method successfully reconstructed the response using only seven acceleration measurements when the conventional methods failed. A primary advantage of the proposed method is that it offers a completely data-driven approach for the underdetermined VIV reconstruction problem, which is more favorable than existing model-dependent solutions for many practical applications such as riser structural health monitoring.










2024, 38(2): 297-312.
doi: 10.1007/s13344-024-0025-y
Abstract:
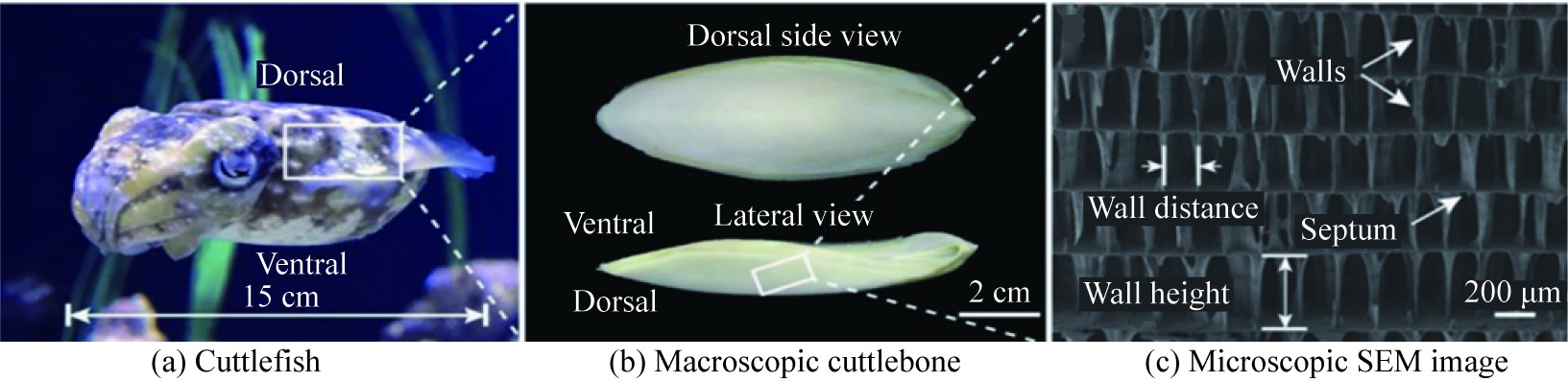
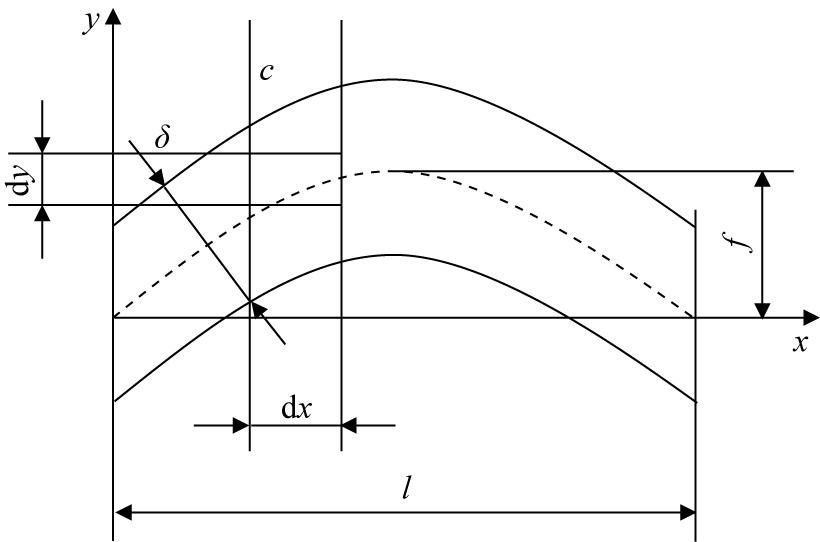
This paper aims to enhance the compression capacity of underwater cylindrical shells by adopting the corrugated sandwich structure of cuttlebone. The cuttlebone suffers uniaxial external compression, while underwater cylindrical shells are in a biaxial compressive stress state. To suit the biaxial compressive stress state, a novel bidirectional corrugated sandwich structure is proposed to improve the bearing capacity of cylindrical shells. The static and buckling analysis for the sandwich shell and the unstiffened cylindrical shell with the same volume-weight ratio are studied by numerical simulation. It is indicated that the proposed sandwich shell can effectively reduce the ratio between circumferential and axial stress from 2 to 1.25 and improve the critical buckling load by about 1.63 times. Numerical simulation shows that optimizing and adjusting the structural parameters could significantly improve the advantage of the sandwich shell. Then, the hydrostatic pressure tests for shell models fabricated by 3D printing are carried out. According to the experimental results, the overall failure position of the sandwich shell is at the center part of the sandwich shell. It has been found the average critical load of the proposed sandwich shell models exceeds two times that of the unstiffened shell models. Hence, the proposed bio-inspired bidirectional corrugated sandwich structure can significantly enhance the pressure resistance capability of cylindrical shells.
This paper aims to enhance the compression capacity of underwater cylindrical shells by adopting the corrugated sandwich structure of cuttlebone. The cuttlebone suffers uniaxial external compression, while underwater cylindrical shells are in a biaxial compressive stress state. To suit the biaxial compressive stress state, a novel bidirectional corrugated sandwich structure is proposed to improve the bearing capacity of cylindrical shells. The static and buckling analysis for the sandwich shell and the unstiffened cylindrical shell with the same volume-weight ratio are studied by numerical simulation. It is indicated that the proposed sandwich shell can effectively reduce the ratio between circumferential and axial stress from 2 to 1.25 and improve the critical buckling load by about 1.63 times. Numerical simulation shows that optimizing and adjusting the structural parameters could significantly improve the advantage of the sandwich shell. Then, the hydrostatic pressure tests for shell models fabricated by 3D printing are carried out. According to the experimental results, the overall failure position of the sandwich shell is at the center part of the sandwich shell. It has been found the average critical load of the proposed sandwich shell models exceeds two times that of the unstiffened shell models. Hence, the proposed bio-inspired bidirectional corrugated sandwich structure can significantly enhance the pressure resistance capability of cylindrical shells.


















2024, 38(2): 313-325.
doi: 10.1007/s13344-024-0026-x
Abstract:
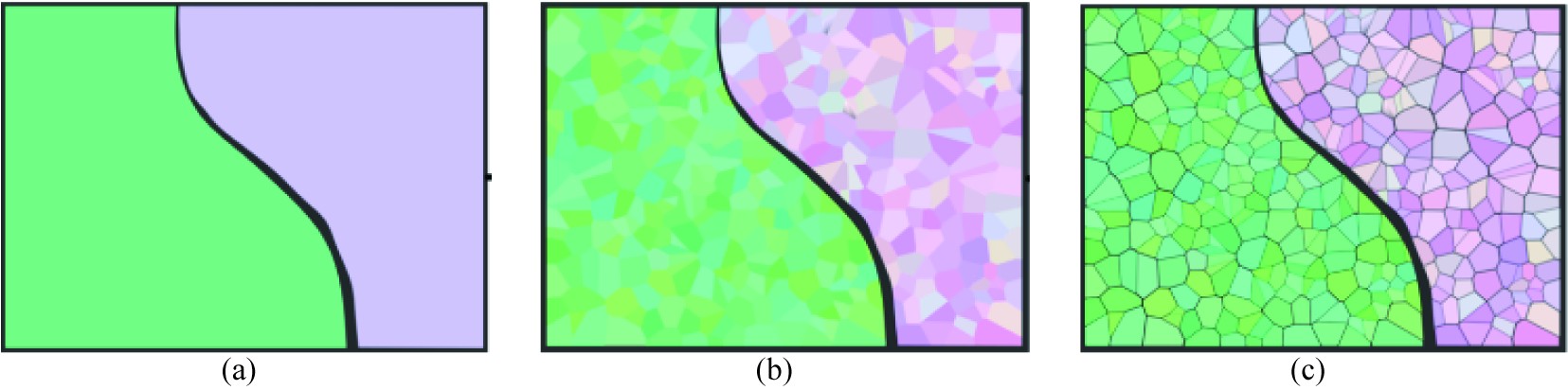
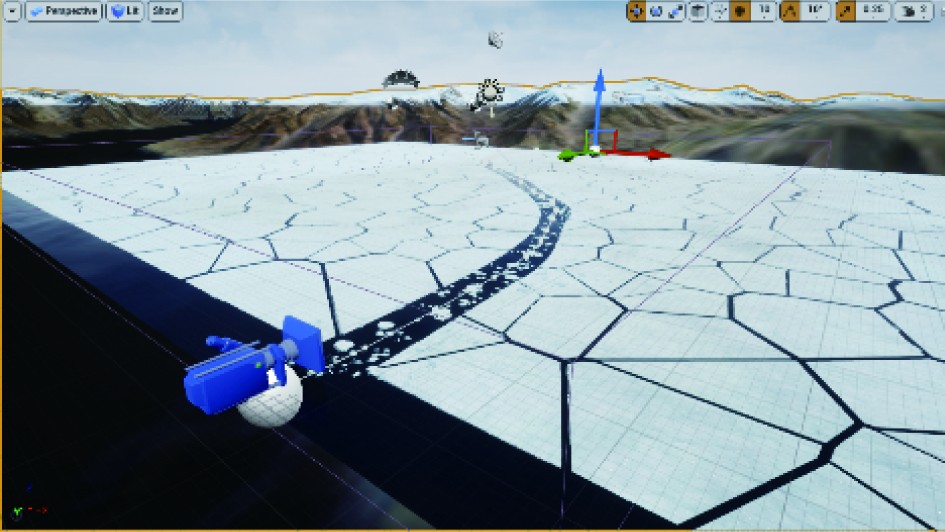
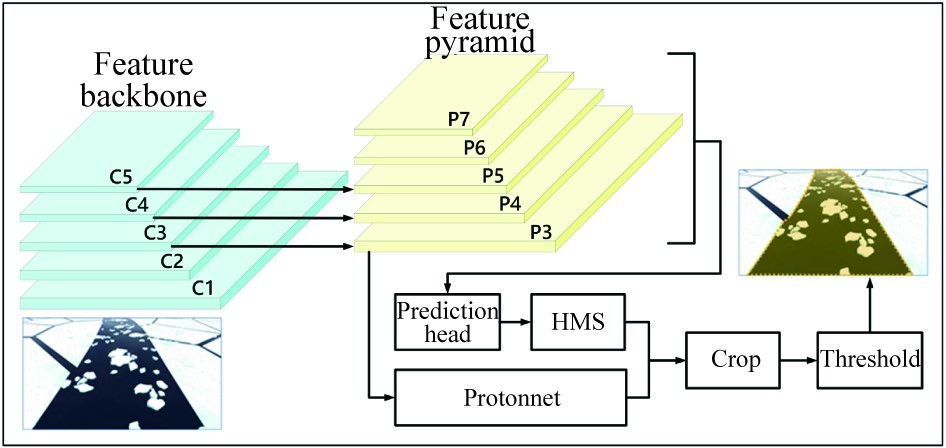
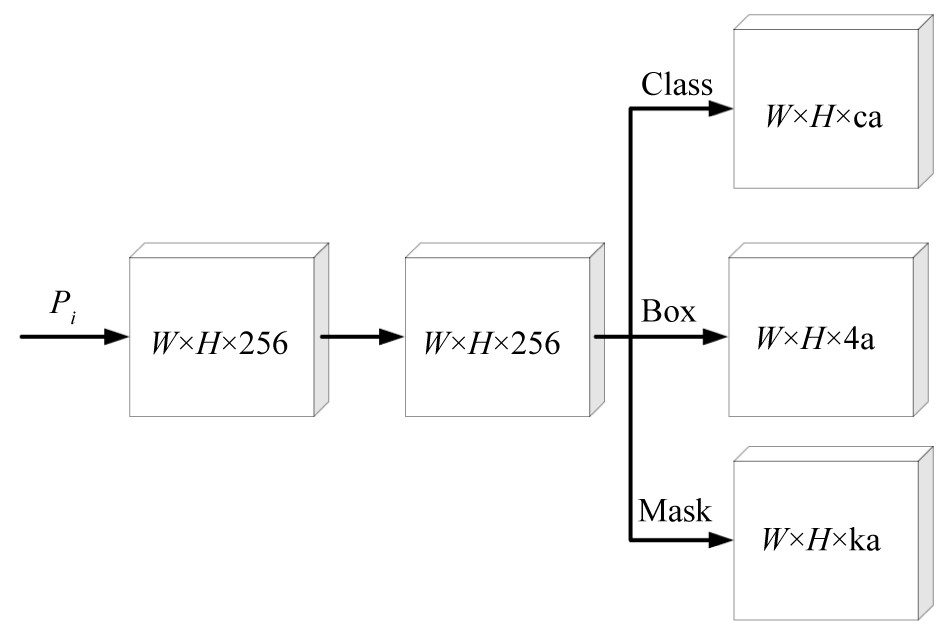
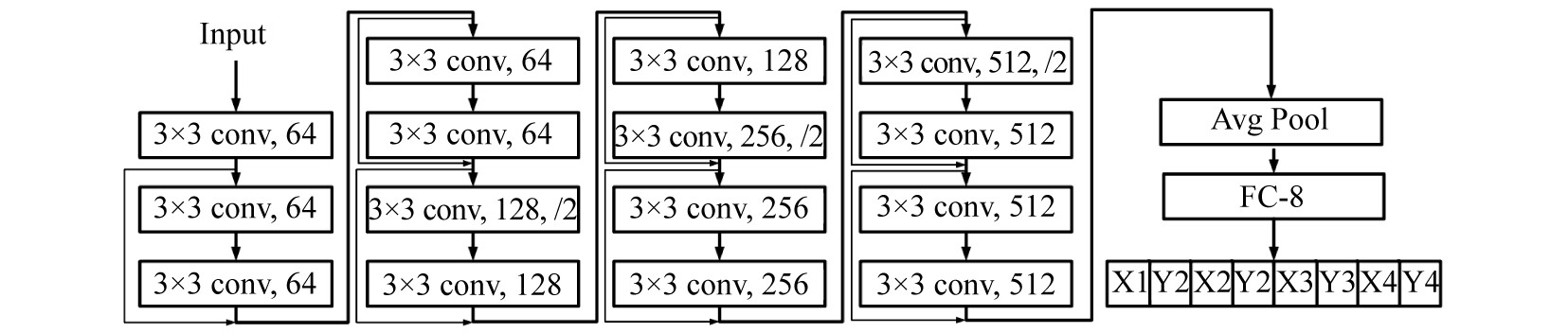
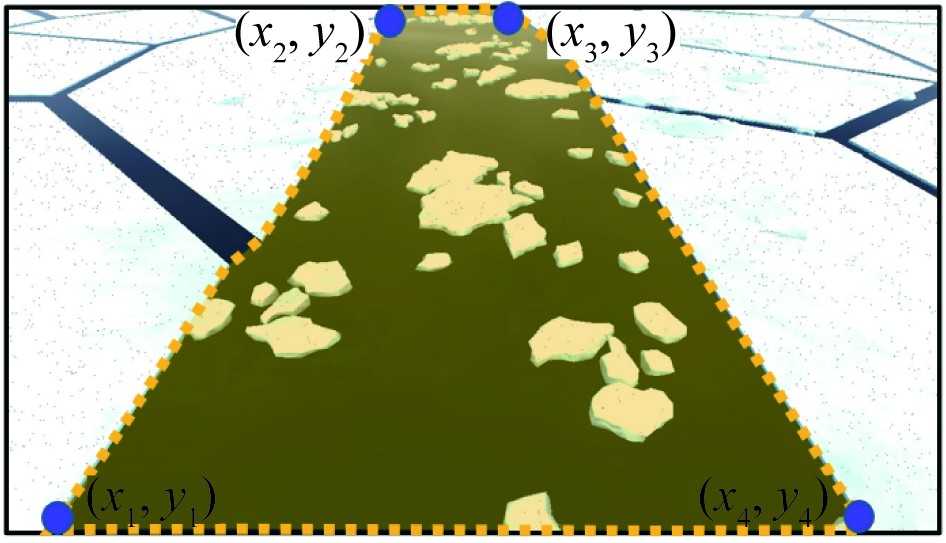
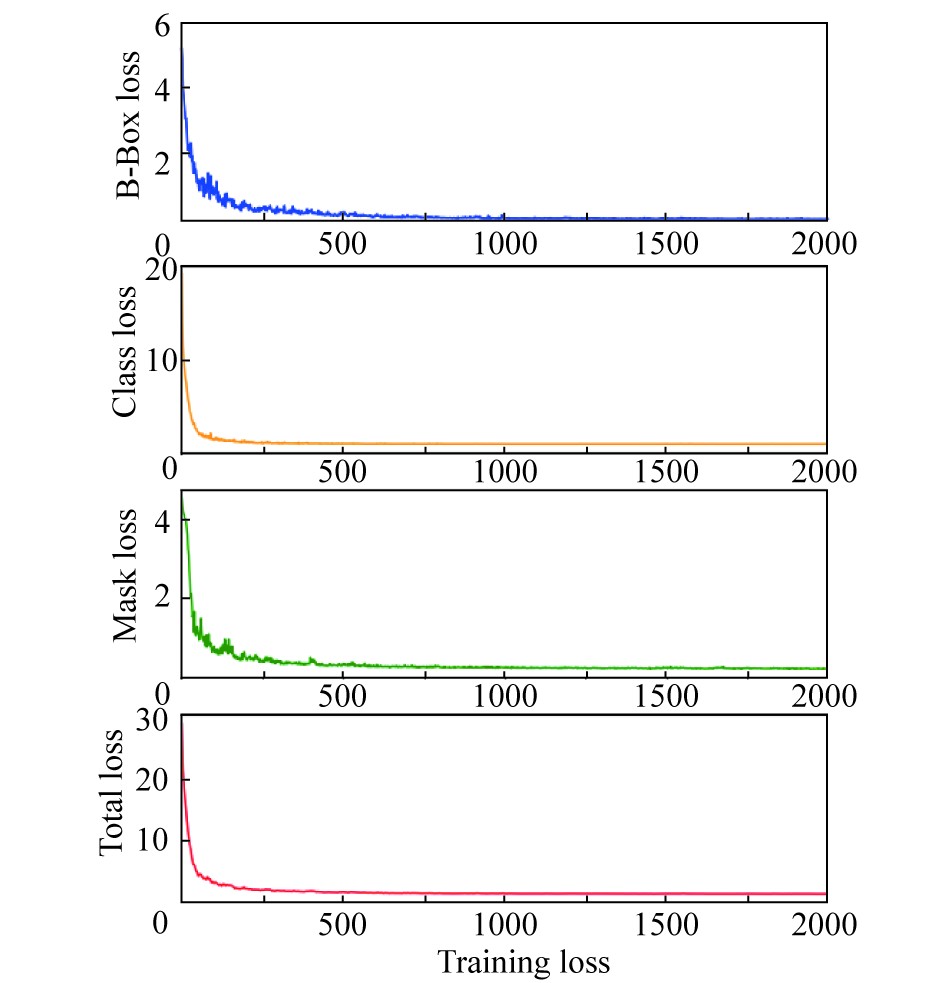
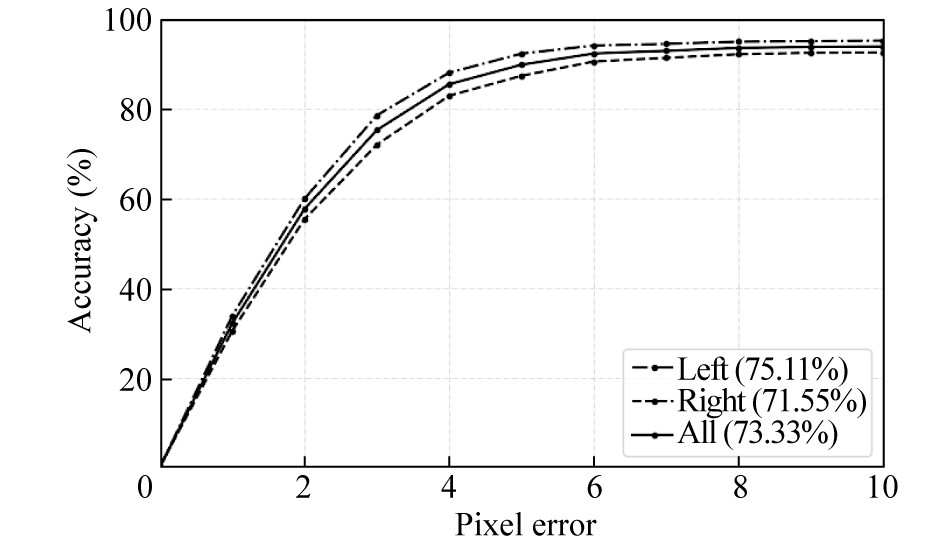
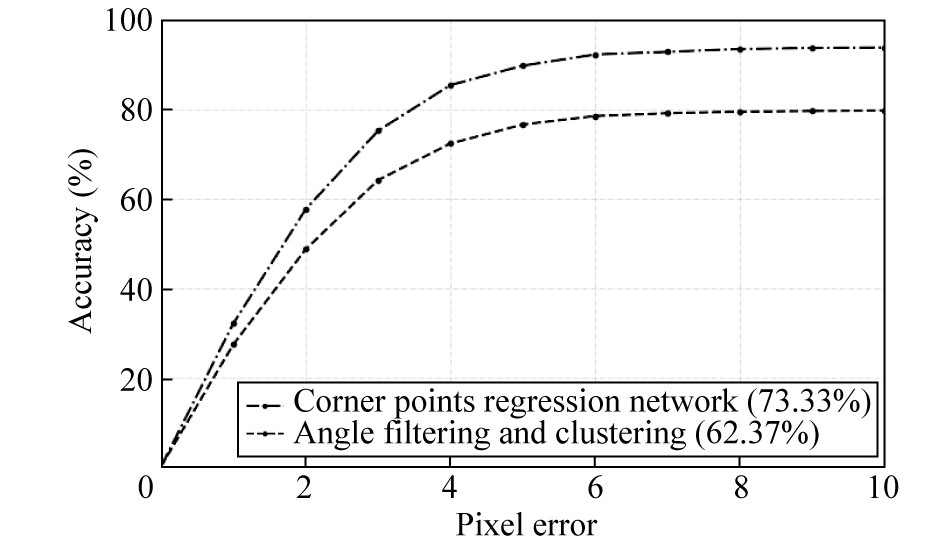
Identification of the ice channel is the basic technology for developing intelligent ships in ice-covered waters, which is important to ensure the safety and economy of navigation. In the Arctic, merchant ships with low ice class often navigate in channels opened up by icebreakers. Navigation in the ice channel often depends on good maneuverability skills and abundant experience from the captain to a large extent. The ship may get stuck if steered into ice fields off the channel. Under this circumstance, it is very important to study how to identify the boundary lines of ice channels with a reliable method. In this paper, a two-staged ice channel identification method is developed based on image segmentation and corner point regression. The first stage employs the image segmentation method to extract channel regions. In the second stage, an intelligent corner regression network is proposed to extract the channel boundary lines from the channel region. A non-intelligent angle-based filtering and clustering method is proposed and compared with corner point regression network. The training and evaluation of the segmentation method and corner regression network are carried out on the synthetic and real ice channel dataset. The evaluation results show that the accuracy of the method using the corner point regression network in the second stage is achieved as high as 73.33% on the synthetic ice channel dataset and 70.66% on the real ice channel dataset, and the processing speed can reach up to 14.58 frames per second.
Identification of the ice channel is the basic technology for developing intelligent ships in ice-covered waters, which is important to ensure the safety and economy of navigation. In the Arctic, merchant ships with low ice class often navigate in channels opened up by icebreakers. Navigation in the ice channel often depends on good maneuverability skills and abundant experience from the captain to a large extent. The ship may get stuck if steered into ice fields off the channel. Under this circumstance, it is very important to study how to identify the boundary lines of ice channels with a reliable method. In this paper, a two-staged ice channel identification method is developed based on image segmentation and corner point regression. The first stage employs the image segmentation method to extract channel regions. In the second stage, an intelligent corner regression network is proposed to extract the channel boundary lines from the channel region. A non-intelligent angle-based filtering and clustering method is proposed and compared with corner point regression network. The training and evaluation of the segmentation method and corner regression network are carried out on the synthetic and real ice channel dataset. The evaluation results show that the accuracy of the method using the corner point regression network in the second stage is achieved as high as 73.33% on the synthetic ice channel dataset and 70.66% on the real ice channel dataset, and the processing speed can reach up to 14.58 frames per second.











Hao-jie LI,
Bao-ping CAI,
Xiao-bing YUAN,
Xiang-di KONG,
Yong-hong LIU,
Akbar KHAN Javed,
Zheng-de CHU,
Chao YANG,
An-bang TANG
2024, 38(2): 326-337.
doi: 10.1007/s13344-024-0027-9
Abstract:
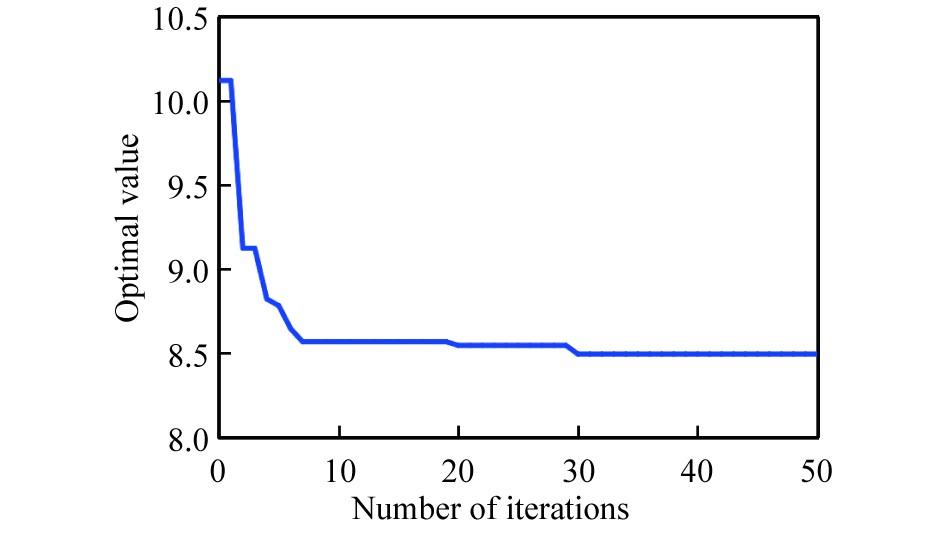
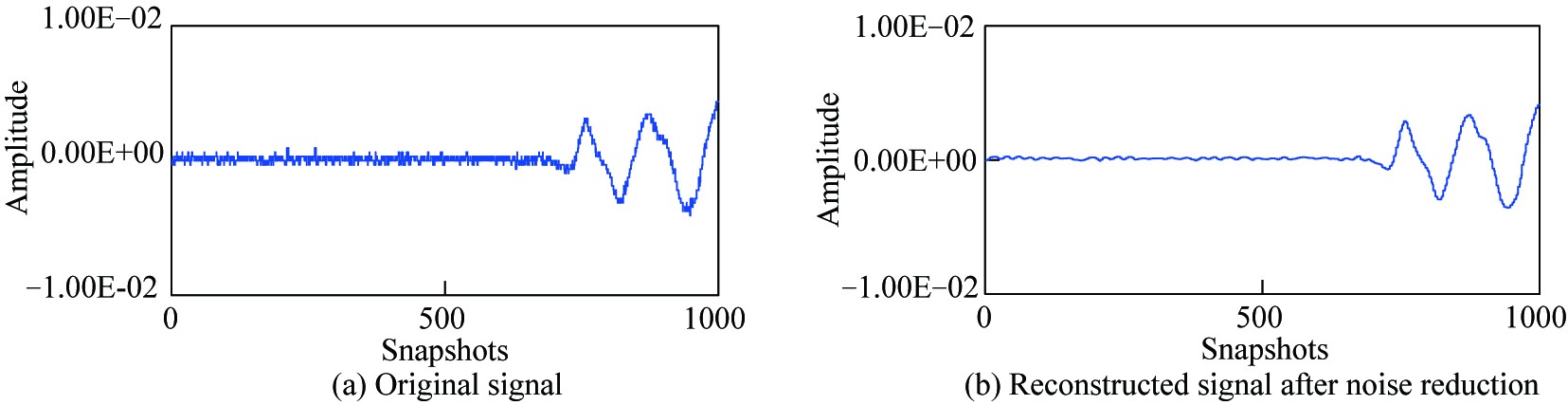
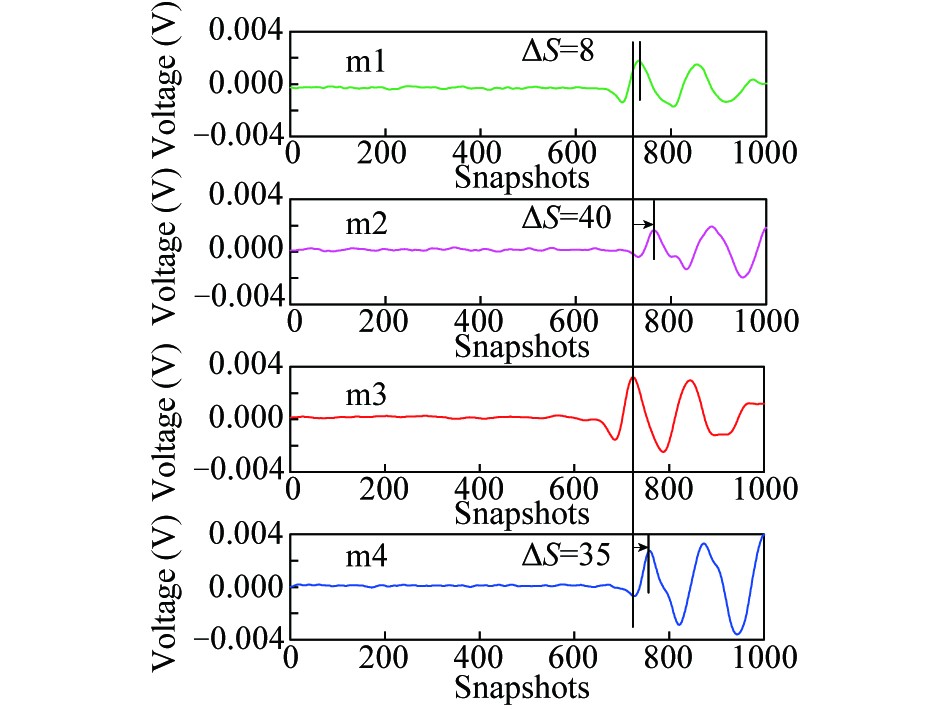
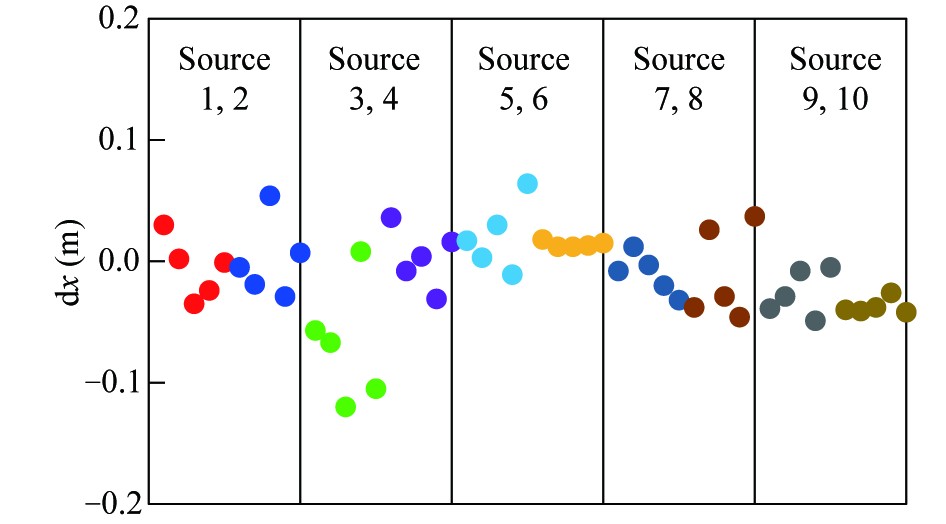
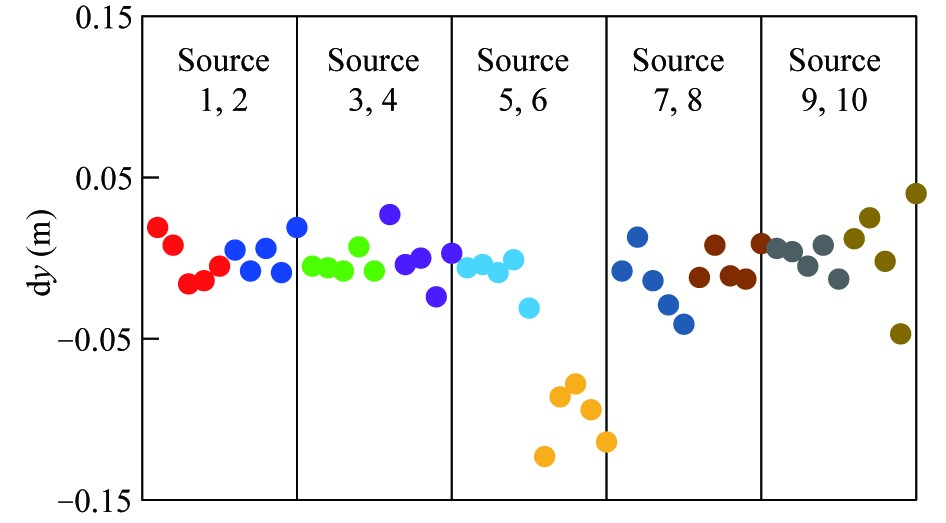
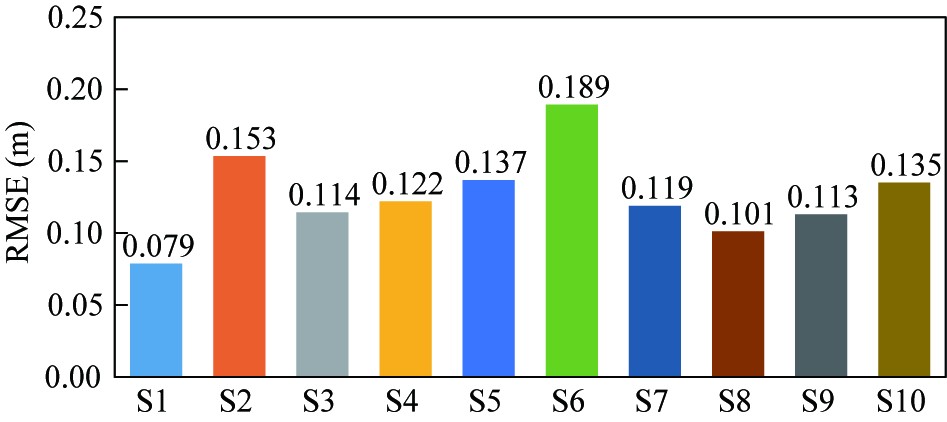
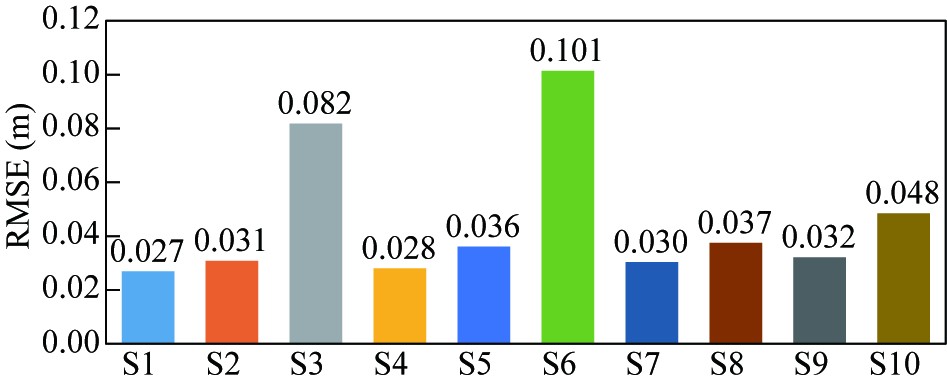
Leakages from subsea oil and gas equipment cause substantial economic losses and damage to marine ecosystem, so it is essential to locate the source of the leak. However, due to the complexity and variability of the marine environment, the signals collected by hydrophone contain a variety of noises, which makes it challenging to extract useful signals for localization. To solve this problem, a hydrophone denoising algorithm is proposed based on variational modal decomposition (VMD) with grey wolf optimization. First, the average envelope entropy is used as the fitness function of the grey wolf optimizer to find the optimal solution for the parameters K and α. Afterward, the VMD algorithm decomposes the original signal parameters to obtain the intrinsic mode functions (IMFs). Subsequently, the number of interrelationships between each IMF and the original signal was calculated, the threshold value was set, and the noise signal was removed to calculate the time difference using the valid signal obtained by reconstruction. Finally, the arrival time difference is used to locate the origin of the leak. The localization accuracy of the method in finding leaks is investigated experimentally by constructing a simulated leak test rig, and the effectiveness and feasibility of the method are verified.
Leakages from subsea oil and gas equipment cause substantial economic losses and damage to marine ecosystem, so it is essential to locate the source of the leak. However, due to the complexity and variability of the marine environment, the signals collected by hydrophone contain a variety of noises, which makes it challenging to extract useful signals for localization. To solve this problem, a hydrophone denoising algorithm is proposed based on variational modal decomposition (VMD) with grey wolf optimization. First, the average envelope entropy is used as the fitness function of the grey wolf optimizer to find the optimal solution for the parameters K and α. Afterward, the VMD algorithm decomposes the original signal parameters to obtain the intrinsic mode functions (IMFs). Subsequently, the number of interrelationships between each IMF and the original signal was calculated, the threshold value was set, and the noise signal was removed to calculate the time difference using the valid signal obtained by reconstruction. Finally, the arrival time difference is used to locate the origin of the leak. The localization accuracy of the method in finding leaks is investigated experimentally by constructing a simulated leak test rig, and the effectiveness and feasibility of the method are verified.






2024, 38(2): 338-351.
doi: 10.1007/s13344-024-0028-8
Abstract:
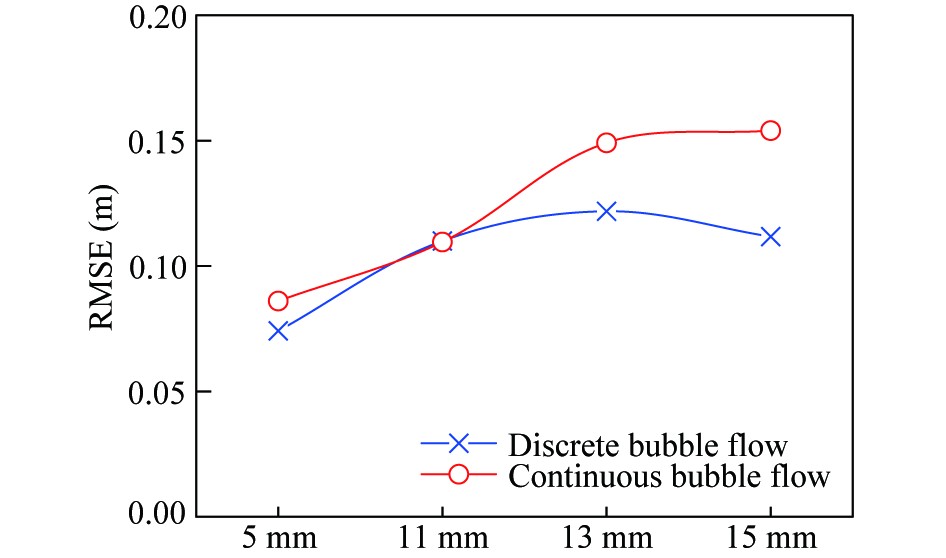
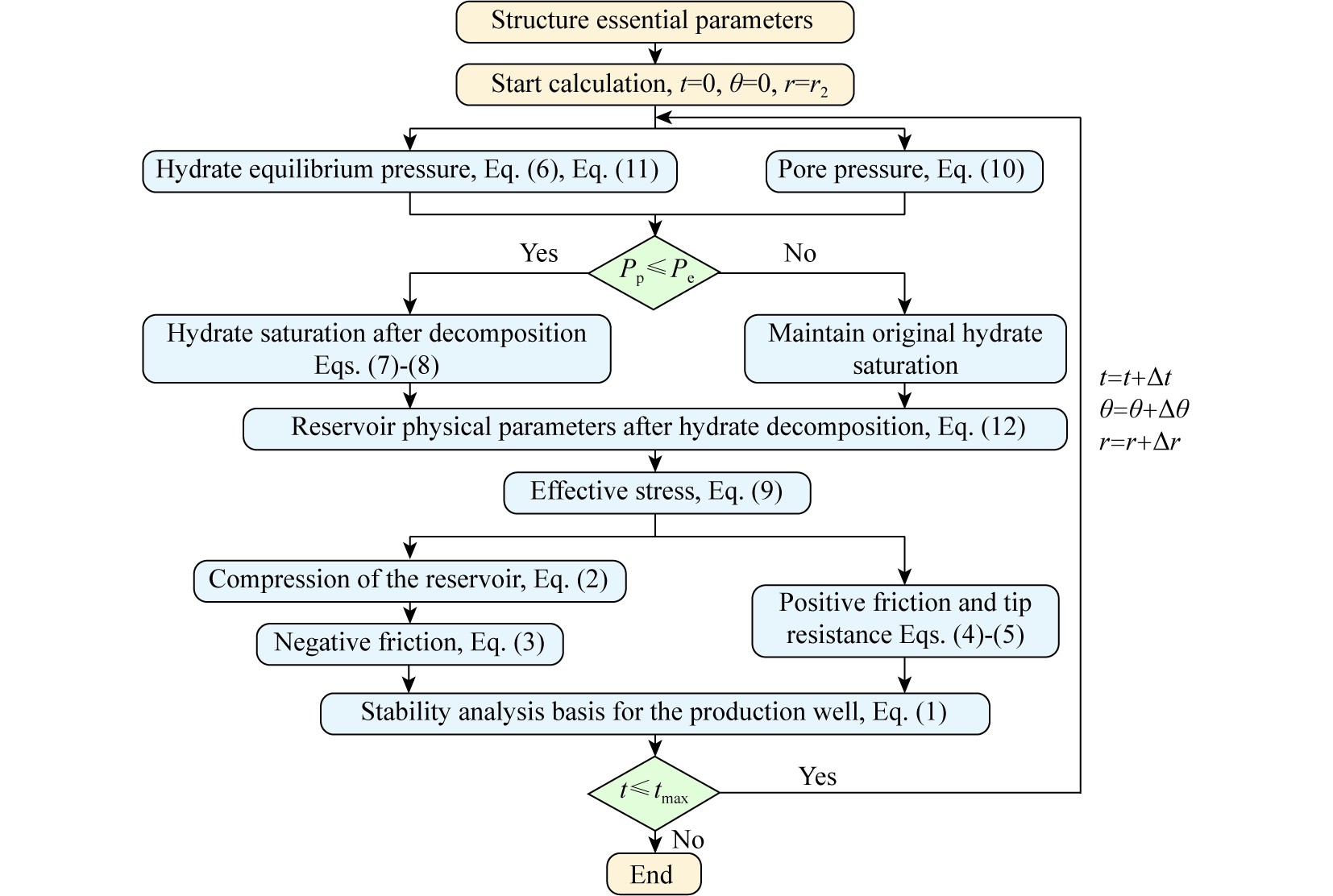
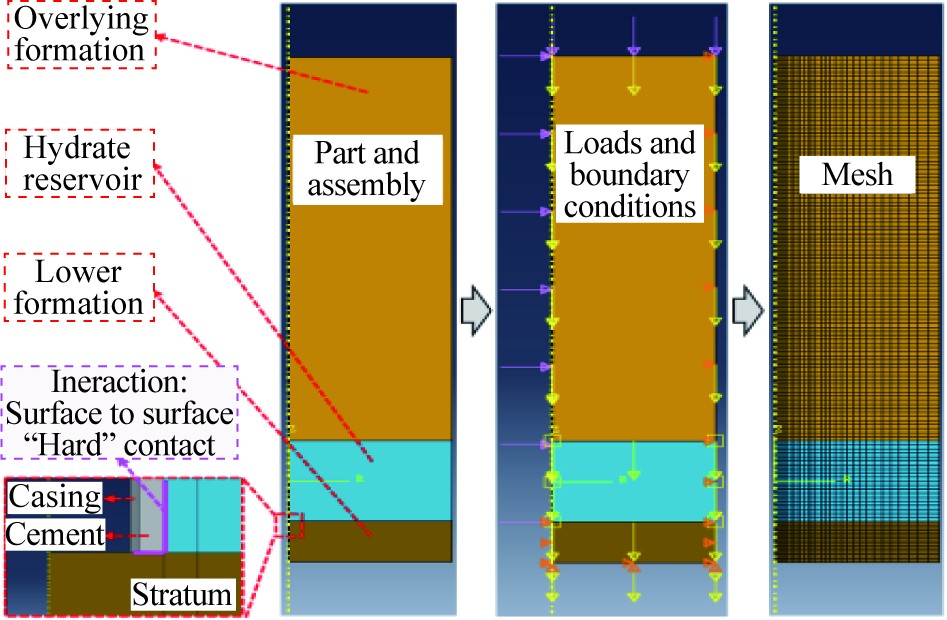
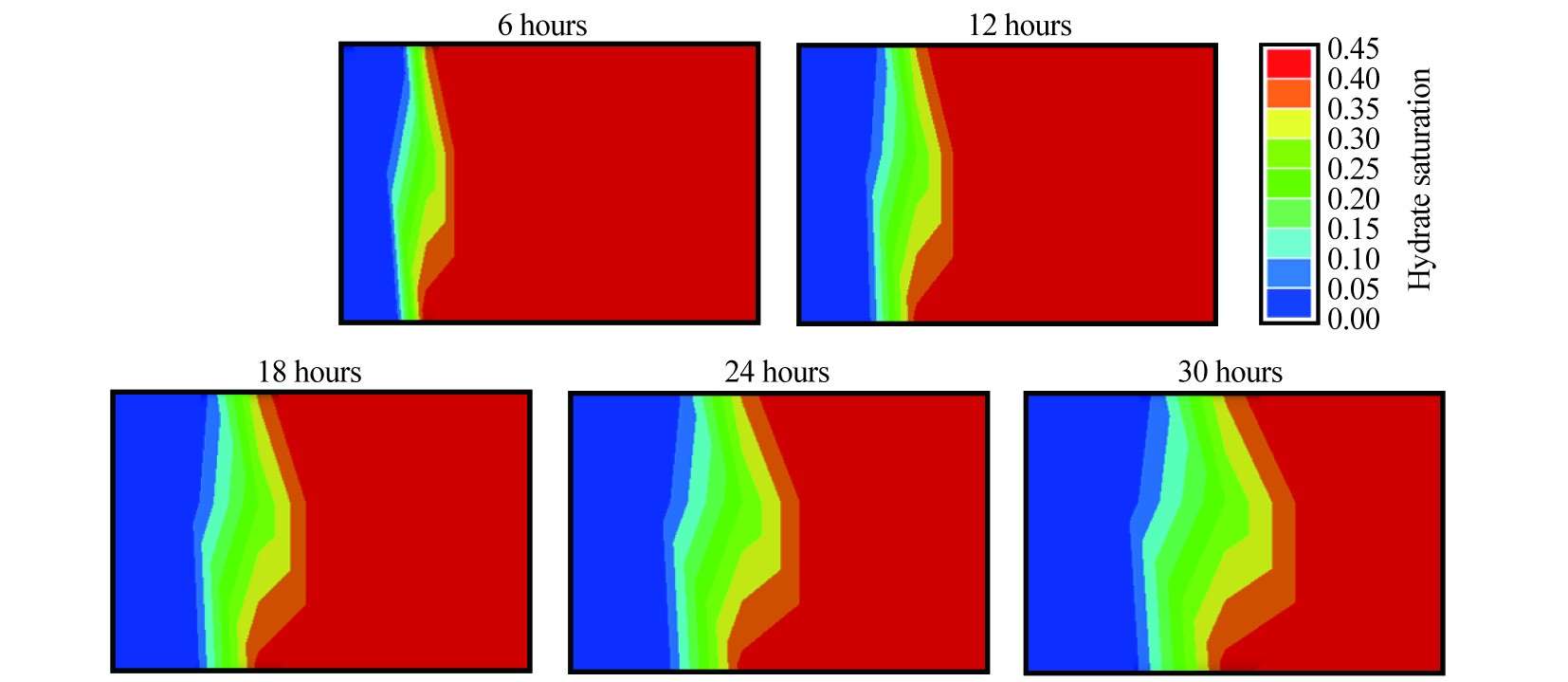
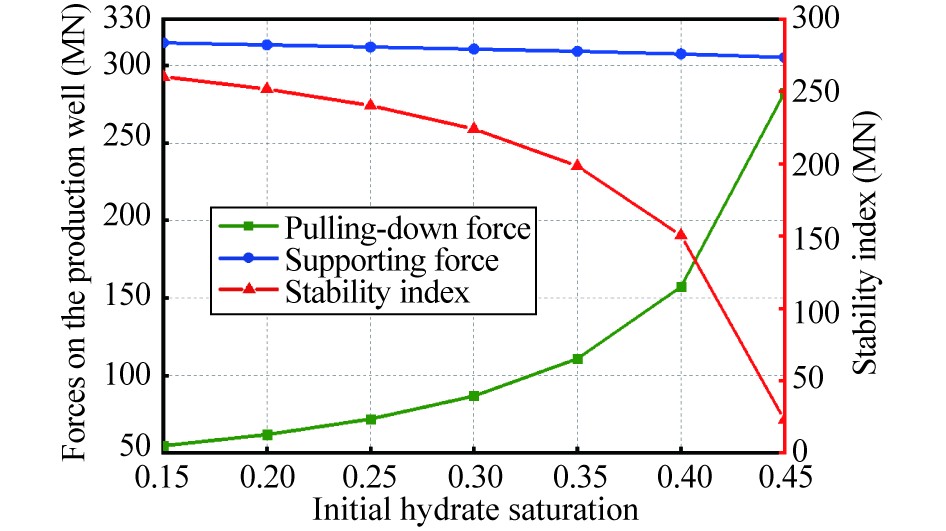
Different from oil and gas production, hydrate reservoirs are shallow and unconsolidated, whose mechanical properties deteriorate with hydrate decomposition. Therefore, the formations will undergo significant subsidence during depressurization, which will destroy the original force state of the production well. However, existing research on the stability of oil and gas production wells assumes the formation to be stable, and lacks consideration of the force exerted on the hydrate production well by formation subsidence caused by hydrate decomposition during production. To fill this gap, this paper proposes an analytical method for the dynamic evolution of the stability of hydrate production well considering the effects of hydrate decomposition. Based on the mechanical model of the production well, the basis for stability analysis has been proposed. A multi-field coupling model of the force state of the production well considering the effect of hydrate decomposition and formation subsidence is established, and a solver is developed. The analytical approach is verified by its good agreement with the results from the numerical method. A case study found that the decomposition of hydrate will increase the pulling-down force and reduce the supporting force, which is the main reason for the stability deterioration. The higher the initial hydrate saturation, the larger the reservoir thickness, and the lower the production pressure, the worse the stability or even instability. This work can provide a theoretical reference for the stability maintaining of the production well.
Different from oil and gas production, hydrate reservoirs are shallow and unconsolidated, whose mechanical properties deteriorate with hydrate decomposition. Therefore, the formations will undergo significant subsidence during depressurization, which will destroy the original force state of the production well. However, existing research on the stability of oil and gas production wells assumes the formation to be stable, and lacks consideration of the force exerted on the hydrate production well by formation subsidence caused by hydrate decomposition during production. To fill this gap, this paper proposes an analytical method for the dynamic evolution of the stability of hydrate production well considering the effects of hydrate decomposition. Based on the mechanical model of the production well, the basis for stability analysis has been proposed. A multi-field coupling model of the force state of the production well considering the effect of hydrate decomposition and formation subsidence is established, and a solver is developed. The analytical approach is verified by its good agreement with the results from the numerical method. A case study found that the decomposition of hydrate will increase the pulling-down force and reduce the supporting force, which is the main reason for the stability deterioration. The higher the initial hydrate saturation, the larger the reservoir thickness, and the lower the production pressure, the worse the stability or even instability. This work can provide a theoretical reference for the stability maintaining of the production well.












2024, 38(2): 352-361.
doi: 10.1007/s13344-024-0029-7
Abstract:
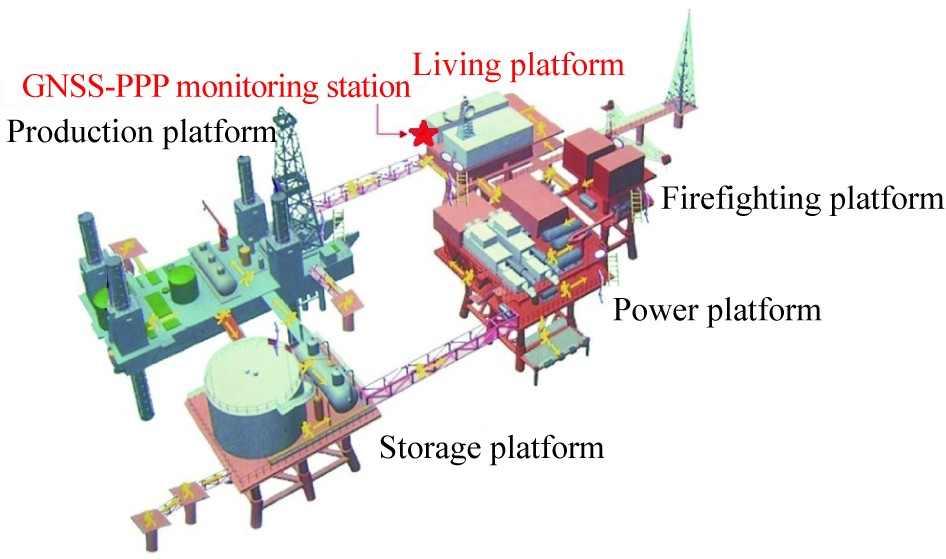
The real-time dynamic deformation monitoring of offshore platforms under environmental excitation is crucial to their safe operation. Although Global Navigation Satellite System-Precise Point Positioning (GNSS-PPP) has been considered for this purpose, its monitoring accuracy is relatively low. Moreover, the influence of background noise on the dynamic monitoring accuracy of GNSS-PPP remains unclear. Hence, it is imperative to further validate the feasibility of GNSS-PPP for deformation monitoring of offshore platforms. To address these concerns, vibration table tests with different amplitudes and frequencies are conducted. The results demonstrate that GNSS-PPP can effectively monitor horizontal vibration displacement as low as ±30 mm, which is consistent with GNSS-RTK. Furthermore, the spectral characteristic of background noise in GNSS-PPP is similar to that of GNSS-RTK(Real Time Kinematic). Building on this observation, an improved Complete Ensemble Empirical Mode Decomposition with Adaptive Noise (CEEMDAN) has been proposed to de-noise the data and enhance the dynamic monitoring accuracy of GNSS-PPP. Field monitoring application research is also undertaken, successfully extracting and analyzing the dynamic deformation of an offshore platform structure under environmental excitation using GNSS-PPP monitoring in conjunction with improved CEEMDAN de-noising. By comparing the de-noised dynamic deformation trajectories of the offshore platform during different periods, it is observed that the platform exhibits reversible alternating vibration responses under environmental excitation, with more pronounced displacement deformation in the direction of load action. The research results confirm the feasibility and potential of GNSS-PPP for dynamic deformation monitoring of offshore platforms.
The real-time dynamic deformation monitoring of offshore platforms under environmental excitation is crucial to their safe operation. Although Global Navigation Satellite System-Precise Point Positioning (GNSS-PPP) has been considered for this purpose, its monitoring accuracy is relatively low. Moreover, the influence of background noise on the dynamic monitoring accuracy of GNSS-PPP remains unclear. Hence, it is imperative to further validate the feasibility of GNSS-PPP for deformation monitoring of offshore platforms. To address these concerns, vibration table tests with different amplitudes and frequencies are conducted. The results demonstrate that GNSS-PPP can effectively monitor horizontal vibration displacement as low as ±30 mm, which is consistent with GNSS-RTK. Furthermore, the spectral characteristic of background noise in GNSS-PPP is similar to that of GNSS-RTK(Real Time Kinematic). Building on this observation, an improved Complete Ensemble Empirical Mode Decomposition with Adaptive Noise (CEEMDAN) has been proposed to de-noise the data and enhance the dynamic monitoring accuracy of GNSS-PPP. Field monitoring application research is also undertaken, successfully extracting and analyzing the dynamic deformation of an offshore platform structure under environmental excitation using GNSS-PPP monitoring in conjunction with improved CEEMDAN de-noising. By comparing the de-noised dynamic deformation trajectories of the offshore platform during different periods, it is observed that the platform exhibits reversible alternating vibration responses under environmental excitation, with more pronounced displacement deformation in the direction of load action. The research results confirm the feasibility and potential of GNSS-PPP for dynamic deformation monitoring of offshore platforms.







ScholarOne Manuscripts Log In
Current Issue
- Volume 39
- Issue 2
- April 2025
- Editor-in-Chief:
- Superintended by:
CHINA ASSOCIATION FOR SCIENCE AND TECHNOLOGY
- Sponsored by:
Chinese Ocean Engineering Society (COES)
- Edited by:
Nanjing Hydraulic Research Institute
Highlights
Stay up to Date
 Article abstracts by RSS
Article abstracts by RSS E-mail Alerts
E-mail Alerts